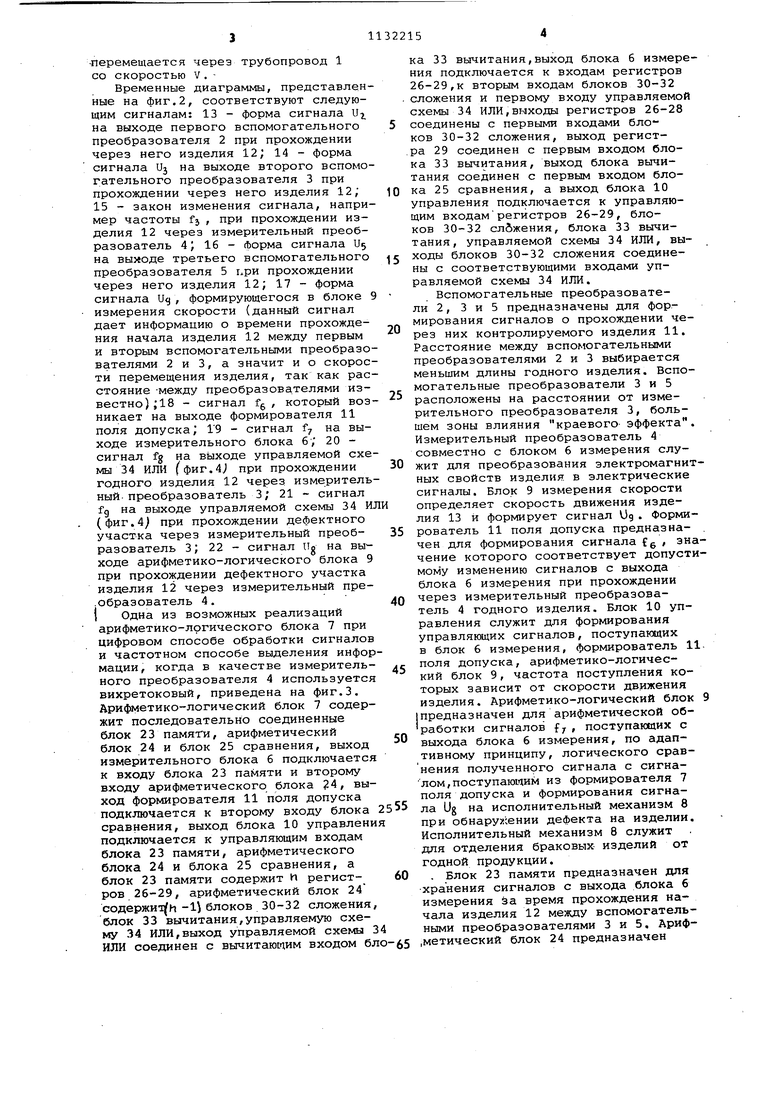
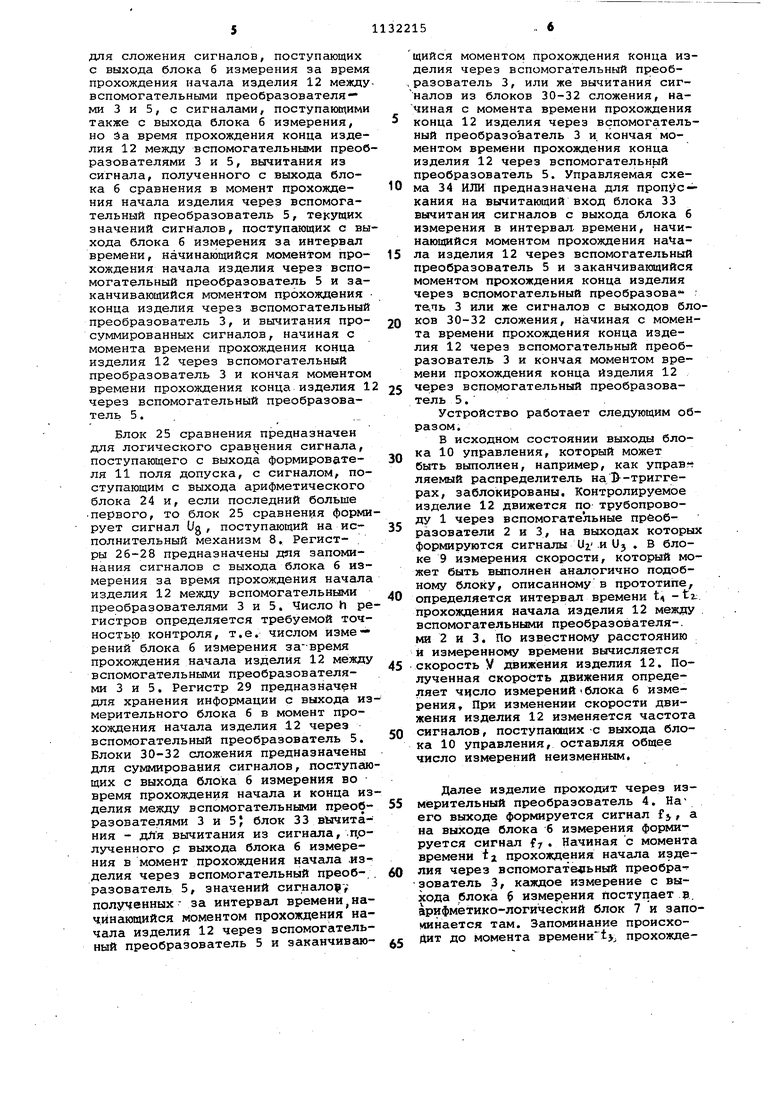
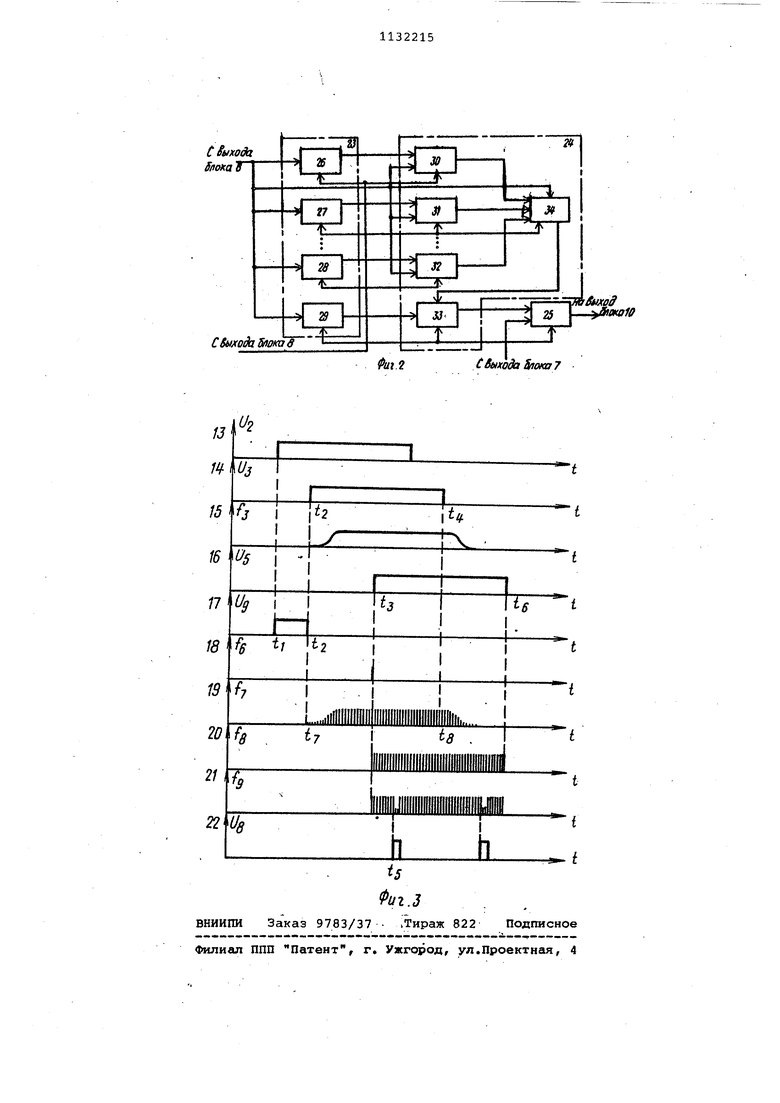
Изобретение относится к нераэрушающему контролю и может быть испол зовано для дефектоскопии протяженны электропроводящих изделий в процессе их движения, включая краевые зоны. Известен дефектоскоп для контроля изделий в процессе их движения, содержащий измерительный преобразователь, соединенный с его выходом и мерительный блок, 2п вспомогательны преобразователей, установленные по п преобразователей с осевым зазором по обе стороны от измерительного преобразователя, блок управления, к входам которого подключены вспомо гательные преобразователи, блок коэ фициентов, вход которого подключен к выходу блока управления, блок умножения , первый вход которого подключен к выходу блока коэффициентов а второй вход соединен с выходом из мерительного блока, а выход блока у ножения соединен с арифметико-логическим блоком С 13. Недостаток известного устройства состоит в низкой надежности контроля, что связано с наличием неконтролируемых зон, определяемых зазора ми между преобразователями. Наиболее близок к изобретению по технической сущности дефектоскоп дл контроля изделий в процессе их движения, содержащий трубопровод, последовательно установленные вдоль оси последнего первый и второй вспо могательные преобразователи и измерительный преобразователь, последовательно соединенные измерительный блок, арифметико-логический блок и иcпoJшитeльный механизм, последовательно соединенные блок измерения скорости и блок управления, первый выход последнего соединен с управляющим входом измерительного блока, а второй выход - с управляющим входом арифметико-логического блока, первый и второй вспомогательные пре образователи подключены соответстве но к первому и второму входам блока измерения скорости, а выход измерительного преобразователя подключен к входу измерительного блока С 2. Однако и этот дефектоскоп не обе печивает требуемой надежности контроля, что связано с влиянием вариации электрофизических и геометричес ких параметров контролируемых изде лий на результаты дефектоскопии. Цель изобретения - повышение надежности контроля. Поставленная цель достигается тем, что дефектоскоп для контроля и делий в,процессе их движения, содер жащий трубопровод, последовательно установленные вдоль оси последнего первый и второй вспомогательные пре образователи и измерительный преобразователь, последовательно соедкнен-ные измерительный блок, арифметикологический блок и исполнительный механизм, последовательно соединенные блок измерения скорости и блок управления , первый выход последнего соединен с управляющим входом измерительного блока, а второй выход - с управляющим входом арифметико-логического блока, первый и второй вспомогательные преобразователи подключены соответственно к первому и второму входам блока измерения скорости, а выход измерительного преобразователя подключен к входу измерительного блока, снабжен третьим вспомогательным преобразователем, подключенным к третьему входу блока измерения скорости и установленным симметрично второму вспомогательному преобразователю относительно измери-тельного преобразователя, а также формирователем поля допуска, подключенным сигнальным входом .к выходу измерительного преобразователя, управляющим входом - к третьему выходу блока управления и входом - к второму входу арифметико-логического блока. На фигД представлена структурная схема дефектоскопа для контроля изделий в процессе их движения на фиг.2 - временные диаграммы сигналов; на фиг.З - одна из возможных реализации арифметико-логического блока. Дефектоскоп для контроля изделий в процессе их движения содержит трубопровод 1, последовательно установленные вдоль оси последнего вспомогательные преобразователи 2 и 3, измерительный преобразователь 4 и вспомогательный преобразователь 5, установленный симметрично вспомогательному преобразователю 3 относительно измерительного преобразователя 4, последовательно соединенные блок 6 измерения, арифметико-логический блок 7 и.исполнительный механизм 8, последовательно соединенные блок 9 измерения скорости, подключенный входами к вспомогательным преобразователям 2, 3,5, и блок 10 управления, подключенный первым выходом к управляющему входу арифметико-логического блока 7, а также формирователь 11 поля допуска, включенный между выходом измерительного преобразователя 4 и входом арифметико-логического блока 7. Блок 10 управления- подключен вторым выходом к управляющему входу блока 6 измерения и третьим выходом,- к управляющему входу формирователя 11 поля допуска, а сигнальный вход блока б измерения подключен к выходу измерительного преобразователя,4, Контролируемое изделие 12 в процессе контроля перемещается через трубопровод 1 со скоростью V. Временные диаграммы, представлен ные на фиг.2, соответствуют следующим сигналам: 13 - форма сигнала и,. на выходе первого вспомогательного преобразователя 2 при прохождении через него изделия 12; 14 - форма сигнала Uj на выходе второго вспомо гательного преобразователя 3 при прохождении через него изделия 12; 15 - закон изменения сигнала, напри мер частоты fj , при прохождении изделия 12 через измерительный преобразователь 4J 16 - форма сигнала и на выходе третьего вспомогательного преобразователя 5 ьри прохождении через него изделия 12; 17 - форма сигнала и) , формирующегося в блоке измерения скорости (данный сигнал дает информацию о времени прохождения начала изделия 12 между первым и вторым вспомогательными преобразо вателями 2 и 3, а значит и о скорос ти перемещения изделия, так как рас стояние -между преобразователями известно); 18 - сигнал fg , который воз никает на выходе формирователя 11 поля допуска; Г9 - сигнал f-j на выходе измерительного блока б; 20 сигнал fg на выходе управляемой схе мы 34 ИЛИ (фиг.4 при прохождении годного изделия 12 через измеритель ный- преобразователь 3; 21 - сигнал fg на выходе управляемой схемы 34 И (фиг.4 при прохождении дефектного участка через измерительный преобразователь 3; 22 - сигнал Ug на выходе арифметико-логического блока 9 при прохождении дефектного участка изделия 12 через измерительный пре.образователь 4. 1 Одна из возможных реализаций арифметико-логического блока 7 при цифровом способе обработки сигналов и частотном способе выделения инфор мации, когда в качестве измерительного преобразователя 4 используется вихретоковый, приведена на фиг.З. Арифметико-логический блок 7 содержит последовательно соединенные блок 23 памяти, арифметический блок 24 и блок 25 сравнения, выход измерительного блока б подключается к входу блока 23 памяти и второму входу арифметического блока 4, выход формирователя 11 поля допуска подключается к второму входу блока сравнения, выход блока 10 управлени подключается к управляющим входам блока 23 памяти, арифметического блока 24 и блока 25 сравнения, а блок 23 памяти содержит И регистров 26-29, арифметический блок 24 содержич И -li блоков 30-32 сложения, блок 33 вычитания,управляемую схему 34 ИЛИ,выход управляемой схемы 3 ИЛИ соединен с вычитающим входом бл ка 33 вычитания,выход блока б измерения подключается к входам регистров 26-29,к вторым входам блоков 30-32 сложения и первому входу управляемой схемы 34 ИЛИ,выходы регистров 26-28 соединены с первыми входами блоков 30-32 сложения, выход регистра 29 соединен с первым входом блока 33 вычитания, выход блока вычитания соединен с первым входом блока 25 сравнения, а выход блока 10 управления подключается к управляющим входамрегистров 26-29, блоков 30-32 сл&жения, блока 33 вычитания, управляемой схемы 34 ИЛИ, выходы блоков 30-32 сложения соединены с соответствующими входами управляемой схемы 34 ИЛИ. Вспомогательные преобразователи 2 , 3 и 5 предназначены для формирования сигналов о прохождении через них контролируемого изделия 11. Расстояние между вспомогательными преобразователями 2 и 3 выбирается меньшим длины годного изделия. Вспомогательные преобразователи 3 и 5 расположены на расстоянии от измерительного преобразователя 3, большем зоны влияния краевого эффекта. Измерительный преобразователь 4 совместно с блоком 6 измерения служит для преобразования электромагнитных свойств изделия в электрические сигналы. Блок 9 измерения скорости определяет скорость движения изделия 13 и формирует сигнал Од. Формирователь 11 поля допуска предназна- . чен для формирования сигнала fg , значение которого соответствует допустимому изменению сигналов с выхода блока б измерения при прохождении через измерительный преобразователь 4 годного изделия. Блок 10 управления служит для формирования управляющих сигналов, поступаквдих в блок 6 измерения, формирователь 11поля допуска, арифметико-логический блок 9, частота поступления которых зависит от скорости движения изделия. Арифметико-логический блок 9 предназначен для арифметической об работки сигналов f,, поступающих с выхода блока 6 измерения, по адаптивному принципу, логического сравнения полученного сигнала с сигналом,поступающим из формирователя 7 поля допуска и формирования сигнала Ug на исполнительный механизм 8 при обнарух;ении дефекта на изделии. Исполнительный механизм 8 служит для отделения браковых изделий от годной продукции. . Блок 23 памяти предназначен для -хранения сигналов с выхода блока б измерения за время прохождения начала изделия 12 между вспомогательными преобразователями 3 и 5. Ариф.метический блок 24 предназначен для сложения сигналов, поступающих с выхода блока 6 измерения за время прохождения начала изделия 12 между вспомогательными преобразователя ми 3 и 5, с сигналами, поступающими также с выхода блока 6 измерения, но Sa время прохождения конца изделия 12 между вспомогательньами преоб разователями 3 и 5, вычитания из сигнала, полученного с выхода блока 6 сравнения в момент прохождения начала изделия через вспомогательный преобразователь 5, текущих значений сигналов, поступающих о вы хода блока б измерения за интервал времени, начинающийся моментом прохождения начала изделия через вспомогательный преобразователь 5 и заканчивающийся моментом прохождения конца изделия через вспомогательный преобразователь 3, и вычитания просуммированных сигналов, начиная с момента времени прохождения конца изделия 12 через вспомогательный преобразователь 3 и кончая моментом времени прохождения конца изделия 1 через вспомогательный преобразователь 5. , Блок 25 сравнения предназначен для логического сравнения сигнала, поступающего с выхода формирователя 11 поля допуска, с сигналом, поступающим с выхода арифметического блока 24 и, если последний больше первого, то блок 25 сравнения форми рует сигнал Ug, поступающий на исполнительный механизм 8. Регистры 26-28 предназначены для запоминания сигналов с выхода блока б измерения за время прохождения начала изделия 12 между вспомогательными преобразователями 3 и 5. Число h ре гистров определяется требуемой точностью контроля, т.е. числом изме - рений блока б измерения за-время прохождения начала изделия 12 между в спомогатель ными преобраз ов ателями 3 и 5. Регистр 29 предназначен для хранения информации с выхода из мерительного блока б в момент прохождения начала изделия 12 через вспомогательный преобразователь 5. Блоки 30-32 сложения предназначены для суммирования сигналов, поступаю щих с выхода блока б измерения во время прохождения начала и конца из делия между вспомогательными преобразователями 3 и 5} блок 33 вычитания - дЛя вычитания из сигнала, п,олученного р выхода блока 6 измерения в момент прохождения начала .изделия через вспомогательный преобразователь 5, значений сигнало |у полученных- за интервал времени,начинающийся моментом прохождения начала изделия 12 через вспомогательный преобразователь 5 и заканчивающийся MOMeHTONi прохождения конца изделия через вспомогательный преобразователь 3, или же вычитания сигналов из блоков 30-32 сложения, начиная с момента времени прохождения конца 12 изделия через вспомогательный преобразователь 3 и, кончая моментом времени прохождения конца изделия 12 через вспомогательный преобразователь 5. Управляемая схема 34 ИЛИ предназначена для пропас- кания на вычитающий вход блока 33 вычитания сигналов с выхода блока б измерения в интервал времени, начинающийся моментом прохождения на 1ала изделия 12 через вспомогательный преобразователь 5 и заканчивающийся моментом прохождения конца изделия через вспомогательный преобразоватеть 3 или же сигналов с выходов блоков 30-32 сложения, начиная с момента времени прохождения конца изделия 12 через вспомогательный преобразователь 3 и кончая моментом времени прохождения конца изделия 12 через вспомогательный преобразователь 5. Устройство работает следующим образом. В исходном состоянии выходы блока 10 управления, который может быть выполнен, например, как управ ляемый распределитель на1 -триггерах, заблокированы. Контролируемое изделие 12 движется по- трубопроводу 1 через вспомогательные преобразователи 2 и 3, на выходах которых формируются сигналы Ui и Оз . В блоке 9 измерения скорости, который может быть выполнен аналогично подобному блоку, описанному в прототипе, определяется интервал времени tn -tz; прохождения начала изделия 12 между вспомогательными преобразователя-. ми 2 и 3. По известному расстоянию и измеренному времени вычисляется скорость У движения изделия 12. Полученная скорость движения определяет число измерений блока б измерения. При изменении скорости движения изделия 12 изменяется частота сигнгшов, поступающих -с выхода блока 10 управления, оставляя общее число измерений неизменным. Далее изделие проходит через измерительный преобразователь 4. На его выходе формируется сигнал f, а на выходе блока б измерения формируется сигнал f7 Начиная с момента времени tj прохождения начала изделия через вспомогательный преобразователь 3, каждое измерение с выхода блока $ измерения поступает арифметико-логический блок 7 и запоминается там. Запоминание происходит до момента времени) прохождения начала изделия через,вспомогательный преобразователь 5. В момент времени t.j информация с выхода блока 6 измерения запоминается в регистре 29. В этот же момент времени происходит формирование сигнала f в формирователе 11 поля допуска. Фор.мирователь 11 поля допуска может . быть реализован аналогично блоку 6 измерения, но время измерения частоты измерительного преобразователя 4 берется на несколько порядков меньше в аависимости от требуемой надежности контроля.
Начиная с момента времени tj до момента времени 14 прохождения конца изделия 12 через вспомогательный преобразователь 3, устройство работает по следующему алгоритму. Каждое значение сигнала, поступающее с выхода блока 6 измерения, вычитается
В арифметико-логическом блоке 7 из значения сигнала, полученного с выхо|да блока 6 измерения в момент времени t3 , а разность сравнивается с сигналом б , поступающим с выхода формирователя 11 поля допуска. Если величина сигнала с выхода формирователя 11 поля допуска больше разности сигналов, то изделие 12 годное, если нет - то бракованное. Реализовать эти операции можно, например, с помощью блока 33 вычитания, выполненного на микросхеме К155ИПЗ, управляемой схемы 34 ИЛИ и блока 25 сравнения. В блоке 33 вычитания на первый входпоступает сигнал с выхода регистра 29, а на вычитающий вход - сигнал через управляемую схему 34 ИЛИ .с выхода блока 6 измерения. Разность сигналов поступает на первый вход блока-25 сравнения. На второй вход этого блока поступает сигнал с выхода Формирователя 11 поля допуска. БЛОК 25 сравнения может быть выполнен, например, на микро.схеме К155ИПЗ. Если изделие 12 годное, то сигналы fj, с выхода блока 6 измерения, проходящие через управляемую схему 34 ИЛИ, аналогичны сигналу в регистре 29. Если на изделии 12 обнаруживается деЛект, например, в момент времени ,с, , то сигнал с блока 33 вычитания больше сигнала с выхода формирователя 11 поля допуска, и на выходе блока 25 сравнения появляется сигнал и .
Начиная с момента времени ii, и кончая моментом времени t прохождения конца изделия 12 через вспомогательный преобразователь 5, алгоритм рабоЛл устройства следующий. Казкдо е измерение, начиная с момента времени iIf , складывается в арифметико-логическом блоке 7 по команде из блока Ю управления с соответствующим значением сигнала, начиная с момента времени tj , и суммарный сигнал вычитается из значения сигнала, по,лученного с выхода блока 6 измерения, в момент времени tj , а разность Сравнивается с сигналом, поступающим с выхода формирователя 11 поля допуска. У изделия 12 не имеющего дефектов на краю, суммарный сигнал .(по измерениям за интервал, времени 2. - t, и ti, - t(, соответственно имеет одинаковое значение с сигналом, измеренным в момент времени tj tfg) . Под соответствующим сложением понимается наложение сигналов в интерзале , на сигналы в интервале tj- . Сигнал,, полученный в момент времени t, складывается с сигналом, полученным в момент времени t . Сигнал, полученный в момент времени t ; , складывается с сигналом, полученным в момент времени tg , и так далее. Если у изделия дефект на краю то суммарный сигнал отличается от .сигнала, измеренного в момент времени 1з , больше, чем на величину поля допуска и на исполнительны механизм 8 поступает сигнал U .
Реализовать этот алгоритм можно, например, следующим образом. Сложение выполняется по командам блока 10 управления с помощью блоков 30-32 сложения, выполненный, например, на микросхеме К155ИПЗ. На первый вход блоков 30-32 сложения поступают сигналы с соответствующих регистров 2628, а на второй вход - соответствую щие сигналы с выхода блока 6 измерения. С блоков 30-32 сложения через управляемую схему .34 ИЛИ сигналы поступают на вычитающий вход блока 33 вычитания. Далее анализ аналогичен обработке сиг.налов в интервале времени tj - tj,. при прохождении концом изделия 12 вспомогательного преобразователя 5 выходы блока 10 управления заблокируются.
При изменении электромагнитных свойств материала, температуры, стабильности работы измерительного блока и д |угих мешающих Факторов изменяется значение сигналов ff , характер же их изменения остается неизменным.
Предлагаемый- дефектоскоп обладает повышенной надежностью контроля благодаря исключению вли.яния вариации электрофизических параметров контролируемых изделий на результаты контроля.
Auoff
ylff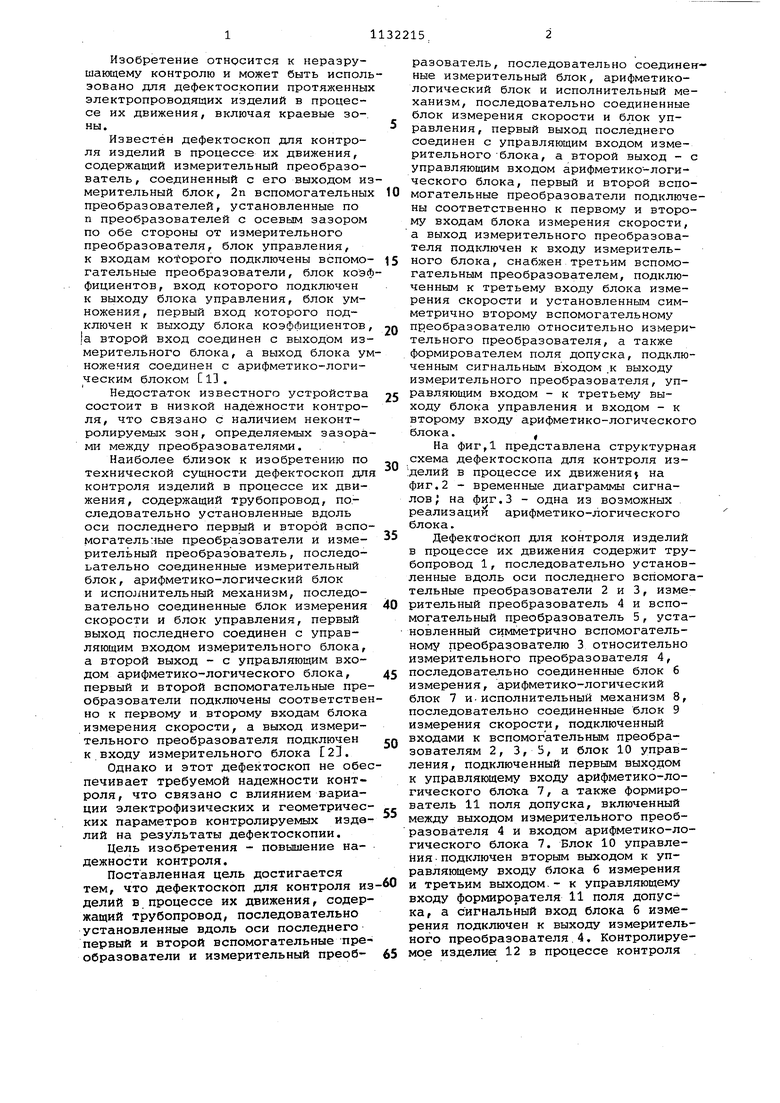
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической разбраковки электропроводных изделий по длине | 1981 |
|
SU983443A1 |
| Электромагнитный дефектоскоп для контроля коротких изделий | 1986 |
|
SU1325348A1 |
| Система для измерения скорости движения и расхода целлюлозной массы в гидропотоке | 1989 |
|
SU1680848A1 |
| Дефектоскоп для контроля изделий в процессе их движения | 1980 |
|
SU896536A1 |
| Электромагнитный дефектоскоп для контроля коротких изделий | 1983 |
|
SU1147967A1 |
| Многоэлементный электромагнитный дефектоскоп для контроля коротких изделий | 1984 |
|
SU1193569A1 |
| Электромагнитный дефектоскоп для контроля коротких изделий | 1981 |
|
SU1000893A1 |
| Устройство к дефектоскопу для блоки-РОВКи KPAEB издЕлия | 1979 |
|
SU836575A1 |
| Анализатор дефектов к ультразвуковому дефектоскопу | 1988 |
|
SU1585751A1 |
| СИСТЕМА ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 1990 |
|
RU2006942C1 |
ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ИЗДЕЛИЙ В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ, содержащий трубопровод, последовательно установленные вдоль оси последнего первый и второй вспомогательные пре:образователи.и измерительный преобразователь, последовательно соединенные блок измерения, арифметико-логический блок и исполнительный меха низм, последовательно соединенные блок измерения скорости и блок управления, первый выход последнего соединен с управляющий входом измерительного блока, а второй выход - с управляющим входом арифметико-логического блока, первый и второй вспомогательные преобразователи подключены соответственно к первому и второму входам блока измерения скорости, а выход измерительного преобразователя подключен к входу блока измерения, отличающийся тем, что, с целью повышения надежности контроля, он снабжен третьим вспомогательным преобразователем, подключенным к третьему входу блока измерения скорости и установленным симметрично второму вспомогательному преобразоватзлю относительно измерительноS го преобразователя, а также формиро-вателем поля допуска, подключенным сигнальным входом к выходу измерительного преобразователя, управляющим входом - к третьему выходу бло8 ка управления и выходом - к второму входу арифметико-логического блока. СО ю ю сд
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дефектоскоп для контроля изделий в процессе их движения | 1980 |
|
SU896536A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
