а
00
о
4; СО
J 8.9.W
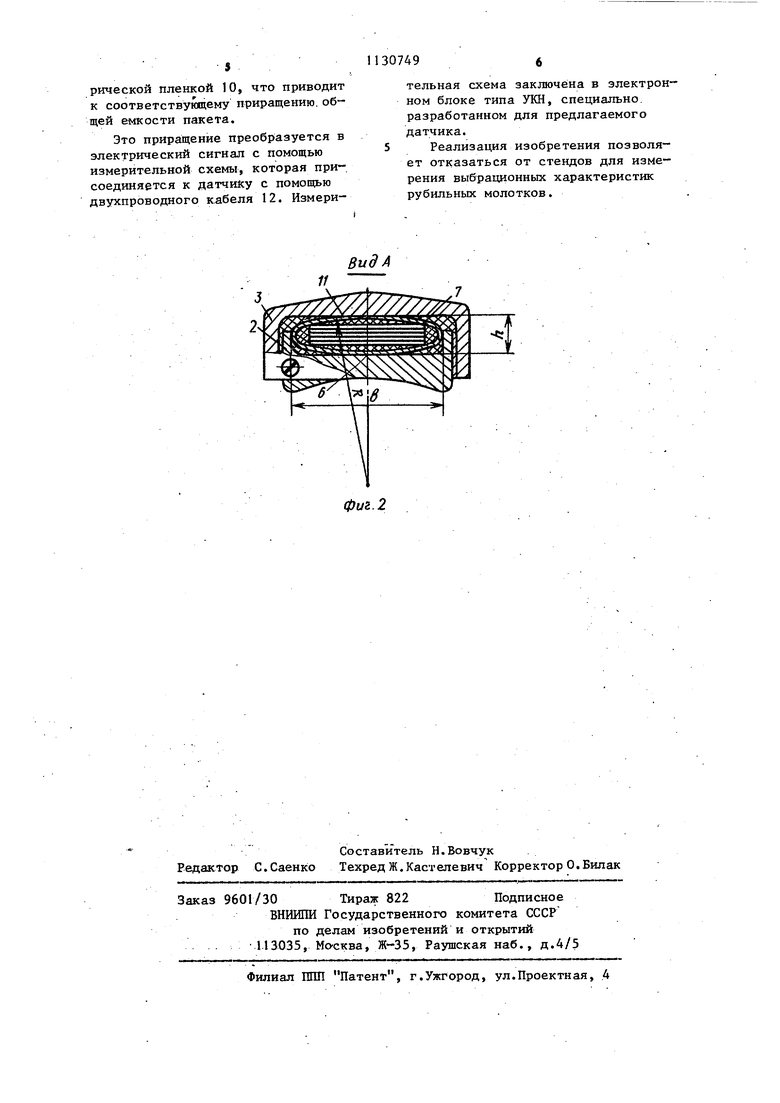
Фиг.1 Изобретение относится к сило.13мерительной технике, а именно к 1 онтролю силового вз.аимодействия человека с механизированным инструментом. Известны устройства(тензодатчики для замера усилий нажатия tl. Недох:татком таких устройств является необходимость снабжения их сложной аппаратурой, кроме того они требуют длительного подбора да чиков, их крепления, а также мер по компенсации температурной погреш ности показаний. Наиболее близким к изобретению по назначению конструкции является датчик для измерения усилия .нажатия при различных производственных операциях, содержащий держатель, состо ящий из плоских по орме основания и крышки., в которой помещены пружин ная пластина с опорными клиньями и чувствительньй преобразователь катушки индуктивности. Имея размеры 60x40x15, датчик закрепляется на рукоятке инструмента и воспринимает усилия кисти работающего С. Недостатком известного датчика является низкая точность измерения Это вызвано тем,что основание и крышка датчика плоские, следовательно, отсутствует четкое сочленение держателя датчика с кистью руки работающего и рукояткой инструмента. Кроме того, на точность измерени отрицательно влияет смещение равнодействующей нагрузки, прикладываемо к датчику, от центральной оси крышки, вызванной мьш1ечной усталостью кисти, вибрацией инструмента и дру гими причинами. При этом концы пружинной пластины прогибаются неидеитично и расстояние их до катушек сокращается несинхронно, а из-за нелинейной зависимости сигналов катушек индуктивности от расстояни до пружинной .пластины возникает дополнительная погрешность в измер нии . Цель изобретения - повышение точности измерений усилия нажатия н рукоятки механизированного инструмента. Поставленная цеЯь достигается т что в датчике силы нажатия для ручного инструмента,, содержащем корпус, выполненный из основания и ;Крышки, и размещенный между ними с 1атягом чувствительный преобразогватель, основание и крышка свободно устано 5лены одно в другой, образуя коробчатый корпус, и скреплены вдоль одной из продольных сторон с возможностью качания крышки, а чувствительный пресзбразователь выполнен в виде .элек.троемкостного элемента эллипсообразной формы с радиусом по верхности, воспринимающей силу, равным 12 2Ь где в - ширина преобразователя; h - его высота, при этом свободные полости корпуса заполнены эластичным герметиком. Сущность изобретения заключается в том, что жесткая крьппка корпуса, воспринимающая и передающая внешнее усилие, взаимодействует с податливой пружинящей оболочкой чувствительного преобразователя без каких-либо дополнительных центрирующих силовводящих элементов. По мере увеличения нагрузки и сжатия преобразователя крьш1ка перекатывается по выпуклой части эллипсообразной оболочки, соприкасаясь с ней с переменным эксцентриситетом в последовательно перемещающихся точках, расположенных в локальной области, определяемой радиусом эллипсообразной выпуклости. Благодаря безлюфтовому соединению крьш1ки с основанием и обеспечению ограниченной подвижности качания крьшпси только в поперечном направлении, а также фиксации чувствительного элемента в корпусе, например, путем его жесткого локальнего сочленения с основанием обеспечивается строгая повторяемость точек взаимодействия крьшжи с оболочкой преобразователя при многократных нагружениях. - Силовоспринимающей эллипсообразной поверхности чувствительного преобразователя придан оптимальный найденный экспериментально радиус R Ъ2/211 , где в - ширина, h - высота преобразователя. При таком радиусе не возникает больших эксцентриситетов приложения нагрузки, так как ширина локальной области взаимодействия крьш1ки с эллипсообразной поверхностью не превьш1ает 0,1 в, и обеспечивается минимальная высота h оболочки преобрапователя, незначительно пре- вьпиаютая высоту заключенного в него плоского элемента датчика, что облегчает условия взаимодействия оболочки с емкостным элементом Заполнение свободных воздушных полостей внутри корпуса эластичным герметиком саздает вокруг чувствительного преобразователя демпфирую щую подушку,.которая защищает локальную область контактирования крьппки с оболочкой преобразователя от воздействия неблагоприятных факторов окружающей среды: пыли, влаги, агрессивных газов и других, а также повышает вихропомехозащищенность датчика. На фиг.1 изображен предлагаемый датчик, продольный разрез; на фиг.2 - )вид А на фиг.1. Датчик вьтолнен в продольном направлении размером 65 см, что соответствует активному участку ладони человека. Датчик силы содержит корпус 1, состоящий из основании 2 и крьщ1ки 3. Последние коробчатой формы и сво бодно установлены одно в другой с зазорами между стенками порядка 0,2 мм. Зазоры обеспечивают возмоз1г ность качания крышки, щарнирно скрепленной с основанием. Подошва основания 2 образована вогнутой поверхностью соответственно округлой форме рукояток инструментов. Наружная поверхность крьш1ки 3 выполнена симметрично выпуклой как в поперечном, так ив продольном сечениях. Крьщ1ка и основание скреплены меж ду собой осями 4, расположенными вдоль одной оси из .боковых сторон корпуса и равноудаленными от нее, т.е. крышка 3 имеет возможность качания в небольших пределах относительно основания 2. В поперечной плоскости в центре корпу са 1 между крышкой и основанием зафиксирован чувствительный преобразователь 5 путем его жесткого сочленения с основанием по лок ной площадке 6. Он содержит метахин ческий корпус - мембрану 7 эллипсообразной формы, вьтолнеиный из упр гого материала, например пружинной стали. Внутри корпуса размещен электроемкостный чувствительный элемент 8, представляющий собой na94кет упругих электродов 9, разделенных диэлектрической пленкой 10. Свободные полости внутри чувствительного элемента заполняются эластичным компаундом 11, который вьтолняет также функции герметика. Электроды чувствительного элемента присоединяются к двухпроводному кабелю 12, проходящему через отверстия в торцах крышки и основания. Свободное пространство внутри корпуса 1 вокруг чувствительного преобразователя 5 заполнено эластичным герметиком 13. В основании 2 предусмотрены отверстия 14 для притягивания датчика к рукояткам инструментов. При длине 65 мм датчик вьтолняется пгариной 18 мм и высотой в среднем продольном сечении 8 мм. При таких габаритах и форме датчик удобно сочленяется с рукой.рабочего и инструментом. Перед началом датчик устанавливается (накладывается) на активную часть рукоятки инструмента и прикрепляется к ней с помощью шиуров, проходящих через отверстия в основании. Подошва основания 2, имекгщая вогнутую форму, устойчиво без качаний прилегает к рукоятке инструмента . Датчик работает следующим образом. При приложении соответствующих усилий работающего к рукоятке инст румента благодаря симметрично выпуклой форме крышки корпуса равнодействующая усилия нажатия сосредотачивается в центре последней. Под действием этого усилия крышка 3 стремится приблизиться к основанию 2, свободно качаясь относительно него ,в поперечном сечении, исключая тем самым перекосы и заклинивания. Передача усилия нажатия с крьгагки 3 на чувствительный преобразователь происходит с фиксированной локальностью, строго по линии касания эллипсообразного упругого корпуса 7 преобразователя 5, с крышкой 3, причем эта линия параллельна продольной оси держателя. Деформация упругого корпуса 7 через прослойку эластичного компаунда 1I передается электроемкостному элементу 8, при этом электроды 9 сближаются за счет уменьшения микрозазоров, между ними и диэлектрической пленкой 10, что приводит к соответствующему приращению, общей емкости пакета.
Это приращение преобразуется в электрический сигнал с помощью измерительной схемы, которая присоединяется к датчику с помощью двухпроводного кабеля 12. Измерительная схема заключёна в электронном блоке типа УКН, специально, разработанном для предлагаемого датчика.
Реализ ация из обре тения по з воля- ет отказаться от стендов для измерения выбрационных характеристик рубильных молотков.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕЖТЕЛОВОЙ ИМПЛАНТ ДЛЯ СТАБИЛИЗАЦИИ ШЕЙНОГО ОТДЕЛА ПОЗВОНОЧНИКА И УСТРОЙСТВО ДЛЯ ЕГО УСТАНОВКИ | 2020 |
|
RU2778201C2 |
| КОРПУС ДЛЯ ЛИНЕЙНОГО ДОРОЖНОГО ДАТЧИКА | 2014 |
|
RU2564150C1 |
| ДАТЧИК ВЕСА АВТОТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2554678C1 |
| КОНТЕЙНЕР СО СЪЕМНОЙ РУКОЯТКОЙ ДЛЯ ТРАНСПОРТИРОВКИ И ХРАНЕНИЯ ПРЕДМЕТОВ | 2016 |
|
RU2635075C1 |
| БАНКА МЕДИЦИНСКАЯ МАССАЖНАЯ | 2005 |
|
RU2280475C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2013 |
|
RU2541711C1 |
| КАРДИОДАТЧИК | 1991 |
|
RU2012225C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВИБРАЦИИ НАКОНЕЧНИКА УЛЬТРАЗВУКОВОГО ВОЛНОВОДА | 2015 |
|
RU2593444C1 |
| Системы ирригации и аспирации офтальмологического аппарата для катарактальной и витреальной хирургии | 2019 |
|
RU2720821C1 |
| УСТРОЙСТВО ДЛЯ СТИРКИ, И/ИЛИ ЧИСТКИ, И/ИЛИ ДЕЗИНФЕКЦИИ | 1997 |
|
RU2118417C1 |
ДАТЧИК СИЛЫ НАЖАТИЯ для ручного инструмента, содержащий корпус, выполненныйиз основания и кглип- ки, и размещенный между ними с наi тягом чувствительный преобразователь, отличающийся тем, что, с целью повьшеиия точности измерений., основание и крышка свободно установлены одно в другой, образуя коробчатый корпус, и скреплены вдоль одной из продольных сторон с возможностью качания крышки, а чувствительный преобразователь выполнен в виде электроемкостного элемента эллипсообразной формы с радиусом поверхности, воспринимакгщей силу, равным Ь2 R 21i (Л где в - ширина преобразователя; h - его высота, при этом свободные полости корпуса заполнены эластичным герметиком.
| КГершман Я.Г | |||
| Устройство для измерения составляющих сил реакций при работе ручной машиной.- Механизированный инструмент и отделочные машины | |||
| Экспресс-информацияЦНИИТЭст.роймаш, № 18, 1972, 2 | |||
| Шкулинский A.M | |||
| и др | |||
| Защита от вибраций при работе с пневматическими шлифовальными машинами | |||
| М., Машиностроение, 1976,.с.41-43 (прототип). |
