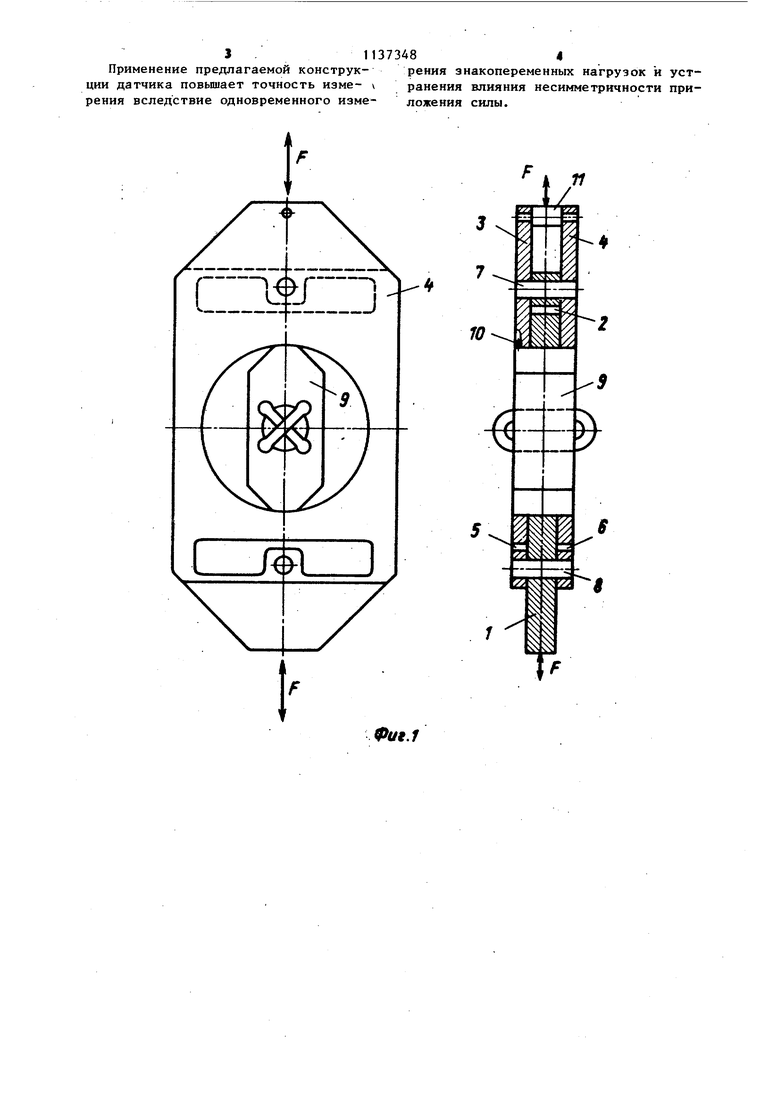
- Изобретение относится к измерител ной технике и может быть использовано в системах автоматического изме рения силы и массы в транспортной авиации. Известен магнгтоупругий датчик усилий, содержащий тягу и ОПОРУ с ма нитопроводом, в которой выполнены обмотки измерения и возбуждения 1 Т. Данный датчик не может одновременно измерять тяговые и сжимающие усилия и имеет низкую точность измерения из-за неравномерной деформации чувствительного элемента. Кроме того такие датчики трудоемки в изготовлеНаиболее близок к предлагаемому по технической сущности реверсивный датчик, в котором растягивающие усилия преобразуются в сжимающие усилия Вьтолненньй в виде двух захватов, связанных посредством соответствующих тяг с плоскими платформами j, .между которыми установлен магнитоанизотропный преобразователь, причем верхний захват реверсивного датчика посредством трех тяг через сквозные отверстия в верхней платформе жестко связан с нижней платформой, а нижний захват посредством трех других тяг через сквозные отверстия в нижней платформе жестко связан с верхней платформой 2. Недостатком известного датчика является низкая точность измерения знакопеременных нагрузок. Цель изобретения --повьшение точности измерения знакопеременных сил. Поставленная цель достигается тем, что в датчике, содержащем магни тоанизотропный преобразователь и реверсор с тягами, тяги реверса выполнены в виде параллельно расположе ных одной-центральной и двух боковых пластин, боковые пластины жестко сое динены мезиду собой и соприкасаются с центральной пластиной боковыми rpia нями, в центральной части всех трех пластин выполнены соосные отверстия равного диаметра, в которых с предварительным натягом установлен маг нитоанизотропный преобразователь, в периферийной части каждой пластины выполнены П-образные пазы, поперечные стороны которых обращены к магнитоанизотропному преобразователю, причем П-образный паз центральной пластины расположен по одну сторону от магнитоанизотропного преобразователя, а П-образные пазы бо- ковых пластин расположены по другую сторону магнитоанизотропного преобразователя, при зтом все три пластины соединены между собой жесткими цилиндрическими пальцами, расположенными на оси симметрии П-образных пазов между их внутренними боковыми сторонами. На фиг.1 и 2 изображен реверсивный датчик для измерения тяговых и сжимающих усилителей. Датчик содержит центральную пластину 1 с П-образным пазом 2, боковые пластины 3 и 4 с П-образными пазами 5 и 6, штифты 7 и 8, скрепляющие между собой пластины, в сквозной расточке которых установлен магнитоанизотропньй преобразователь 9, закрепляемый фиксатором 10, шпильку 11 для жесткого соединения боковых пластин в точке приложения в-нешней нагрузки. Предлагаемый датчик работает следующим образом. При приложении тягового усилия к центральной пластине 1 и боковым пластинам 3 и 4 через шпильку 11 оно будет перераспределяться посредством развязывающих П-образных пазов 2, 5 и 6 и штифтов 7 и 8. Основная часть тягового усилия при зтом прикладывается к преобразователю 9 в местах сопряжения его верхней силовоспринимающей поверхности с центральной пластиной 1 и его нижней силовоспринимающей поверхности с боковыми пластинами 3 и 4. При этом преобразователь 9 сжимается. Если к центральной пластине 1 и к боковым пластинам 3 и 4 через шпильку 11 будет приложено сжимающее усилие, то преобразователь 9 опять будет сжиматься. Фиксатор 10 удерживает преобразователь 9 в заданном положении при приложений внешних нагрузок, что позволяет сохранять центрирование преобразователя 9. В случае возникновения перегрузки при нагружении датчика тяговыми УСИЛИЯМИ, поперечная сторона П-образного паза сомкнется с соответствуюощми поверхностями центральной пластины 1 и боковых пластин 3 и 4 и тем самым предохраняет преобразователь 9 от разрушения.
J ,11373484
Применение предлагаемой конструк- рения знакопеременных нагрузок и устции датчика повьпиает точность иэме- ранения влияния несимметричности прирения вследствие одновременного изме- ложения силы.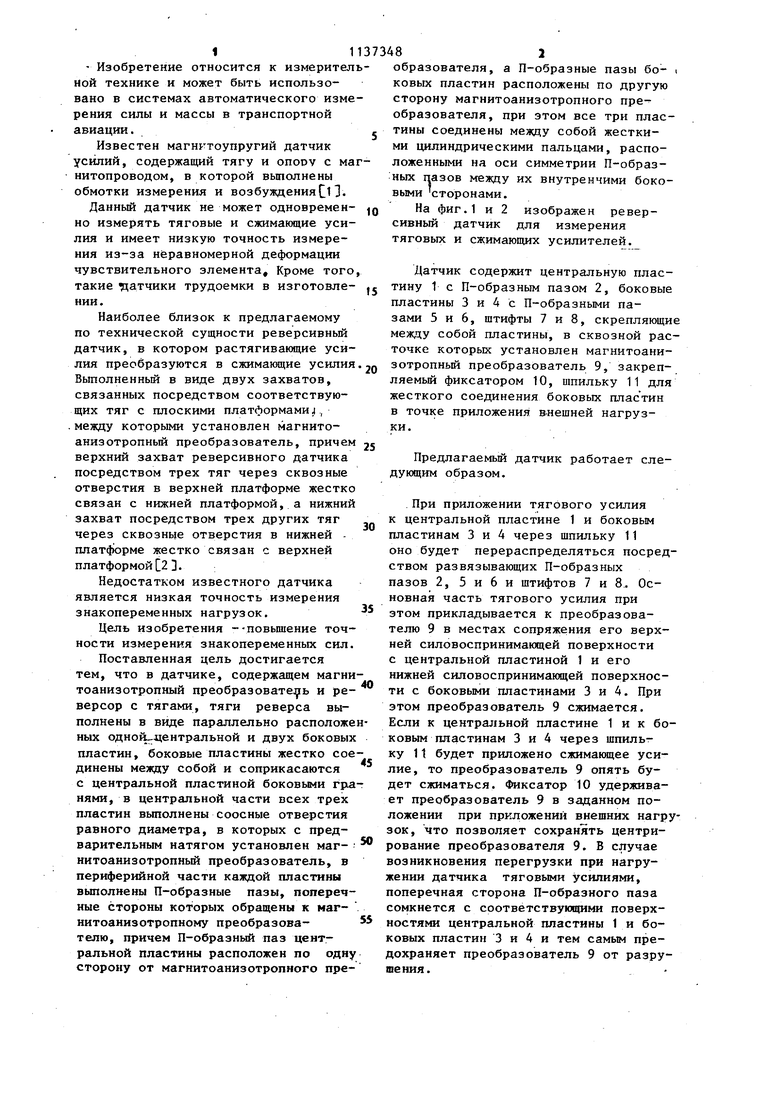
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для аэродинамических испытаний силовых установок летательных аппаратов | 2023 |
|
RU2825165C1 |
| Силоизмерительное устройство | 1990 |
|
SU1742645A1 |
| Устройство для измерения горизонтальной силы тягового сопротивления навесных машин | 1986 |
|
SU1425484A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ | 1997 |
|
RU2114406C1 |
| Устройство для измерения силы | 1990 |
|
SU1739218A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТЕПЛОВОЗОМ | 1970 |
|
SU269654A1 |
| ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПРОДОЛЬНЫХ УСИЛИЙ | 2009 |
|
RU2404415C1 |
| ДАТЧИК СИЛЫ | 2004 |
|
RU2280847C2 |
| ДАТЧИК ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1995 |
|
RU2111464C1 |
| Тензорезисторный датчик силы | 1982 |
|
SU1027546A1 |
ДАТЧИК. СИЛЫ, содержащий магнитоанизотропный преобразователь и реверсор с тягами, отличающийся тем, что, с целью повышения точности измерения знакопеременных сил, тяги реверса вьшолнены в виде параллельно расположенных ./: ;4ii;j i .:.;;:.:.: :i IT-;ji .--. --. . ,. /ii&jt:i o.:A,.;. ной центральной и двух боковых пластин, боковые пластины жестко соединены между собой и соприкасаются с .. центральной пластиной боковьми гранями, в центральной части всех трех пластин выполнены соосные отверстия равного диаметра, в которых с предварительным натягом установлен магнитоанизотропный преобразователь, в периферийной части,каждой пластины ;выполнены П-образные пазы, поперечные стороны которых обращены к магнитоанизотропному преобразователю, причем П-образный паз центральной ,пластины расположен по одну § сторону от магнитоанизотропного преобразователя, а П-образные пазы боковых пластин расположены по другую сторону магнитоанизотропного преобразователя, при этом все три пластины соединены между собой жесткими цилиндрическими пальцами, расположенными на оси симметрии П-образных пазов между их внутренними боковыми СО сторонами. д со 4 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Магнитоупругие датчики | |||
| М., Энергия, 1970, с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Проспект фирмы Martin-Decker, США Спрототип) | |||
