Фиг,1
Изобретение относится к управлению работой горных маш-iK и может найти применение при управлении процессом драгирования.
Целью изобретения является повышение производительности драгирования
Изобретение позволяет исключить колебания скорости боковой подачи, возникаюрще от действия переменной составляющей тока нагрузки привода черпаковой цепио Скорость боковой подачи остается постоянной при посто- я1йном среднем значении тока нагрузки, колебания тока нагрузки устанав- ливаются равными-значению порогового сигнала, не превьшают этого порога и потому не изменяют сигнала управления приводом боковой подачи.
Поскольку скорость черпания по- стоянная, то при постоянстве скорости боковой подачи не нарушается соотношение скороетей о Параметры стружНепрерывно измеряют величину исход ного сигнала, получаемого с датчика 1 тока, характеризующего нагрузку черпаковой цепи драги, и сравнивают ее ткухцее значение Ii, с выходным сигналом I5 задатчика 4 тока с помощью сумматора 3, Одновременно сигнал 1ц преобразуют с помощью фильтра 2 в усредненную во времени амплитуду переменной составляющей тока нагрузки черпаковой цепи, которую сравнивают с результативным сигналом сравнения
сумматора 5, и в зависимости от величины и знака отклонения изменяют ско рость боковой подачи драги Vg-. Напри-
величину ul-f с выхода сумматора 3 получают сигнал соответствующей амплитуды отрицательной полярности, который превышает не изменившийся порого
ки при этом сохраняются постоянными и близкими к оптимальным, при кото- 25 текутдего значения тока нагрузки чер рых энергетические затраты и, значит, паковой цепи с заданным с помощью ток нагрузки черпаковой цепи мини- мал1эны. При колебаниях боковой скорости и параметров стружки, отклоня- ЮЕЩхся от оптимального значения, воз- OQ превышении текупдам значени- растает ток нагрузки черпаковой це- ем тока нагрузки 1р заданного пи, что вызывает снижение скорости боковой подачи и, следовательно, производительности драгирования.
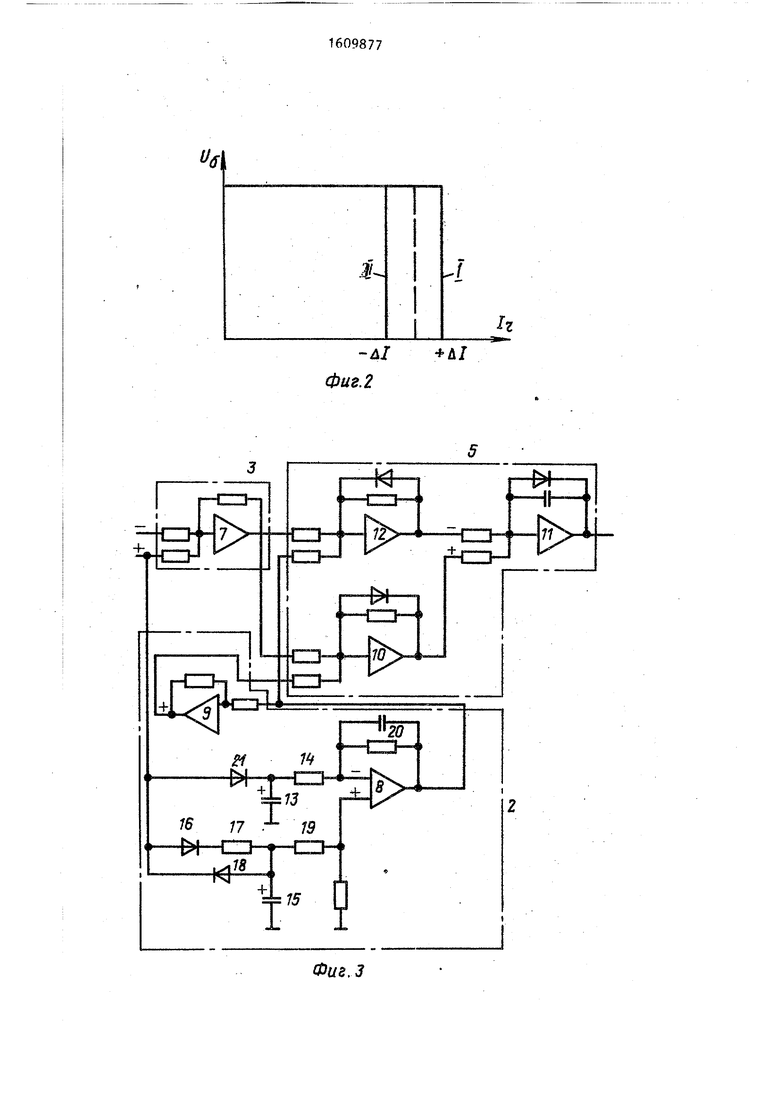
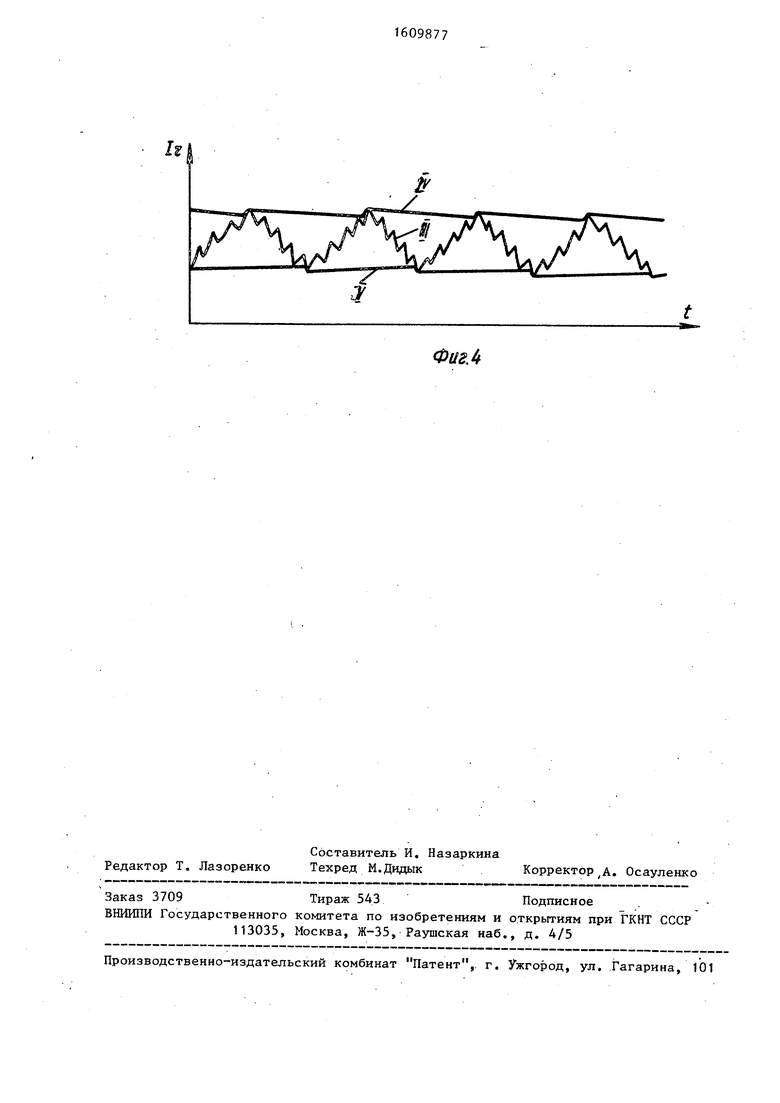
На фиг. 1 представлена функциональная схема устройства,- реализу- 5 вый сигнал . А1 с выхода фильтра 2„ ющего предлагаемый способ; на фиг.2 - Оба названных сигнала сравнивают график зависимости Vj. f(lp); на фиг, 3 - принципиальная электрическая схема устройства, реализующего предлагаемый способ без задатчика и датчика тока; на фиг, 4 - график, иллюстрируюшр й работу фильтра переменной составляющей тока нагрузки. Устройство, реализующее способ (фиг. 1), содержит датчик 1 тока нагрузки привода черпаковой цепи (например, трансформаторный), выход которого соединен с фильтром 2 переменной составляющей тока нагрузки привода черпаковой цепи и с входом первого сумматора 3, другой вход ко40
45
торого соединен с задатчиком 4 тока нагрузки (например, потенциометричес- ким). Выход сумматора 3 соединен с входом второго сумматора 5, другой вход которого соединен с выходом фильтра 2 переменной составляющей тока нагрузки привода черпаковой.
на сумматоре 5 интегрального типа и, поскольку сигнал отрицательной поляр ности преобладает, снижают скорость, боковой подачи V (кривая I на фиг. 2) до тех пор, пока нагрузка черпаковой цепи не снизится до задан ной. В том случае, когда нагрузка черпаковой цепи 11 ниже заданной на ту лее величину Д1, на выходе сумматора 3 получают сигнал положительной полярности, который превышает не изменивщийся пороговый сигнал Д1 с выхода фильтра 2. Оба указанных сигнала также сравнивают на сумматор 5 интегрального типа и, поскольку си нал положительной полярности преобладает, повьшгают скорость боковой подачи Vg- (кривая II на фиг 2) до 55 тех пор, пока нагрузка черпаковой цепи не повысится до заданной. При увеличении крепости породы и при неизменном среднем значении 1г вбзрас50
10
5 209877
цепи, выход второго сумматора 5 соединен с входом электропривода 6 лебедок носовых каналов.
Сумматор 3 выполн€;н на операционном усилителе 7, фильтр 2 переменной составляющей - на операционные усилителях 8 и 9, второй сумматор 5 - на операционных усилителях 10, 11 и 12.
Способ управления процессом драгирования осзпцествляется следующим образом.
Непрерывно измеряют величину исходного сигнала, получаемого с датчика 1 тока, характеризующего нагрузку черпаковой цепи драги, и сравнивают ее ткухцее значение Ii, с выходным сигналом I5 задатчика 4 тока с помощью сумматора 3, Одновременно сигнал 1ц преобразуют с помощью фильтра 2 в усредненную во времени амплитуду переменной составляющей тока нагрузки черпаковой цепи, которую сравнивают с результативным сигналом сравнения
25 текутдего значения тока нагрузки чер паковой цепи с заданным с помощью OQ превышении текупдам значени- ем тока нагрузки 1р заданного сумматора 5, и в зависимости от величины и знака отклонения изменяют скорость боковой подачи драги Vg-. Напри-
текутдего значения тока нагрузки чер паковой цепи с заданным с помощью превышении текупдам значени- ем тока нагрузки 1р заданного
величину ul-f с выхода сумматора 3 получают сигнал соответствующей амплитуды отрицательной полярности, который превышает не изменившийся пороготекутдего значения тока нагрузки чер паковой цепи с заданным с помощью превышении текупдам значени- ем тока нагрузки 1р заданного
вый сигнал . А1 с выхода фильтра 2„ Оба названных сигнала сравнивают
вый сигнал . А1 с выхода фильтра 2„ Оба названных сигнала сравнивают
на сумматоре 5 интегрального типа и, поскольку сигнал отрицательной полярности преобладает, снижают скорость, i боковой подачи V (кривая I на фиг. 2) до тех пор, пока нагрузка черпаковой цепи не снизится до заданной. В том случае, когда нагрузка черпаковой цепи 11 ниже заданной на ту лее величину Д1, на выходе сумматора 3 получают сигнал положительной полярности, который превышает не изменивщийся пороговый сигнал Д1, , с выхода фильтра 2. Оба указанных сигнала также сравнивают на сумматоре 5 интегрального типа и, поскольку сигнал положительной полярности преобладает, повьшгают скорость боковой подачи Vg- (кривая II на фиг 2) до тех пор, пока нагрузка черпаковой цепи не повысится до заданной. При увеличении крепости породы и при неизменном среднем значении 1г вбзрас
тает амплитуда переменной составляющей тока нагрузки, соответственно на такую же величину увеличиваются. Д и ul-f в результате чего скорость боковой подачи v не изменяют.
Работа устройства, реализующего предлагаемый способ, заключается в следующем.
Исходный сигнал If, в фильтре 2 сначала преобразуется в амплитуды высокого (кривая IV на фиг. 4) и низкого (кривая V на фиг„ 4) уровней, при этом через диод 21 конденсатор 13 заряжается мгновенно до амплитуды высокого уровня исходного сигнала, а разряд происходит медленно через резистор 14 суммирующего (операционного) усилителя 8 о Конденсатор 15 заряжается медленно через диод 16 и резистор 17, когда исходный сигнал Ij. имеет высокий уровень напряжения, а разряжается мгновенно до самого низкого уровня исходного сигнала через диод 18о Сигнал с конденсатора 15 подается через входной резистор 19 на неинвертирзтощий вход усилителя 8. На выходе усилителя 8 формируется усредненный во времени с помощью конденсатора 20 сигнал, пропорциональный амплитуде переменной составляющей исходного сигнала, ко- торый инвертируется усилителем 9 для получения противоположного знака Сигналы с выходов усилителей 8 и 9 являются пороговым значением 1Д.1г величины отклонения текущего тока нагрузки If (кривые I и II на фиг.2) от заданного значения нагрузки I-, черпаковой цепио
Сравнение сигналов на сумматорах 3 и 5 и обработка скорости боковой одачи Vj- происходят аналогично описанному выше. В том случае, когда игнал задатчика тока 1 вьше сигала с датчика тока If на величину 1 на выходе первого сумматора 3. игнал положительной полярности пре- ьппает пороговый сигнал AI-ь отрицаельной полярности на входе операци0
5
0
5
онного усилителя 9, выходной сигнал которого интегрируется интегратором на операционном усилителе 11 в сторону увеличения на его выходе сигнала положительной полярности. Скорость боковой подачи возрастает по кривой II (фиг. 2) до тех пор, пока нагрузка черпаковой цепи не возрастет до заданной. В противном случае, когда сигнал задатчика тока ниже сигнала с датчика тока, на выходе первого сумматора 3 сигнал отрицательной полярности превышает пороговый сигнал положительной полярности на выходе операционного усилителя 10, выходной сигнал которого уменьшает сигнал на выходе интегратора 11. Скорость боковой подачи падает по кривой I (фиг. 2) до тех пор, пока нагрузка черпаковой цепи не снизится до заданной.
Б случае, когда сигнал AI-j- не превьЕчает сигнала Мг выходах операционных усилителей 9 и 10 сигналы равны О, на выходе интегрирующего усилителя 11 сигнал не меняется, следовательно, скорость боковой подачи остается постоянной.
30
Формула из
р е т е н и я
Способ автоматического управления процессом драгирования, заключающийся в определении текущего значения тока нагрузки черпаковой цепи, сравнении его с заданным и выработке управляющего сигнала на изменение скорости боковой подачи драги, отличающийся тем, что, с целью повышения производительности драгирования, дополнительно определяют усредненную амплитуду переменной состав- тока нагрузки черпаковой цепи, сравнивают ее с результативным сигналом сравнения текущего и заданного значений тока нагрузки черпаковой по результату сравнения изменяют скорость боковой подачи раги.
-л -t-nl Фиг. 2

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения крепости грунта при драгировании | 1983 |
|
SU1129289A1 |
| Устройство управления добычным комплексом драги | 1979 |
|
SU876862A1 |
| Устройство контроля категории крепости грунта при драгировании | 1983 |
|
SU1106900A1 |
| Устройство управления добычным комплексом драги | 1982 |
|
SU1114745A1 |
| Устройство управления добычным комплексом драги | 1980 |
|
SU972005A1 |
| Устройство для автоматического регулирования добычного комплекса драги | 1980 |
|
SU1076538A1 |
| Устройство управления добычным комплексом драги | 1981 |
|
SU994627A2 |
| Устройство для автоматического регулирования нагрузки черпаковой цепи драги | 1977 |
|
SU682604A1 |
| Устройство регулирования производительности драги | 1986 |
|
SU1372018A1 |
| Электропривод лебедок носовых канатов драги | 1986 |
|
SU1421827A1 |
Изобретение относится к управлению горными машинами, в частности драгами. Цель - повышение производительности драгирования. Способ основан на определении датчиком 1 тока текущего значения тока нагрузки черпаковой цепи и сравнении его в сумматоре 3 с заданным задатчиком 4 тока (сигнал ΔJт). Дополнительно определяют усредненную во времени амплитуду переменной составляющей тока нагрузки черпаковой цепи в фильтре 2 (±ΔJз. Затем сравнивают в сумматоре 5 полученные сигналы ΔJт и ± ΔJз и по результатам сравнения вырабатывают сигнал на изменение скорости боковой подачи драги. 4 ил.
Фие.З
ФигЛ
| Устройство для автоматического регулирования нагрузки черпаковой цепи драги | 1977 |
|
SU682604A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ автоматического управления процессом черпания многочерпаковых драг | 1974 |
|
SU723040A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
