Изобретение относится к оборудованию подводного бурения плавучих буровых установок, в частности к ус,тановкам для кспытания гидропневмоnopmHeBbik натяжителей морского стояка и на правляющих канатов.
Извест.а установка для исследования износостойких поршневых насосов, включающая два рабочих цилиндра |поршни которых связаны с приводом через шатуны и коленчатый вал, и нагрузочное устройство для создания боковой нагрузки в каждой паре ij .
К недостаткам конструкции относятся трудность обеспечения перемещения штоков испытываемых устройств с заданными параметрами движения, а также сложность изменения указанных параметров в процессе испытания.
Наиболее близким к изобретению по технической сущности и достигаемому результату является стенд для испытания гидропневмопоршневых натяжителей плавучих буровьгх установок, содержащий стойку для крепления пары гидропневмоцилиндров, пневмоаккумуляторы, гидропривод с блоком программного управле ния и канаты для кинематической связи штоков цилиндров 2} . Недостатком этого стенда является отличие условий испытаний натяжителей по сравнению с эксплуатационными из-за того, что перемещение штоков натяжителей производится путем подачи давления в штоковую полость, а не натяжением каната. Цель изобретения - приближение испытаний к условиям эксплуатации. Указанная цель достигается тем, что стенд для испытания гидропневмопоршневых натяжителей плавучих буровых установок, содержащий стойку для крепления пары гидропневмоцилиндров, пневмоаккумуляторы, гидропривод с бло ком програьшного управления и канаты для кинематической связи через полиспасную систему штоков гидропневмоцилиндров, снабжен барабаном, жестко закрепленным на валу гидропривода, канат витками уложен на барабане,причем гидропривод имеет систему синхронии зации его с перемещением штоков гидро пневмоцилиндров. При этом блок программного управле ния гидропривода имеет электродвигатель постоянного тока и кривошипнокулисный механизм, ползун которого посредством подвижного пальца соединен с рукояткой управления насосом.
Система синхронизации включает датчик среднего положения штоков гидро пневмоцилиндров и датчик максимальной производительности насосов, которые соединены с блоком реле и- через резисторы включены в цепь электродвигателя.
На фиг. 1 изображен предлагаемый стенд, общий вид; на фиг. 2 - блок программного управления гидроприводом} на фиг. 3 - сечение А-А на фиг.2 (узел соединения ползуна кривошипно кулисного механизма с рукояткой управления насосом); на фиг, 4 - кривошип кривошипно-кулисного механизма, на фиг. 5 - функциональная схема системы синхронизации стенда; на фиг. 6 схема испытания натяжителей штоками вверх; на фиг. 7 - то же, штоками вниз.
Стенд для испытания гидропневмопоршневых натяжителей плавучих Дуровых установок содержит стойку 1, на которой смонтирован барабан 2, жестко закрепленный на валу 3 гидропривоДа 4. Гидропривод имеет редуктор 5, гидромотор 6, насос 7 переменной производительности, блок 8 программного управления и блок 9 подпитки (фиг. 1). Блок 8 программного управления гидроприводом состоит из электродвигателя 10 постоянного тока с редуктором 11 и кривошипно-кулисного механизма 12, соединяющего электродвигатель 10 с насосом 7 переменной производительности (фиг. 2). Кривошипно-кулисный механизм содержит кривошип 13, закрепленный на ведомом валу редуктора 11. Палец кривошипа жестко соединен с подвижным камнем 14, перемещающимся в направляющих например вертикальных, ползуна 15, в свою очередь перемещающегося по горизонтальным направлякяцим 16. Ползун имеет подпружиненный палец 17, который в выдвинутом положении входит в паз 18 рукоятки 19, которая закреплена на валу 20 люльки насоса 7.Фик-: сация пальца 1 7 в вьщвинутое или втянутое положение производится стержнем 21 (фиг, 3), перемещающимся в фигурном пазу. По обе стор:оны от рукоятки Т9 установлены конечные выключатели 22 и 23, управляющие золотником, изменяющим направление потока жидкости, поступающей от насоса 7 к гидромотору 6. Блок имеет датчик 24 максимальной производительности насоса, с которым взаимодействует кривошип 13. Величина плеча А кривошипа 13 может быть изменена (фиг, 4), для чего в корпусе кривошипа выполнен паз, в котором установлен палец 25, закрепленный на винте 26, фиксируемом гайкой 27. Гидропривод снабжен системой синхронизации его работы и перемещения штоков испытываемых гидропневмоцилиНДРов, которая включает (фиг.5) датчик 28 среднего положения штоков гидропневмоцилиндров, закрепленньй на одном из гидропневмоцилиндров 29, причем последний при испытании закрей ляется на стойке 1 .Датчик 28 электрически связан с блоком 30 реле, с кото- . рым также связан датчик 24 максимальной производительности насоса. Блок 30 через резисторы 31 подключен в цеп электродвигателя 10 блока 8 программного управления насосом 7. Стенд имеет пневмоаккумуляторы 32, которые посредством трубопроводов 33 и 34 через пульты 35 и 36 управления трубопроводы 37 и 38 соединены с испытуемыми гидропневмоцилиндрами 29. Для управления стендом имеется пульт 39. Подготовка стенда и его работа осу ществляются следующим образом. При испытании натяжителей плавучих буровых установок, работающих штоками 40 вверх (фиг. 6), пара натяжителей устанавливается симметрично относительно стойки 1 на соответствзпмцие места крепления. Канат 41 одним концо закреплен на неподвижном основании 42 одного из натяжителей с помощью прижима 43, двумя-тремя витками огибает нёподвижный ролик 44 этого натяжителя запасовывается на подвижные и неподвижные блоки полиспастной системы дан ного натяжителя, затем, сходя с одног из неподвижных блоков, не менее чем двумя витками огибает жестко закрепленный на валу гидропривода барабан 2 заходит на один из неподвижных ролико 44 второго натяжителя, запасовывается на его полиспастную систему и закрепляется другим прижимом 43. Таким образом, оба натяжителя оказываются сое диненными одним канатом, конщ.1 которого закреплены на их неподвижных основаниях 42. При этом длина каната 41 должна быть такой, чтобы штоки 40 натяжителей находились в среднем положении (вьщвинуты на половину длины хода). Воздушные полости низкого 45 1 0 и высокого 46 давления натяжителей соединяются с пультом 35 управления. При испытании натяжителей направляющих канатдв, работанмцих штоками 47 вниз (фиг. 7), неподвижные основания 48 крепятся к проушине 49 стойки 1. Канат 50 одним концом неподвижно закрепляется в зажиме 51, запасовывается на неподвижные и подвижные ролики полиспастной системы натяжителя, сходит с одного из неподвижных роликов этого натяжителя, огибает один из обводных роликов 52 и направляется вниз к жестко закрепленному на валу гидро,привода барабану 2, охватывает его не менее чем двумя витками, затем подлимается вверх, огибает второй обводной ролик 52, заходит .на один из неподвижных роликов второго натяжителя, запасовьшается на его полиспастную систему, сходит с другого ролика этого натяжителя и закрепляется вторым концом в другом зажиме 51. Длина каната 50 должна быть такой, чтобы штоки 47 находились в среднем положении. Воз)5Ушные полости высокого 53 и низкого 54 давления соединяются с пультом 36 управления. При включении насоса 7 (фиг.1) переменный по величине и направлению поток гидравлической жидкости подается к гидромотору 6, который через редуктор 5 и вал 3 приводит во вращение барабан 2. При вращении барабана запасованный на нем канат 41 .или 50 за счет diui трения перематывагется, при этом длина одной ветви уменьшается а другой - увеличивается. Шток натяжителя, на котором запасована укорачивающаяся -ветвь каната,принудительно втягивается в цилиндр , а шток другого натяжителя, на котором запасована удлиняющая ветвь каната, под действием сжатого воздуха в полйсти высокого давления начинает шдпвигаться. При изменении направления вращения жестко закрепленного на валу гидропривода барабана , происходит обратное движение штоков. Так как вращение барабана осуществляется по синусоидальному закону, задаваемому гидроприводом, то и движение штоков натяжителей происходит по этому же закону.Таким образом, барабан 2, попеременно воздействуя на штоки натяжнтелей, приводит их в возвратно-посту- . пательное движение, параметры которого, скорость и длина хода соответствуют заданньм параметрам волиеюш
моря. Синусоидальный характер подачи жидкости осуществляется системой регулируемых механизмов, воздейству- , ющих на заданном режиме на насос 7.
Насос 7 (фиг. 2-4) приводится в действие от электродвигателя 10, который через редуктор 11 вращает кривошип 13, Вращение кривошипа 13 посредством пальца 25 и подвижного камня 14 преобразуется в возвратнопоступательное движение ползуна 15, при этом его палец 17 поворачивает в ту или другую сторону рукоятку 19, ,а та, в свою очередь, поворачивает вал 20 люльки насоса, изменяя его npo .изводитедьность. При отклонении от .среднего положения рукоятка 19 взаимодействует с конечными выключателями 22 и 23, управляйщими золотником в гидросистеме насоса 7, который изменяет направление потока рабочей жидкости, подаваемой к гидромотору 6. Кривошип 13 при вращении периодически воздействует на датчик 24, подающий сигнал в систему синхронизации в момент достиження насосом максимальной производительности.
При необходимости управление насосом может осуществляться вручную. Для этого палец 17 с помощью стержня 21 устанавливается и выходит из паза рукоятки 19, разобщая, таким образом, ее связь с ползуном 15. В этом случае управление насосом производится по- ,, средством рукоятки 19.
Система синхронизации (фиг. 5) работает следующим образом. При прохождении штоками натяжителей среднего положения датчик 28 выдает электрический сигнал группе реле 30. На эту же группу реле поступает электрический сигнал от датчика 24 в момент достижения насосом 7 максимальной производительности при данном режиме работы. При синхронности работы гидропривода и движения штоков натяжителей характерные токи подачи жидкости и движение штоков совмещаются и сигналы от датчиков 28 и 24 на группу реле 30 поступают одновременно, при этом корректировка работы гидропривода не производится . В случае появления рассогласования. Например если раньше поступил сигнал от датчика 28,труппа реле 30 шунтирует резистор в цепи управления электродвигателем 10, увеличивая, таким образом, скорость его вращения. В случае, если раньше поступил сигнал от конечного выключателя, группа реле 30 включает дополнительный резистор в цепи управления электродвигателем-10, что приводит к уменьшению скорости его вращения.
Технико-экономический эффект заключается в максимальном приближении условий испытаний натяжителей плавучик буровых установок к реальным условиям их эксплуатации, что повьш1ает надежность работы системы натяжения морской водоотделяющей колонны при бзфении с плавучих буровых установок.
20
Ю
0иг.2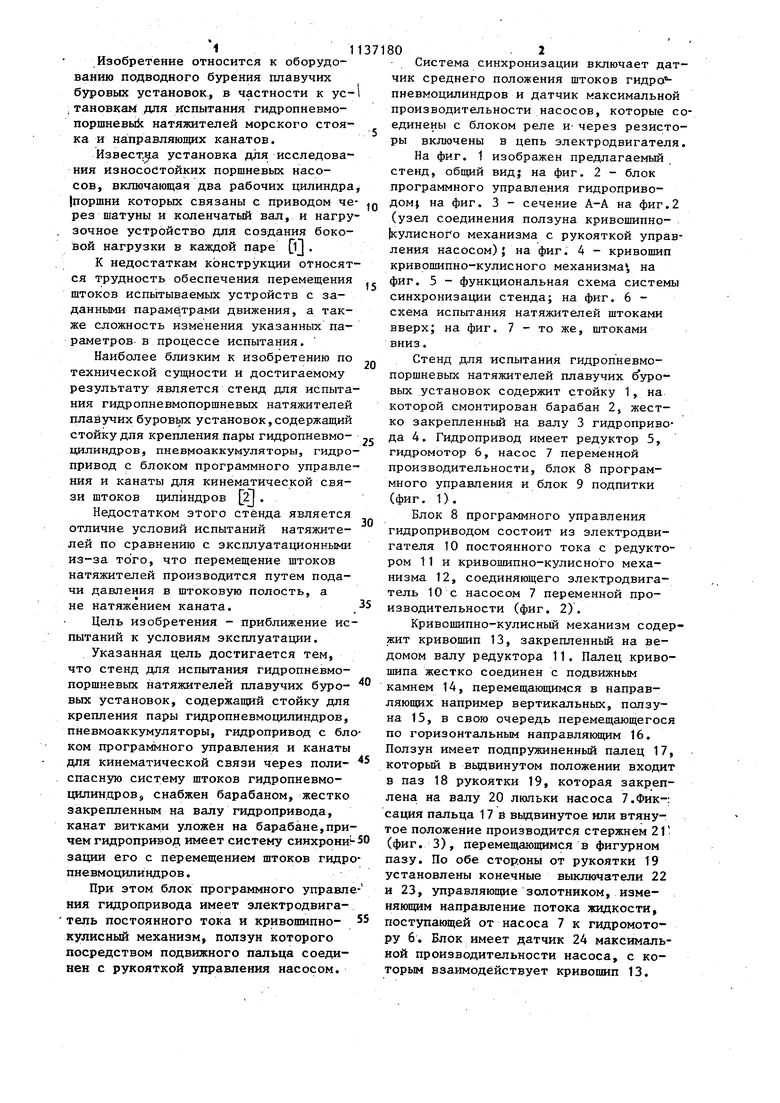
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания подводного устьевого оборудования | 1978 |
|
SU744107A1 |
| Натяжитель морского стояка | 1988 |
|
SU1544945A1 |
| Устройство для натяжения морского стояка плавучей буровой установки | 1987 |
|
SU1452910A1 |
| Натяжитель морского стояка | 1989 |
|
SU1645432A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| Сдвоенный натяжитель морского стояка плавучих буровых установок | 1990 |
|
SU1724895A1 |
| Тренажер оператора энергетического объекта | 1983 |
|
SU1136202A2 |
| Подъемное устройство | 1978 |
|
SU832027A1 |
| Тренажер оператора энергетического объекта | 1976 |
|
SU604022A1 |
| Устройство для автоматической однопроходной сварки плоских полотнищ | 1979 |
|
SU863225A1 |
1. СТЕНД ДЛЯ ИСПЫТАНИЯ ГИДРОПНЕВМОПОРШНЕВЫХ НАТЯЖТЕЛЕЙ ПЛАВУЧИХ БУРОВЫХ УСТАНОВОК, содержащий стойку для крепления пары гидропневмоцилиндров, пневмоаккумуляторы, гидропривод с блоком программного управления и канаты для кинематической связи штоков гидропневмоцилиндров, , отличающийся тем, что, с целью приближения испытаний к условиям эксплуатации, он снабжен барабаном, жестко закрепленным на валу гидропривода, a канат витками уложен на барабане, причем гидропривод имеет систему синхронизации с перемещением штоков гидропневмоцилиндров. 2.Стенд по п. 1, отличающийся тем, что блок программного управления гидропривода имеет электродвигатель постоянного тока и кривошипно-кулисный механизм, ползун которого посредством подвижного пальца соединен с рукояткой управлений насосом. i 3.Стенд по пп. 1 и 2, о т л и ч ; ю щи и с я тем, что система синхронизации включает датчик среднего положения штоков гидропневмоцилиндров и датчик максимальной щхжзводительности, которые соединены с блоком реле и через резисторы включены в цепь электродвигателя. .
Фи&З
27
i3
26 45 9 52 50
Фиг. 7 8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Установка для исследования износостойкости рабочих пар поршневого насоса | 1974 |
|
SU488934A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Проспект Rucher Company, Jtewaut Jtevenson Oiltools Jnc, Regan off shore Jnternational Jnc, 1976 (прототип). | |||
