4; to сл
4
00
4
Фиг.1
Изобретение относится к силоизмеритель- ной технике и может быть использовано для измерения горизонтальной силы тягового сопротивления сельскохозяйственных машин, агрегатируемых с тракторами, оборудованными механизмом задней навески.
Цель изобретения - повышение надежности за счет упрощения конструкции.
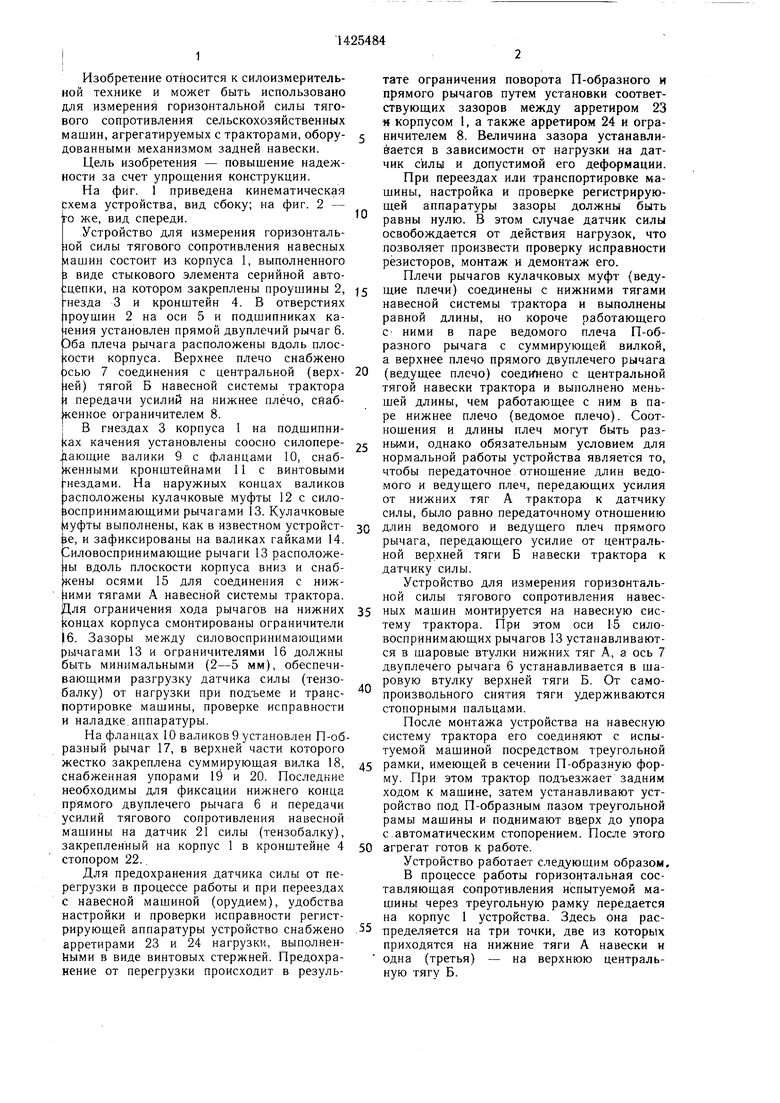
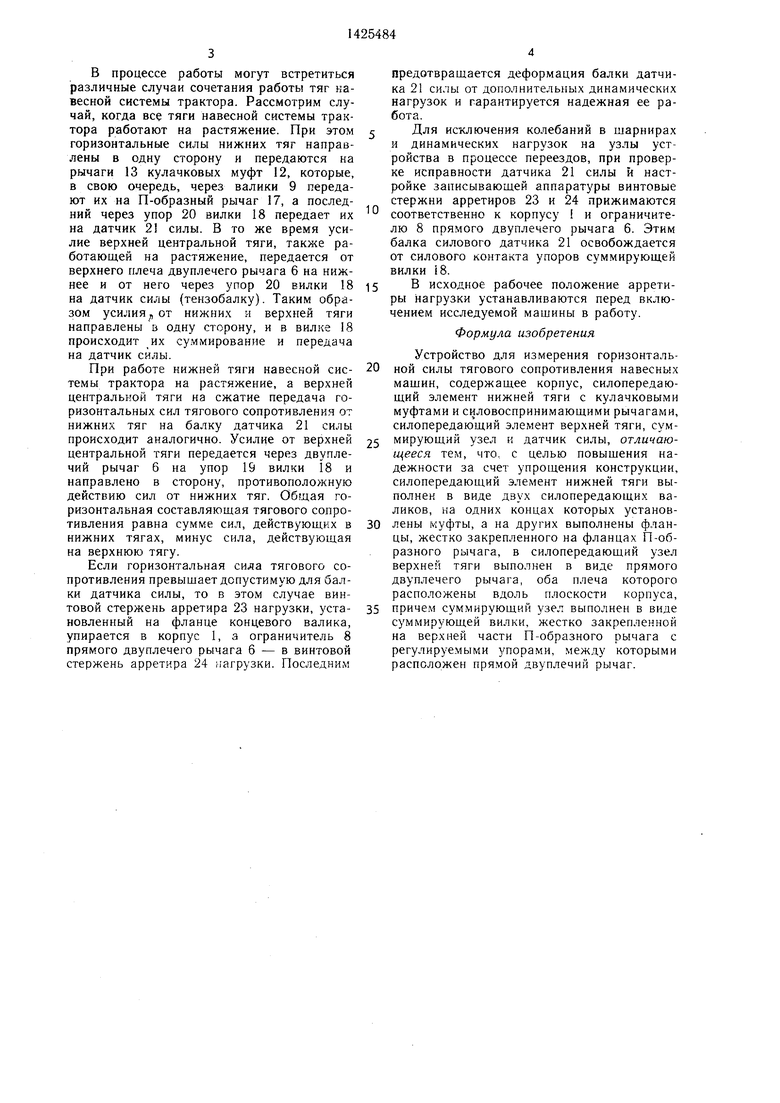
На фиг. 1 приведена кинематическая Схема устройства, вид сбоку; на фиг. 2 - го же, вид спереди.
Устройство для измерения горизонталь- 10Й силы тягового сопротивления навесных лашин состоит из корпуса 1, выполненного 3 виде стыкового элемента серийной авто- ;цепки, на котором закреплены проушины 2, незда 3 и кронштейн 4. В отверстиях троушин 2 на оси 5 и подшипниках ка- 1ения установлен прямой двуплечий рычаг 6. Эба плеча рычага расположены вдоль плоскости корпуса. Верхнее плечо снабжено )сью 7 соединения с центральной (верх- 1ей) тягой Б навесной системы трактора i передачи усилий на нижнее плечо, сйаб- енное ограничителем 8. I В гнездах 3 корпуса 1 на подшипни- качения установлены соосно силопере- Даюш,ие валики 9 с фланцами 10, снаб- кенными кронштейнами 11 с винтовыми нездами. На наружных концах валиков расположены кулачковые муфты 12 с сило- юспринимающими рычагами 13. Кулачковые луфты выполнены, как в известном устройст- je, и зафиксированы на валиках гайками 14. Силовоспринимающие рычаги 13 расположе- ibi вдоль плоскости корпуса вниз и снабжены осями 15 для соединения с ниж- ими тягами А навесной системы трактора. Для ограничения хода рычагов на нижних Цонцах корпуса смонтированы ограничители (б. Зазоры между силовоспринимаюшими рычагами 13 и ограничителями 16 должны быть минимальными (2-5 мм), обеспечивающими разгрузку датчика силы (тензо- балку) от нагрузки при подъеме и транспортировке машины, проверке исправности и наладке,аппаратуры.
На фланцах 10 валиков 9 установлен П-об- разный рычаг 17, в верхней части которого жестко закреплена суммирующая вилка 18, снабженная упорами 19 и 20. Последние необходимы для фиксации нижнего конца прямого двуплечего рычага 6 и передачи усилий тягового сопротивления навесной машины на датчик 21 силы (тензобалку), закрепленный на корпус 1 в кронштейне 4 стопором 22..
Для предохранения датчика силы от перегрузки в процессе работы и при переездах с навесной машиной (орудием), удобства настройки и проверки исправности регистрирующей аппаратуры устройство снабжено арретирами 23 и 24 нагрузки, выполнен- йыми в виде винтовых стержней. Предохранение от перегрузки происходит в резуль
тате ограничения поворота П-образного и прямого рычагов путем установки соответствующих зазоров между арретиром 23 « корпусом 1, а также арретиром 24 и ограничителем 8. Величина зазора устанавливается в зависимости от нагрузки на датчик силы и допустимой его деформации. При переездах или транспортировке машины, настройка и проверке регистрирующей аппаратуры зазоры должны- быть равны нулю. В этом случае датчик силы освобождается от действия нагрузок, что позволяет произвести проверку исправности резисторов, монтаж и демонтаж его.
Плечи рычагов кулачковых муфт {ведущие плечи) соединены с нижними тягами навесной системы трактора и выполнены равной длины, но короче работающего с- ними в паре ведомого плеча П-образного рычага с суммирующей вилкой, а верхнее плечо прямого двуплечего рычага
(ведущее плечо) соединено с центральной тягой навески трактора и выполнено меньшей длины, чем работающее с ним в паре нижнее плечо (ведомое плечо). Соотношения и длины плеч могут быть разньши, однако обязательным условием для нормальной работы устройства является то, чтобы передаточное отношение длин ведомого и ведущего плеч, передающих усилия от нижних тяг А трактора к датчику силы, было равно передаточному отнощению
длин ведомого и ведущего плеч прямого рычага, передающего усилие от центральной верхней тяги Б навески трактора к датчику силы.
Устройство для измерения горизонтальной силы тягового сопротивления навесных машин монтируется на навесную систему трактора. При этом оси 15 сило- воспринимающих рычагов 13 устанавливаются в шаровые втулки нижних тяг А, а ось 7 двуплечего рычага 6 устанавливается в шаровую втулку верхней тяги Б. От самопроизвольного снятия тяги удерживаются стопорными пальцами.
После монтажа устройства на навесную систему трактора его соединяют с испытуемой машиной посредством треугольной
рамки, имеющей в сечении П-образную форму. При этом трактор подъезжает задним ходом к машине, затем устанавливают устройство под П-образным пазом треугольной рамы машины и поднимают ваерх до упора с автоматическим стопорением. После этого
агрегат готов к работе.
Устройство работает следующим образом, В процессе работы горизонтальная составляющая сопротивления испытуемой машины через треугольную рамку передается на корпус 1 устройства. Здесь она распределяется на три точки, две из которых приходятся на нижние тяги А навески и одна (третья) - на верхнюю центральную тягу Б.
10
В процессе работы могут встретиться различные случаи сочетания работы тяг навесной системы трактора. Рассмотрим случай, когда все тяги навесной системы трактора работают на растяжение. При этом горизонтальные силы нижних тяг направлены в одну сторону и передаются на рычаги 13 кулачковых муфт 12, которые, в свою очередь, через валики 9 передают их на П-образный рычаг 17, а последний через упор 20 вилки 18 передает их на датчик 2 силы. В то же время усилие верхней центральной тяги, также работающей на растяжение, передается от верхнего плеча двуплечего рычага 6 на нижнее и от него через упор 20 вилки 18 15 на датчик силы (тензобалку). Таким образом усилия, от нижних и верхней тяги направлены в одну сторону, и в вилке 18 происходит их суммирование и передача на датчик силы.
При работе нижней тяги навесной сие- 20 темы трактора на растяжение, а верхней центральной тяги на сжатие передача горизонтальных сил тягового сопротивления от нижних тяг на балку датчика 21 силы происходит аналогично. Усилие от верхней 25 центральной тяги передается через двуплечий рычаг 6 на упор 19 вилки 18 и направлено в сторону, противоположную действию сил от нижних тяг. Общая горизонтальная составляющая тягового сопроПредотвращается деформация балки датчика 21 силы от дополнительных динамических нагрузок и гарантируется надежная ее работа.
Для исключения колебаний в шарнирах и динамических нагрузок на узлы устройства в процессе переездов, при проверке исправности датчика 21 силы и настройке записывающей аппаратуры винтовые стержни арретиров 23 и 24 прижимаются соответственно к корпусу и ограничителю 8 прямого двуплечего рычага 6. Этим балка силового датчика 21 освобождается от силового контакта упоров суммирующей вилки 18.
В исходное рабочее положение арретиры нагрузки устанавливаются перед включением исследуемой машины в работу.
Формула изобретения
Устройство для измерения горизонтальной силы тягового сопротивления навесных мащин, содержащее корпус, силопередаю- щий элемент нижней тяги с кулачковыми муфтами и силовоспринимающими рычагами, силопередаю щий элемент верхней тяги, суммирующий узел н датчик силы, отличающееся тем, что. с целью повыщения надежности за счет упрощения конструкции, силопередающий элемент нижней тяги выполнен в виде двух силопередающих валиков, ка одних концах которых установтивления равна сумме сил, действующих в 30 лены муфты, а на других выполнены фланнижних тягах, минус сила, действующая на верхнюю тягу.
Если горизонтальная сила тягового сопротивления превышает допустимую для балки датчика силы, то в этом случае винтовой стержень арретира 23 нагрузки, уста- 35 новленный на фланце концевого валика, упирается в корпус 1, а ограничитель 8 прямого двуплечего рычага б - в винтовой стержень арретира 24 нагрузки. Последним
цы, жестко закрепленного на фланцах П-об- разного рычага, в силопередающий узел верхней тяги выполнен в виде прямого двуплечего рычага, оба плеча которого расположены вдоль плоскости корпуса, причем суммирующий узел выполнен в виде суммирующей вилки, жестко закрепленной на верхней части П-образного рычага с регулируемыми упорами, между которыми расположен прямой двуплечий рычаг.
0
5
0 5
Предотвращается деформация балки датчика 21 силы от дополнительных динамических нагрузок и гарантируется надежная ее работа.
Для исключения колебаний в шарнирах и динамических нагрузок на узлы устройства в процессе переездов, при проверке исправности датчика 21 силы и настройке записывающей аппаратуры винтовые стержни арретиров 23 и 24 прижимаются соответственно к корпусу и ограничителю 8 прямого двуплечего рычага 6. Этим балка силового датчика 21 освобождается от силового контакта упоров суммирующей вилки 18.
В исходное рабочее положение арретиры нагрузки устанавливаются перед включением исследуемой машины в работу.
Формула изобретения
Устройство для измерения горизонтальной силы тягового сопротивления навесных мащин, содержащее корпус, силопередаю- щий элемент нижней тяги с кулачковыми муфтами и силовоспринимающими рычагами, силопередаю щий элемент верхней тяги, суммирующий узел н датчик силы, отличающееся тем, что. с целью повыщения надежности за счет упрощения конструкции, силопередающий элемент нижней тяги выполнен в виде двух силопередающих валиков, ка одних концах которых установ лены муфты, а на других выполнены фланцы, жестко закрепленного на фланцах П-об- разного рычага, в силопередающий узел верхней тяги выполнен в виде прямого двуплечего рычага, оба плеча которого расположены вдоль плоскости корпуса, причем суммирующий узел выполнен в виде суммирующей вилки, жестко закрепленной на верхней части П-образного рычага с регулируемыми упорами, между которыми расположен прямой двуплечий рычаг.
Л х2/
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения горизонтальной силы тягового сопротивления навесных машин | 1983 |
|
SU1236336A1 |
| Устройство для динамометрирования навесных и полунавесных сельскохозяйственных машин | 1988 |
|
SU1522054A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАВЕСНОЙ СИСТЕМОЙ ТРАКТОРА | 1997 |
|
RU2126616C1 |
| Устройство для определения горизонтального усилия от навесного почвообрабатывающего орудия | 2021 |
|
RU2770796C1 |
| Стабилизатор продольной устойчивости трактора | 1983 |
|
SU1178647A1 |
| Почвообрабатывающий агрегат | 1981 |
|
SU969185A1 |
| Способ и устройство для определения горизонтального усилия от навесного почвообрабатывающего орудия | 2020 |
|
RU2749578C1 |
| ТЯГОВО-ДОГРУЗОЧНОЕ УСТРОЙСТВО К ПРИЦЕПУ | 2014 |
|
RU2559660C1 |
| Устройство для динамометрирования навесных орудий | 1987 |
|
SU1509643A1 |
| Устройство для определения усилия | 2022 |
|
RU2789013C1 |
Изобретение относится к силоизмери- тельной технике и позволяет повысить надежность устр-ва за счет упрощения его конструкции. Силопередающий узел верхней тяги выполнен в виде двуплечего рычага б, плечи которого расположены вдоль плоскости корпуса 1. Нижний конец рычага 6 фиксируется между упорами 19 и 20 сум- мируюшей вилки 18, передающими усилия тягового сопротивления навесной машины на датчик 21 силы. Вилка 18 жестко закреплена на П-образном рычаге 17, установленном на фланцах 10 валиков 9 силопе- редающего элемента нижней тяги. На наружных концах валиков 9 установлены муфты 12 с силовоспринимающими рычагами 13. Ограничение поворота рычагов 6 и 17 путем обеспечения соответствующих зазоров между арретиром 23 и корпусом 1, а также арретиром 24 и ограничителем 8 предохраняет датчик 21 силы от перегрузки. 2 ил. 5 сл
| Способ соединения титана с металлами | 1985 |
|
SU1296336A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 1300311, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
