1
Изобретение относится к машиностроени в частности к манипуляторам копирующего типа, предназначенным для вьшолнения, например, погрузочно-разгрузочных, монтажных, работ.
Известны манипуляторы копирующего типа, содержащее геометрически подобные хшогозвенные исполнительный и задающий органы, приводы и следящую систему с переключателями, ceльcин-дaтчикa ш и
сельсин-приемниками, кинематически связaш ы ш с приводами.
С целью упрощения конструкции и повышения надежности манипулятора вне зависимости от характера нагрузок при дистанциокном управлении привод каждого звена задажянего органа вьшолнен в виде винтовой самотормозящейся передачи, винт которой жестко соединен с сельсин-приемником, гайка - с этим звеном через подпружинен- вые переключатели, а сельсин-датчик связан с приводом звена исполнительного органа, например, зубчато-реечной передачей.
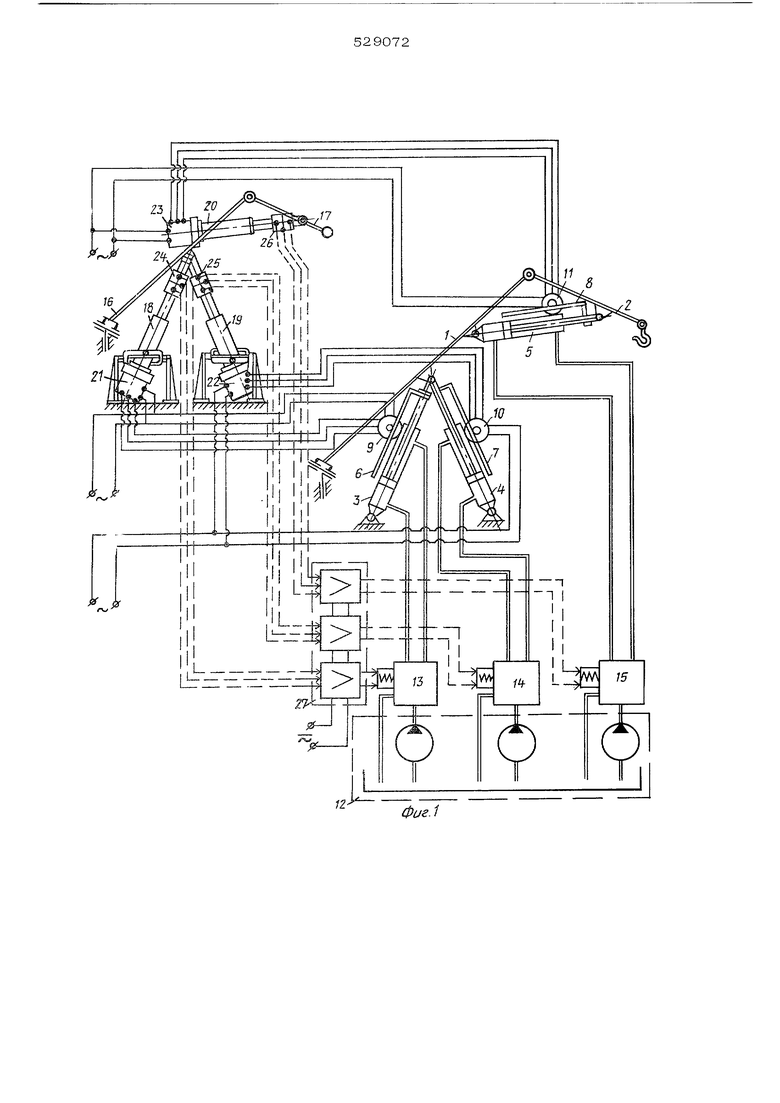
На фиг. 1 дана принципиальная схема манипулятора, пунктирными линиями обозна
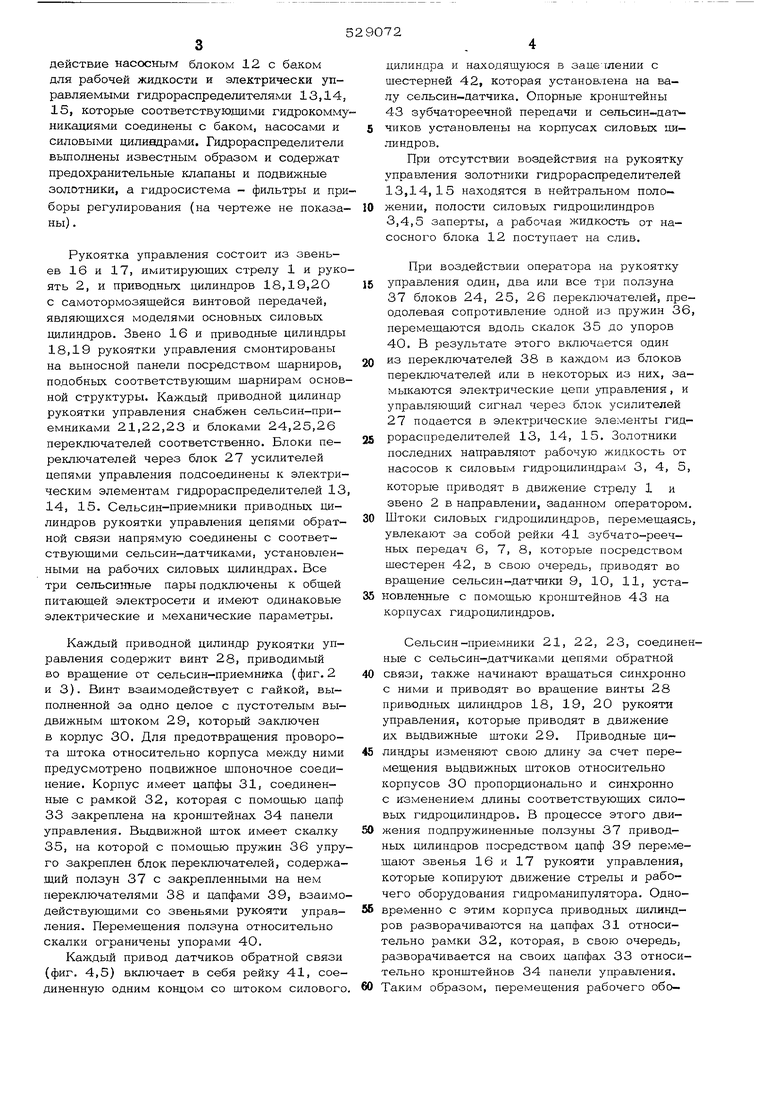
чены электрические цепи, сплошными - цепи обратной связи, двойными - гидроком- муникации; на фиг. 2 - привод звена задающего органа в разрезе; на фиг, 3 -- разрез А-А на фиг. 2; на фиг. 4 - cxeisia установки сельсин-датчика, на фиг. 5 - разрез Б-Б на фиг, 4.
Манипулятор содержит многозвенный исполнительный механизм; стрелу 1 с рукоятью 2, - и геометрически ей подобный задающий механизм - рукоятку управления. Стрела смонтирована на основании посредством шарнирного узла с двумя степеня1 ш свободы. Стрела переме.щается в горизонтальной и вертикальной плоскостях двумя гидравлическими силовыл-ш цилиндрами 3 и 4, корпуса которых аналогичным образом закреплены на основании, а штоки обоих цилиндров соединены между собой и со стрелой. На стреле имеется третий силовой цилиндр 5, предназначенный для поворота следую.щего звена. На каждом цилиндре установлены зубчато-реечные передачи 6,7,8 и сельсин-датчиш 9,10,11 соответственно. Силовые дилиЕЩры приводятся в действие насосным блоком 12 с баком для рабочей жидкости и электрически управляемыми гидрораспределителями 13,14 15, которые соответствующими гидрокомм никадиями соединены с баком, насосами и силовыми циливдрами. Гидрораспределители вьшолнены известным образом и содержат предохранительные клапаны и подвижные золотники, а гидросистема - фильтры и при боры регулирования (на чертеже не показа ны) . Рукоятка управления состоит из звеньев 16 и 17, имитирующих стрелу 1 и руко ять 2, и приводных цилиндров 18,19,20 с самотормозящейся винтовой передачей, являющихся моделями основных силовых цилиндров. Звено 16 и приводные цилиндры 18,19 рукоятки управления смонтированы на выносной панели посредством шарниров, подобных соответствующим щарнирам основ ной структуры. Каждый приводной цилиндр рукоятки управления снабжен сельсин-приемниками 21,22,23 и блоками 24,25,26 переключателей соответственно. Блоки переключателей через блок 27 усилителей цепями управления подсоединены к электрическим элементам гидрораспределителей 13 14, 15. Сельсин-приемники приводных цилиндров рукоятки управления цепями обратной связи напрямую соединены с соответствующими сельсин-датчиками, установленными на рабочих силовых цилиндрах. Все три сельсинные пары подключены к обшей питающей электросети и имеют одинаковые электрические и механические параметры. Каждый приводной цилиндр рукоятки управления содержит винт 28, приводимый во вращение от сельсин-приемника (фиг. 2 и 3). Винт взаимодействует с гайкой, выполненной за одно целое с пустотелым выдвижным штоком 29, который заключен в корпус 30. Для предотвращения проворота щтока относительно корпуса между ними предусмотрено подвижное шпоночное соединение. Корпус имеет цапфы 31, соединенные с рамкой 32, которая с помощью цапф 33 закреплена на кронштейнах 34 панели управления. Вьщвижной шток имеет скалку 35, на которой с помощью пружин 36 упру го закреплен блок переключателей, содержащий ползун 37 с закрепленными на нем переключателями 38 и цапфами 39, взаимо действующими со звеньями рукояти управления. Перемещения ползуна относительно скалки ограничены упорами 40. Каждый привод датчиков обратной связи (фиг. 4,5) включает в себя рейку 41, соединенную одним концом со штоком силового цилиндра и находящуюся в заде-тлении с шестерней 42, которая установ.аена на валу сельсин-датчика. Опорные кронштейны 43 зубчатореечной передачи и сельсин-датчиков установлены на корпусах силовых цилиндров. При отсутствии воздействия на рукоятку управления золотники гидрораспределителей 13,14,15 находятся в нейтральном положении, полости силовых гидроцилиндров 3,4,5 заперты, а рабочая жидкость от насосного блока 12 поступает на слив. При воздействии оператора на рукоятку управления один, два или все три ползуна 37 блоков 24, 25, 26 переключателей, преодолевая сопротивление одной из пружин 36, перемещаются вдоль скалок 35 до упоров 40. В результате этого включается один из переключателей 38 в каждом из блоков переключателей или в некоторых из них, замыкаются электрические цепи управления, и управляющий сигнал через блок усилителей 27 подается в электрические элементы гидрораспределителей 13, 14, 15. Золотники последних направляют рабочую жидкость от насосов к силовым гидроцилиндрам 3, 4, 5, которые приводят в движение стрелу 1 и звено 2 в направлении, заданном оператором. Штоки силовых гидроцияин.дров, перемещаясь, увлекают за собой рейки 41 зубчато-реечных передач 6, 7, 8, которые посредством шестерен 42, в свою очередь, приводят во вращение сельсин-датч1{ки 9, 10, 11, установленные с помощью кронштейнов 43 на корпусах гидроцилиндров. Сельсин-приеЕу1ники 21, 22, 23, соединенные с сельсин-датчиками цепями обратной связи, также начинают вращаться синхронно с ними и приводят во вращение винты 28 приводных цилиндров 18, 19, 20 рукояти управления, которые приводят в движение их вьщвижные штоки 29. Приводные цилиндры изменяют свою длину за счет перемещения выдвижных штоков относительно корпусов 30 пропорционально и синхронно с изменением длины соответствующих силовых гидроцилиндров. В процессе этого дви- жения подпружиненные ползуны 37 приводных цилиндров посредством цапф 39 перемещают звенья 16 и 17 рукояти управления, которые копируют движение стрелы и рабочего оборудования гидроманипулятора. Одновременно с этим корпуса приводных цилиндров разворачиваются на цапфах 31 относительно рамки 32, которая, в свою очередь, разворачивается на своих цапфах 33 относительно кронштейнов 34 панели управления. Таким образом, перемещения рабочего обо-
рудования и рукояти управления оказьшаются полностью подобными независимо от величины усилия, приложенного к рукояти управления и нагрузки на рабочее оборудование гидроманипупятора.
Следящий привод манипулятора имеет свойство обратимости по перемещению, что повышает эффективность проведения погрузочно-разгрузочных работ, так как облегчает управление и повышает точность манипулирования. Применение сельсинной индикаторной передачи перемещения вместе с самотормозящейся винтовой передачей упрощает обратимую следящую систему за счет совмещения в одном канале передачи движения от рабочего оборудования к рукояти управления и сигналов обратной связи следящей системы.
Формула изобретения
Манипулятор, например, для погрузочноразгрузочных работ, содержащий геометри-
чески подобные многозвенные исполнительный и задающий органы, приводы и следящую систему с переключателями, сельсиндатчиками и сельсин-приемниками, кинематически связанными с приводами, о т личающийся тем, что, с целью упрощения конструкции и повышения надежности, привод каждого звена задающего органа выполнен в виде винтовой самотормозящейся передачи, винт которой жестко
соединен с сельсин-приемником, гайка - с этим звеном через подпружиненные переключатели, а сельсин-датчик связан с приводом звена исполнительного органа, например, зубчато-реечной передачей.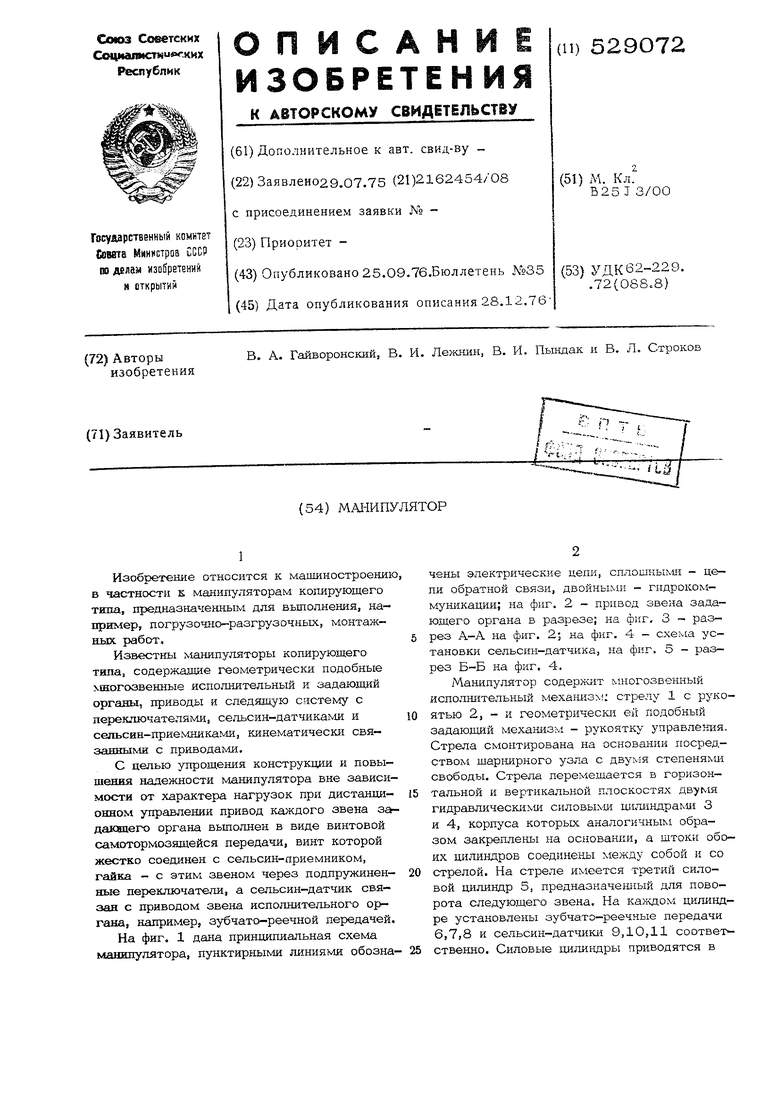

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1986 |
|
SU1380932A1 |
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| Способ управления рабочим оборудованием экскаватора | 1978 |
|
SU885458A1 |
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| Гидропривод управления экскаваторным оборудованием | 1978 |
|
SU768896A1 |
| Гидропривод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134679A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1971 |
|
SU307897A1 |
| Гидравлический кран-манипулятор | 1975 |
|
SU865771A1 |
| Гидравлический привод экскаватора | 1972 |
|
SU608892A1 |