Изобретение относится к магнитной технологической оснастке, в частности к грузоподъемным устройствам, и может быть использовано для подъема и переноса грузов из ферромагнитных материалов различных отраслях промышленности.
Известно «Магнитное подъемное устройство», содержащее П-образный корпус с крышкой, выполненный из магнитопроводного материала, постоянные магниты, расположенные на боковых стенках корпуса и обращенные друг к другу одноименными полюсами, полюсный наконечник, установленный между постоянными магнитами с возможностью перемещения в горизонтальной плоскости и соединенный с приводом его перемещения при помощи оси и тяги, расположенной в крышке корпуса, основание, включающее центральный полюсник и боковые прокладки, при этом полюсный наконечник на верхней и нижней гранях, крышка корпуса на нижней поверхности и центральный полюсник на верхней поверхности выполнены с расположенными на равном расстоянии друг от друга поперечными пазами с шириной, превышающей расстояние между ними, и пазы на полюсном наконечнике расположены симметрично горизонтальной плоскости, а пазы на центральном полюснике смещены относительно пазов крышки на полшага, при этом центральный полюсник установлен с возможностью вертикального перемещения и фиксации в заданном положении и снабжен боковыми вертикальными выступами, охватывающими полюсный наконечник, причем глубина пазов на нижней грани полюсного наконечника превышает высоту боковых выступов на центральном полюснике.
Патент РФ №2014279, МКИ В66С 1/04, дата публ. 1994.06.15.
Известно «Магнитное подъемное устройство», содержащее корпус, состоящий из двух стенок - передней и задней, верхней крышки с серьгой, предназначенной для зацепления с подъемным механизмом, расположенные в нем пара неподвижных постоянных магнитов и основной ротор, жестко установленный на оси с возможностью поворота между неподвижными магнитами, верхняя крышка выполнена из немагнитного материала, на передней стенке расположена поворотная деталь с рукояткой, связанная с осью ротора, ротор содержит два постоянных магнита, ориентированных относительно неподвижных постоянных магнитов таким образом, что их магнитная полярность при повороте ротора либо совпадает, что соответствует положению «Включено», либо различна, что соответствует положению «Выключено».
Патент Кореи на ПМ №56701, МКИ В66С 1/04; дата публ. N 91-1064.
«Магнитное подъемное устройство», содержащее корпус, состоящий из двух стенок - передней и задней, верхней крышки с серьгой, предназначенной для зацепления с подъемным механизмом, расположенную в нем пару неподвижных постоянных магнитов и основной ротор, жестко установленный на оси с возможностью поворота между неподвижными постоянными магнитами, верхняя крышка выполнена из немагнитного материала, на передней стенке расположена поворотная деталь с рукояткой, связанная с осью ротора, ротор содержит два постоянных магнита, ориентированных относительно неподвижных постоянных магнитов таким образом, что их магнитная полярность при повороте ротора либо совпадает, что соответствует положению «Включено», либо различна, что соответствует положению «Выключено», при этом оно снабжено двумя боковыми стенками с отгибами в верхней части, выполненными из немагнитного материала с отверстиями под винты, магнитными элементами, каждый из которых выполнен в виде двух тел из магнитного материала, между которыми расположен центральный стержень из немагнитного материала, сплавленный с ними, дополнительными роторами, опорами из немагнитного материала для ротора и постоянных магнитов, винтами и шпильками, дополнительные роторы выполнены аналогично основному, каждая пара неподвижных постоянных магнитов и ротор установлены на одной опоре, в нижней части каждой опоры выполнены отверстия под шпильки, каждый магнитный элемент выполнен с центральным отверстием, а на боковых стенках магнитного элемента выполнены отверстия под винты таким образом, что сопрягаются с аналогичными отверстиями в боковых стенках с отгибами, каждый ротор выполнен с граненным отверстием, а ось ротора выполнена граненой так, что ее поперечное сечение аналогично форме граненого отверстия, указанные детали образуют по крайней мере три управляемых магнитных группы, уложенных в пакет одна на другую, причем каждая из магнитных групп включает в себя магнитный элемент и опору с неподвижными постоянными магнитами и ротором, роторы всех магнитных групп установлены на одной оси.
Патент РФ №2120910, МКИ В66С 1/04, H01F 7/00, дата публ. 1998.10.27
Наиболее близким техническим решением к предлагаемому изобретению является «Магнитное грузозахватное устройство», включающее корпус, с грузозахватной петлей на верхней крышке, рукоятку переключения устройства, расположенные в корпусе магнитные элементы из неподвижных постоянных магнитов и подвижных, компоновка которых выполнена на горизонтальном валу, причем последние ориентированы относительно неподвижных магнитов корпуса таким образом, что их магнитная полярность при повороте магнитной системы либо совпадает, что соответствует положению «Включено», либо различна, что соответствует положению «Выключено», при этом компоновка неподвижной магнитной системы в корпусе выполнена из двух жестко соединенных частей, снабжена основанием из магнитного материала с выемкой для груза, при этом ось симметрии горизонтального вала, расположена по оси симметрии корпуса и параллельна рабочей поверхности корпуса, а поверхность вала, с расположенной в нем магнитной системой, снабжена продольным пазом, начало и конец которого смещены относительно друг друга и горизонтальной оси на угол 5°, который обеспечивает плавное перемещение рукоятки переключения устройства, основание рукоятки в свою очередь расположено в сквозном отверстии на конце горизонтального вала и снабжено пружиной, позволяющей осуществлять переключение рукоятки в положения «Включено» и «Выключено», причем снаружи корпуса на стороне расположения рукоятки переключения устройства выполнен упорный элемент, фиксирующий угол поворота рукоятки вместе с валом, равный 165°.
Патент РФ на ПМ №78780, МКИ В66С 1/04; дата публ. 2008.12.10.
К техническому результату относится повышение надежности устройства и улучшение безопасности условий труда при работе устройства за счет обеспечения автоматического захвата грузов из ферромагнитных материалов, путем взаимодействия системы из двух подвижных рычагов, взаимодействующих через гибкую кинематическую связь с валами магнитной системы устройства, что в свою очередь исключает нахождение людей в зоне перемещения грузов.
Технический результат достигается благодаря тому, что грузозахватное устройство на постоянных магнитах включает грузозахватную петлю, корпус с плитой, на которой расположена магнитная система. Магнитная система содержит несколько магнитных блоков с магнитными элементами из неподвижных и подвижных постоянных магнитов. Компоновка постоянных магнитов выполнена на горизонтальных валах, количество которых совпадает с количеством магнитных блоков. Горизонтальные валы ориентированы относительно неподвижных магнитов корпуса таким образом, что их магнитная полярность при повороте магнитной системы либо совпадает, что соответствует положению «Включено», либо различна, что соответствует положению «Выключено». Компоновка неподвижной магнитной системы в корпусе выполнена из двух жестко соединенных частей, при этом ось симметрии горизонтальных валов расположена по оси симметрии корпуса и параллельна рабочей поверхности корпуса. Кроме того, корпус устройства снабжен двумя подвижными рычагами, которые через продольные пазы связаны между собой и грузоподъемной петлей ее осью, причем один из рычагов основной, а второй вспомогательный. Свободный конец вспомогательного рычага установлен на оси кронштейна, жестко закрепленного на плите корпуса. Свободный конец основного рычага снабжен ведущим валом, на котором расположено храповое колесо, связанное с ведущей звездочкой. В свою очередь на основном рычаге закреплена собачка храпового колеса. На горизонтальных валах магнитной системы также установлены звездочки, которые связаны гибкой кинематической связью между собой и ведущей звездочкой основного рычага. На корпусе закреплен подпружиненный фиксатор, ограничивающий вращение храпового колеса, а сверху в центре плиты корпуса установлен упор, служащий для фиксирования рычагов в крайнем нижнем положении.
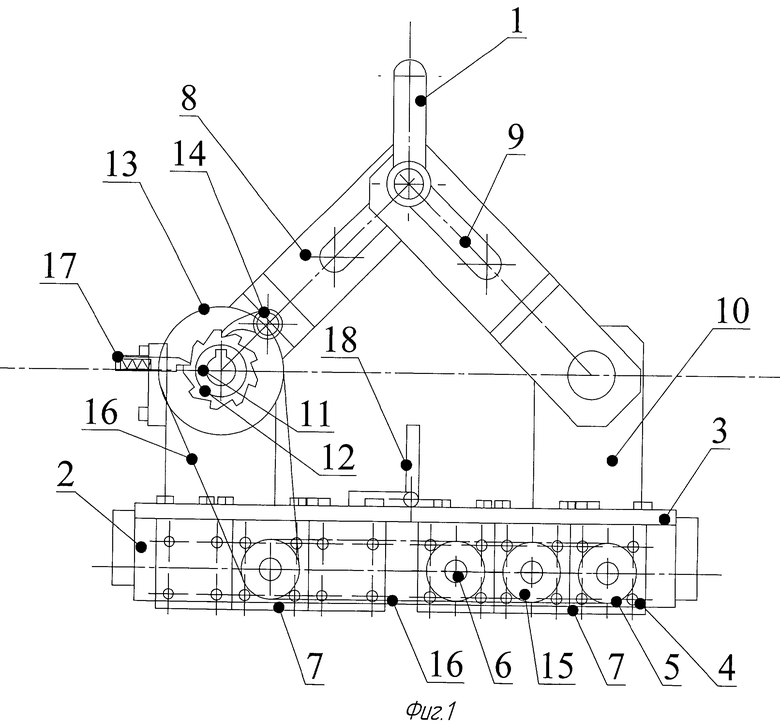
На фиг.1 - схема общего вида грузозахватного устройства на постоянных магнитах.
Согласно фиг.1 грузозахватное устройство на постоянных магнитах содержит грузозахватную петлю 1, корпус 2 с плитой 3, на которой расположена магнитная система 4, включающая несколько магнитных блоков 5, содержащих магнитные элементы из неподвижных и подвижных постоянных магнитов, компоновка последних выполнена на горизонтальных валах 6. Компоновка неподвижной магнитной системы в корпусе 2 выполнена из двух жестко соединенных частей, снабжена основанием 7 из магнитного материала с выемкой для груза, при этом ось симметрии горизонтальных валов 6 расположена по оси симметрии корпуса 2 и параллельна рабочей поверхности корпуса 2. Корпус 2 снабжен двумя подвижными рычагами 8 и 9, которые через продольные пазы связаны между собой и грузоподъемной петлей 1 ее осью, причем один из рычагов основной 8, а второй вспомогательный 9, при этом свободный конец вспомогательного рычага 9 установлен на оси кронштейна 10, жестко закрепленного на корпусе 2 устройства, а свободный конец основного рычага 8 снабжен ведущим валом 11, на котором расположено храповое колесо 12, связанное с ведущей звездочкой 13, в свою очередь на основном рычаге 8 закреплена собачка 14 храпового колеса 12. На горизонтальных валах 6 магнитной системы 4 также установлены звездочки 15, которые связаны гибкой кинематической связью 16 между собой и ведущей звездочкой 13 основного рычага 8. На корпусе 2 закреплен подпружиненный фиксатор 17, ограничивающий вращение храпового колеса 12, а сверху плиты 3 в центре установлен упор 18, служащий для фиксирования рычагов 8 и 9 в крайнем нижнем положении.
Грузозахватное устройство на постоянных магнитах работает следующим образом: в исходном положении магнитная система 4 включена. При опускании грузозахватного устройства на ферромагнитный груз грузоподъемная петля 1 опускается вниз, увлекая за собой подвижные рычаги 8 и 9. При опускании ведущего рычага 8 собачка 14 переходит на один зуб храпового колеса 12, при этом храповое колесо 12 зафиксировано фиксатором 17. Рычаги 8 и 9 опускаются до соприкосновения с упором 18. При подъеме собачка 14 толкает зуб храпового колеса 12, вращая последний до тех пор, пока рычаги 8 и 9 не займут крайнее верхнее положение. Геометрия корпуса 2 и рычагов 8 и 9 выполнена таким образом, что рычаги имеют возможность поворачиваться на угол 45°. Так как ведущая звездочка 13 имеет зубьев в два раза больше, чем ведомые звездочки 15 магнитных блоков магнитной системы 4, то горизонтальные валы магнитных блоков магнитной системы 4, периодически поворачиваются на 90°, то включая, то выключая магнитную систему, при каждом ходе рычагов 8 и 9 вверх.
Предложенное в качестве изобретения устройство позволяет улучшить безопасность условий труда и обеспечить автоматический захват грузов из ферромагнитных материалов, что в свою очередь позволяет исключить нахождение людей в зоне перемещения грузов.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНАЯ ТРАВЕРСА С ЭЛЕКТРОПОСТОЯННЫМИ МАГНИТНЫМИ ЗАХВАТАМИ | 2015 |
|
RU2582742C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2015 |
|
RU2587386C1 |
| Магнитное грузозахватное устройство | 1989 |
|
SU1763341A1 |
| Грузозахватное устройство | 1984 |
|
SU1294745A1 |
| Захватное устройство для изделий с отверстиями | 1979 |
|
SU931658A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2014 |
|
RU2572544C1 |
| Грузозахватное устройство | 1991 |
|
SU1813690A1 |
| МАГНИТНЫЙ СЕПАРАТОР | 2007 |
|
RU2345841C1 |
| Грузозахватное устройство | 1983 |
|
SU1134522A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2011 |
|
RU2463239C1 |
Изобретение относится к грузоподъемным устройствам и может быть использовано для подъема и переноса грузов из ферромагнитных материалов в различных отраслях промышленности. Захват грузов осуществляется путем взаимодействия системы из двух подвижных рычагов, взаимодействующих через гибкую кинематическую связь с валами магнитной системы устройства. Грузозахватное устройство на постоянных магнитах включает грузозахватную петлю, корпус с плитой, на которой расположена магнитная система, содержащая несколько магнитных блоков из неподвижных и подвижных постоянных магнитов. Компоновка постоянных магнитов выполнена на горизонтальных валах, количество которых совпадает с количеством магнитных блоков. Корпус устройства снабжен двумя подвижными рычагами, которые через продольные пазы связаны между собой и грузоподъемной петлей ее осью. На горизонтальных валах магнитной системы установлены звездочки, которые связаны гибкой кинематической связью между собой и ведущей звездочкой основного рычага. На корпусе закреплен подпружиненный фиксатор, ограничивающий вращение храпового колеса, а сверху в центре плиты корпуса установлен упор, служащий для фиксирования рычагов в крайнем нижнем положении. Технический результат заключается в повышении надежности устройства и улучшении безопасности условий труда при работе. 1 ил.
Грузозахватное устройство на постоянных магнитах, включающее грузозахватную петлю, корпус с плитой, на которой расположена магнитная система, включающая несколько магнитных блоков, содержащих магнитные элементы из неподвижных и подвижных постоянных магнитов, компоновка последних выполнена на горизонтальных валах, количество которых совпадает с количеством магнитных блоков, при этом горизонтальные валы ориентированы относительно неподвижных магнитов корпуса таким образом, что их магнитная полярность при повороте магнитной системы либо совпадает, что соответствует положению «Включено», либо различна, что соответствует положению «Выключено», компоновка неподвижной магнитной системы в корпусе выполнена из двух жестко соединенных частей, при этом ось симметрии горизонтальных валов, расположена по оси симметрии корпуса и параллельна его рабочей поверхности, отличающееся тем, что корпус устройства снабжен двумя подвижными рычагами, которые через продольные пазы связаны между собой и грузоподъемной петлей ее осью, причем один из рычагов основной, а второй вспомогательный, при этом свободный конец вспомогательного рычага установлен на оси кронштейна, жестко закрепленного на плите корпуса, а свободный конец основного рычага снабжен ведущим валом, на котором расположено храповое колесо, связанное с ведущей звездочкой, в свою очередь на основном рычаге закреплена собачка храпового колеса, при этом на горизонтальных валах магнитной системы также установлены звездочки, которые связаны гибкой кинематической связью между собой и ведущей звездочкой основного рычага, кроме того, на корпусе закреплен подпружиненный фиксатор, ограничивающий вращение храпового колеса, а сверху в центре плиты корпуса установлен упор, служащий для фиксирования рычагов в крайнем нижнем положении.
| Магнитное грузозахватное устройство | 1988 |
|
SU1601065A1 |
| МАГНИТНОЕ ПОДЪЕМНОЕ УСТРОЙСТВО | 1991 |
|
RU2014279C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1992 |
|
RU2049036C1 |
| ДЕМОНТАЖНОЕ УСТРОЙСТВО ДЛЯ СТРОПА, ПРЕДНАЗНАЧЕННОГО ДЛЯ ПОДЪЕМА ТЯЖЕЛОГО ГРУЗА | 2002 |
|
RU2291832C2 |

