Изобретение относится к транспортировке грузов из ферромагнитных материалов грузозахватными устройствами на постоянных магнитах.
Известно грузозахватное устройство, содержащее подвижный и неподвижный магнитные блоки и соединенную кинематически с подвижным блоком рукоятку 1.
Однако в известном устройстве не предусмотрен контроль силы притяжения каждого конкретного груза к грузозахватному устройству, в результате чего при переносе грузов возможность возникновения динамических нагрузок, влияющих на силу притяжения груза к грузозахватному устройству, может привести к отрыву груза. Таким образом, безопасность транспортировки не обеспечивается.
Цель изобретения - повыщение безопасности в работе.
Поставленная цель достигается тем, что грузозахватное устройство, содержащее подвижный и неподвижный магнитные блоки и соединенную кинематически с подвижным блоком рукоятку, снабжено немагнитным корпусом, расположенными внутри корпуса магнитом и полюсниками, шарнирно связанным с корпусом и жестко с рукояткой якорем, установленным с возможностью взаимодействия с полюсниками, и шунтом, установленным в корпусе с возможностью перемещения вдоль полюсников и фиксации в заданном положении.
На чертежах представлен вариант конструктивного исполнения грузозахватного устройства.
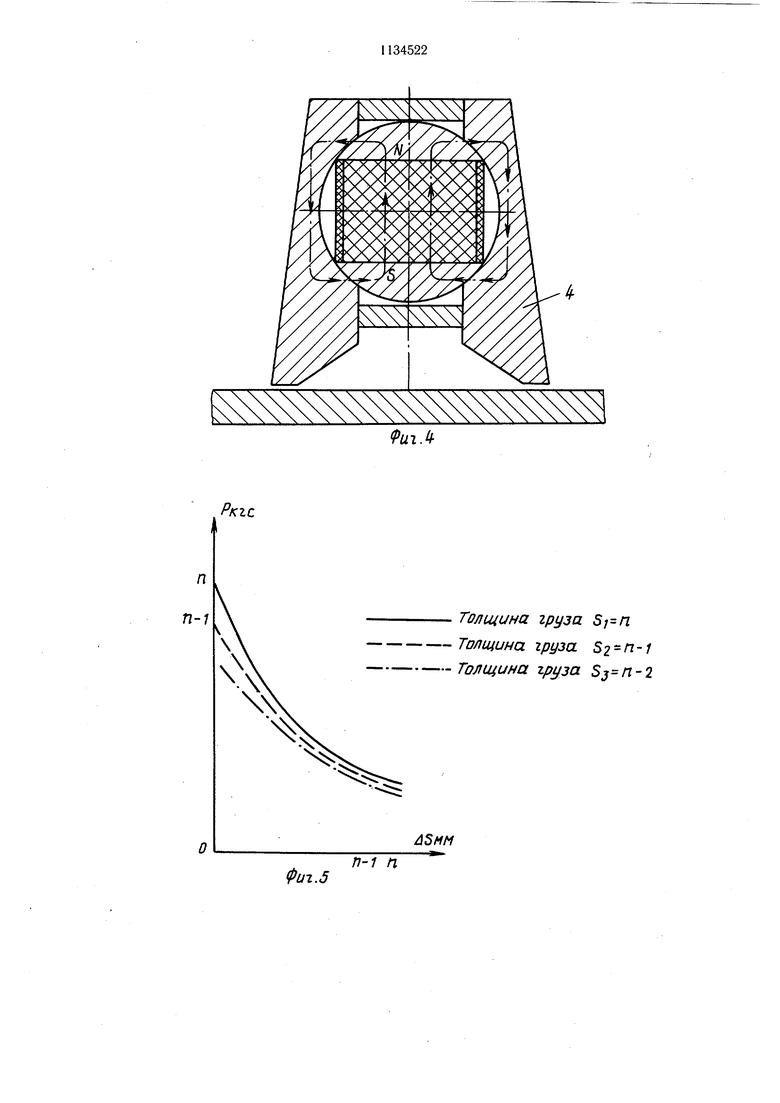
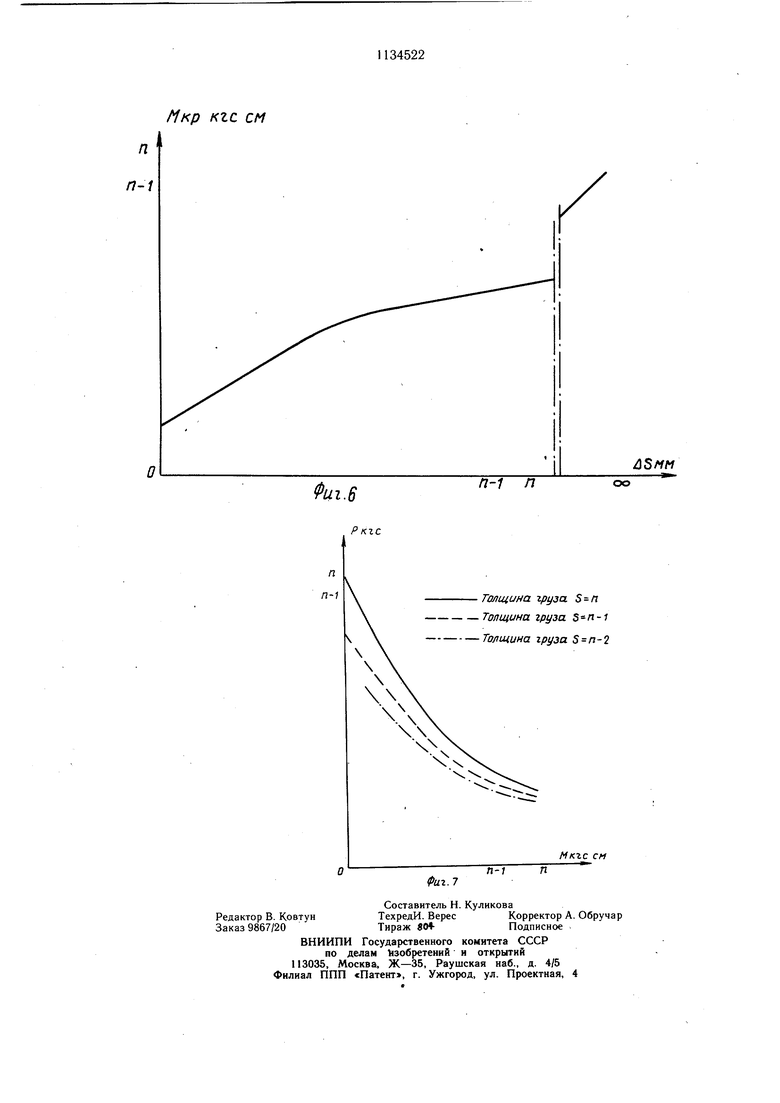
На фиг. 1 представлено грузозахватное устройство на постоянных магнитах, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - схема магнитной системы грузозахватного устройства в положении «Включено ; на фиг. 4 - то же, в положении «Выключено ; на фиг. 5 - график зависимости величины силы притяжения груза к грузозахватному устройству Р (кгс) от величины рабочего зазора Д5 (мм) для грузов различной величины; на фиг. 6 - график зависимости величины усилия перемещения подвижного магнитного блока Mi (кгс-см) от величины рабочего зазора Д$. (мм) для грузов различной толщины; на фиг. 7 - график зависимости величины усилия перемещения подвижного магнитного блока Мкр.. (кгс-см) от величины силы притяжения груза грузозахватным устройством Р (кгс) для грузов различной толщины.
Грузозахватное устройство состоит из неподвижного блока 1, подвижного магнитного блока 2, на валу 3 которого жестко укреплен механизм ручного управления 4, состоящий из корпуса 5, выполненного из немагнитного материала, внутри которого на клею вмонтированы магнит 6 и два полюсника 7, якоря 8, жестко соединенного с рукояткой 9 посредством оси 10, шарнирно связанного с корпусом 5. На корпусе 5 установлен шунт 11 с возможностью перемещения в направляющих корпуса 5 вдоль полюсников 7, фиксируемый винтом 12.
Грузозахватное устройство работает следующим образом.
Устройство устанавливают на груз и настраивают механизм управления на величину предельного крутящего момента, при котором он срабатывает согласно графикам, изображенным на фиг. 5, б и 7. Эту настройку производят установкой шунта 11 в заданном положении относительно полюсников 7; его вручную перемещают по направляющему пазу корпуса 5. При этом поворотном рукоятки 9 определяют возможность включения магнитной системы, т. е. осуществляется контроль надежности притяжения груза грузозахват. ным устройством. После проведения настройки шунт 11 закрепляют в выбранном положении винтом 12.
Сущность контроля основывается на следующих зависимостях: величина силы
5 притяжения груза грузозахватным устройством уменьщается с увеличением величины рабочего зазора и уменьшением толщины материала транспортируемого груза (фиг. 5); величина усилия перемещения подвижного магнитного блока 2 увеличивается с ростом величины рабочего зазора и уменьшением толщины материала транспортируемого груза (фиг. 6).
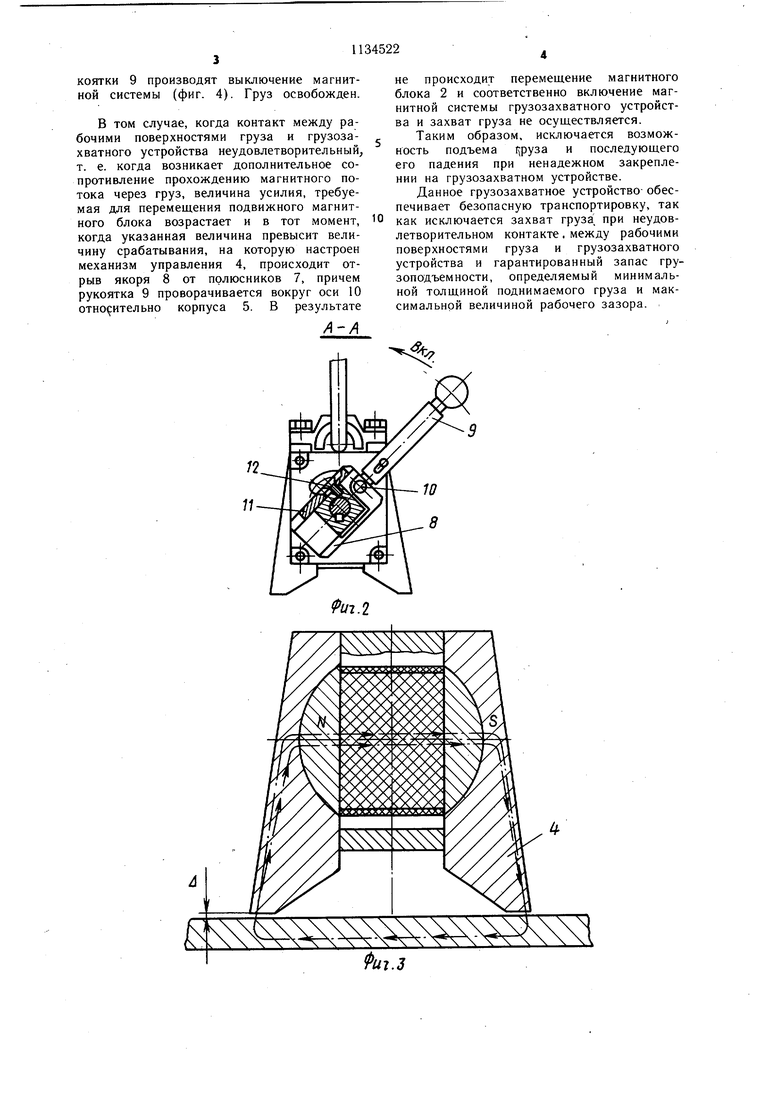
. Последнее объясняется тем, что в положении «Выключено магнитный поток свободно замыкается внутри грузозахватного
устройства (фиг. 4).
При перемещении подвижного магнитного блока 2 из положения «Выключено в положение «Включено магнитный поток при отсутствии сопротивления замыкается
0 через груз и не препятствует повороту подвижного магнитного блока 2, причем наличие сопротивления ведет к возрастанию необходимого усилия для поворота блока 2.
Таким образом, величину силы притяжения груза контролируют величиной усилия перемещения подвижного магнитного блока при включении грузозахватного устройства. В том случае, когда контакт между рабочими поверхностями груза и грузозахватного устройства удовлетворительный и соответственно величина сопротивления прохождения магнитного потока через груз равна или меньше номинальной, при повороте рукоятки 9 происходит перемещение подвижного магнитного блока 2 устройства и замыкание магнитного потока через груз (фиг. 3). После этого осуществляется подъем груза и его транспортировка к месту назначения. Затем поворотом рукоятки 9 производят выключение магнитной системы (фиг. 4). Груз освобожден. В том случае, когда контакт между рабочими поверхностями груза и грузозахватного устройства неудовлетворительный, т. е. когда возникает дополнительное сопротивление прохождению магнитного потока через груз, величина усилия, требуемая для перемещения подвижного магнитного блока возрастает и в тот момент, когда указанная величина превысит величину срабатывания, на которую настроен механизм управления 4, происходит отрыв якоря 8 от полюсников 7, причем рукоятка 9 проворачивается вокруг оси 10 относительно корпуса 5. В результате не происходит перемещение магнитного блока 2 и соответственно включение магнитной системы грузозахватного устройства и захват груза не осуществляется. Таким образом, исключается возможность подъема 1;руза и последующего его падения при ненадежном закреплении на грузозахватном устройстве. Данное грузозахватное устройство обеспечивает безопасную транспортировку, так как исключается захват груза при неудовлетворительном контакте. между рабочими поверхностями груза и грузозахватного устройства и гарантированный запас грузоподъемности, определяемый минимальной толщиной поднимаемого груза и максимальной величиной рабочего зазора.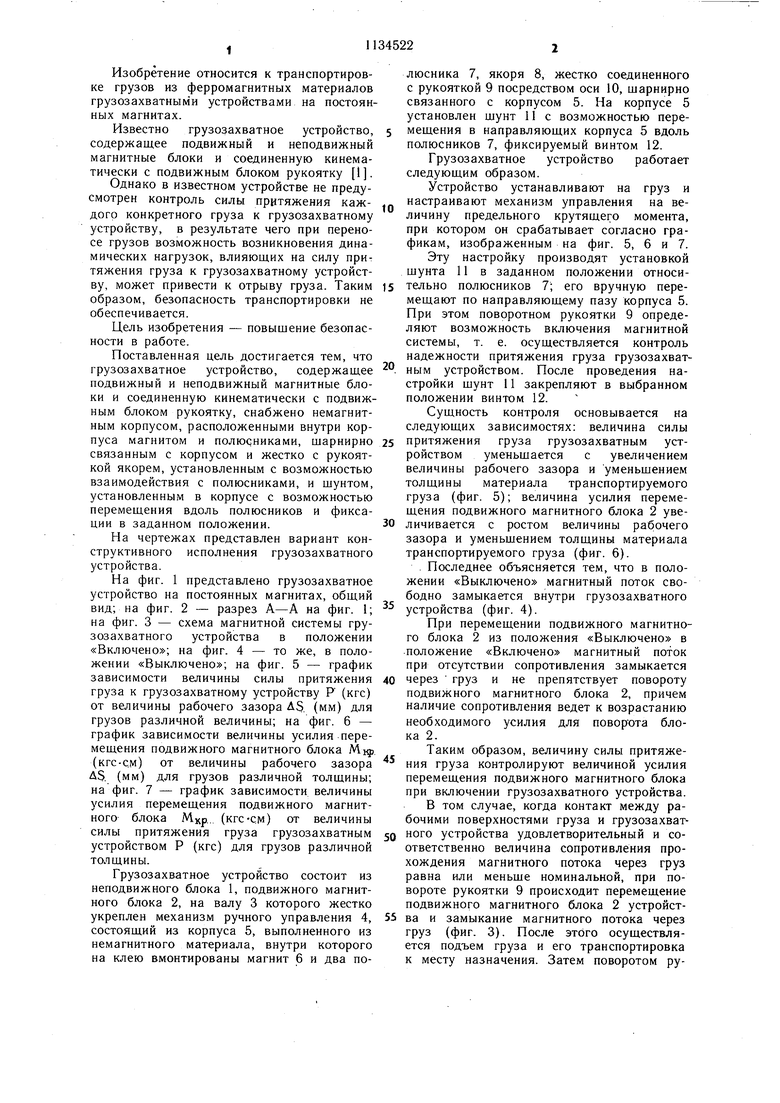
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО НА ПОСТОЯННЫХ МАГНИТАХ | 2010 |
|
RU2452681C1 |
| Магнитная разноименнополюсная плита | 1982 |
|
SU1077751A1 |
| МАГНИТНОЕ ПОДЪЕМНОЕ УСТРОЙСТВО | 1991 |
|
RU2014279C1 |
| Грузоподъемное магнитное устройство | 1982 |
|
SU1096186A1 |
| ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ | 2009 |
|
RU2400857C1 |
| Автоматический выключатель | 1990 |
|
SU1707645A1 |
| РЕЛЕ ЭЛЕКТРОМАГНИТНОЕ | 2010 |
|
RU2435245C1 |
| ИМПУЛЬСНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 1997 |
|
RU2122177C1 |
| Грузозахватное магнитное устройство | 1987 |
|
SU1418253A1 |
| Вертикально-замкнутый конвейер | 1977 |
|
SU662440A1 |
ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО, соедржащее подвижный и неподвижный магнитные блоки и соединенную кинематически с подвижным блоком рукоятку, отличающееся тем, что, с целью повышения безопасности в работе, оно снабжено немагнитным корпусом, расположенными внутри корпуса магнитом и полюсниками, шарнирно связанным с корпусом и жестко с рукояткой якорем, установленным с возможностью взаимодействия с полюсниками, и шунтом, установленным в корпусе с возможностью перемещения вдоль полюсников и фиксации в заданном положении. i ОО 4 сл tc to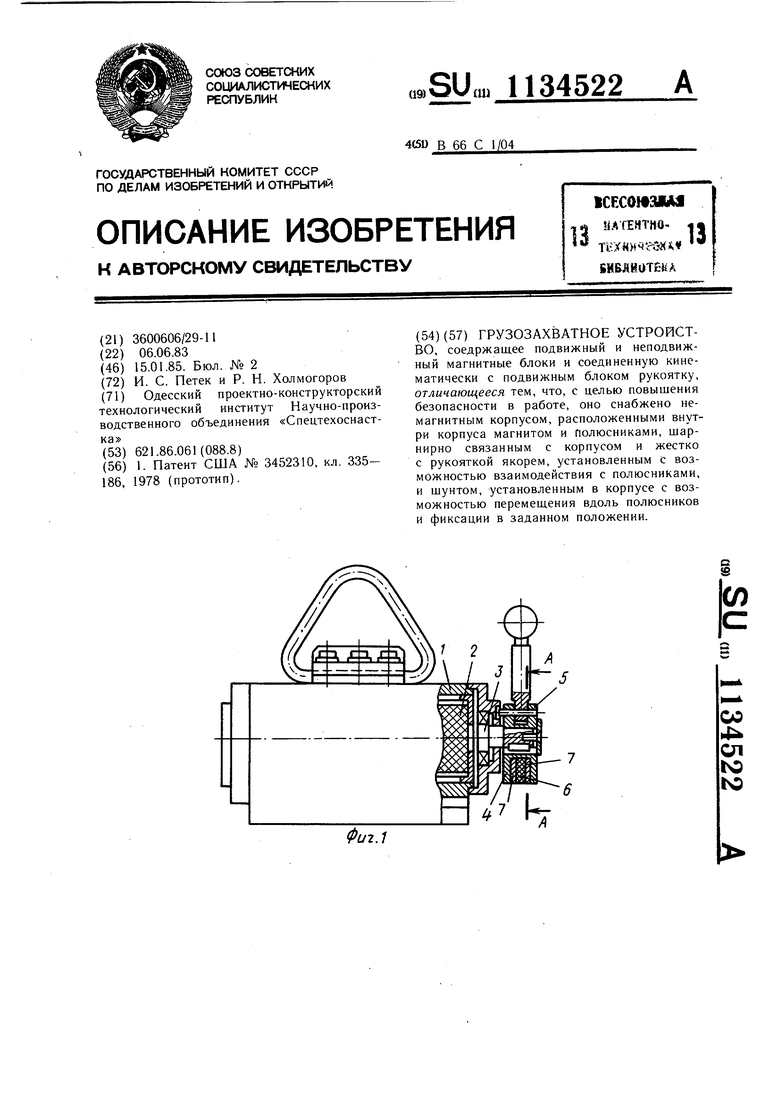
п П-1
Фиг.5
Толщина груза
Толщина груза. S2-n-f
Толщина груза
П-1 п
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3452310, кл | |||
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ РАСХОДА ПУЛЬПЫ | 0 |
|
SU335186A1 |
