Изобретение относится сельскому хозяйству, в частности к устройствам для кормления животных.
Известно устройство для кормления животных, содержащее поилку с рычажной системой, снабженной электромагнитной катушкой и якорем и соединенной с подвижной платформой, блок управления электромагнитной катушкой, имеюш,ий датчик положения 1.
Недостатком известного устройства являются высокие энергозатраты на управление положения поилки.
Цель изобретения - снижение энергозатрат на управление положением поилки.
Поставленная цель достигается тем, что устройство для кормления животных, содержащее поилку с рычажной системой, снабженной электромагнитной катушкой и якорем и соединенной с подвижной платформой, блок управления электромагнитной катушкой, имеющей датчик положения, снабжено первым валом, внутри которого имеется второй вал, рычагом и первым сектором, выполненным в виде диска, закрепленного на первом валу, вторым сектором, выполненным в виде диска, закрепленного на втором валу, первым и вторым подпружиненными фиксаторами первого и второго валов соответственно, причем первый фиксатор имеет первую направляющую, в которой с возможностью перемещения расположен первый подпружиненный упор, и первую защелку, взаимодействующую через первый сектор с датчиком положения, а второй фиксатор имеет вторую направляющую защелку жестко соединенную с подпружиненным рычагом и подпружиненную защелку, взаимодействующую с вторым сектором, при этом якорь связан с подпружиненным рычагом, а на первом секторе установлен третий упор с возможностью взаимодействия с вторым сектором.
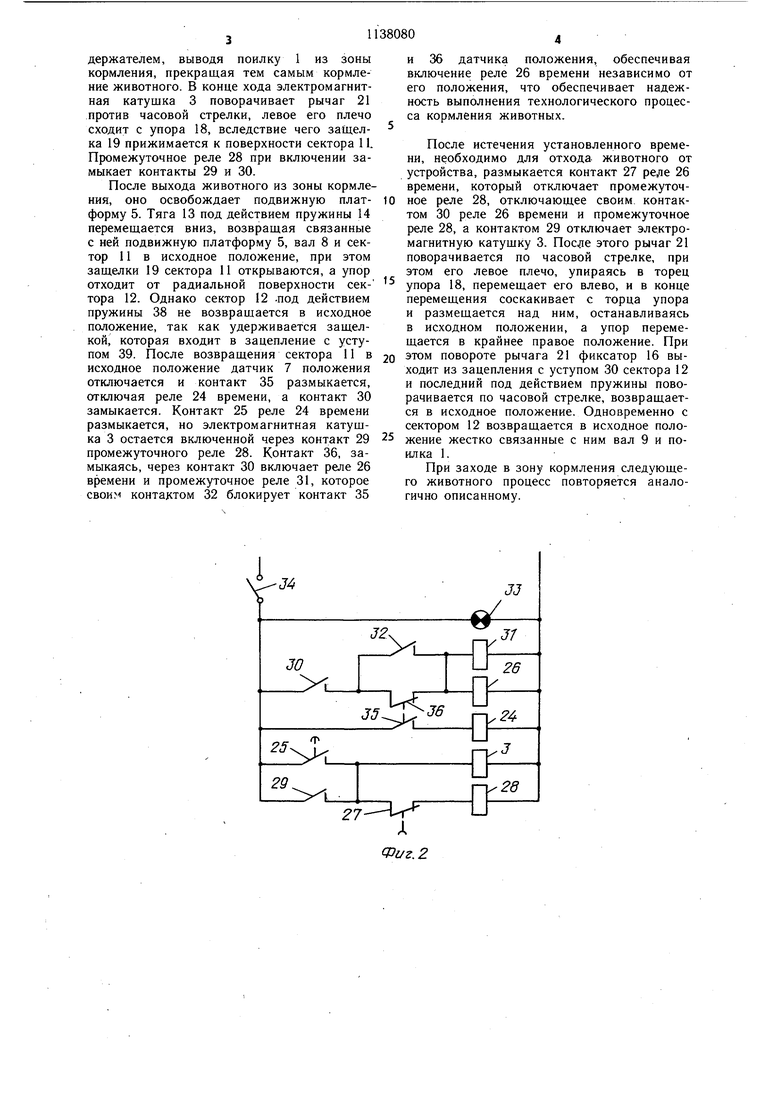
На фиг. 1 представлено устройство для кормления животных; на фиг. 2 - принципиальная схема устройства для кормления животных; на фиг. 3 - валок устройства.
Устройство для кормления животных содержит поилку 1 с рычажной системой 2, снабженной электромагнитной катушкой 3 и якорем 4 и соединенной с подвижной платформой 5, блок 6 управления электромагнитной катушкой 3, имеющей датчик 7 положения, первый вал 8, внутри которого имеется второй вал 9, рычаг 10 и первый сектор 11, выполненный в виде диска, закрепленного на первом валу 8, второй сектор 12, выполненный в виде диска, закрепленного на втором валу 9, тягу 13 и пружину 14, первый 15 и второй 16 подпружиненные фиксаторы первого 8 и второго 9 валов соответственно, причем первый фиксатор 15 имеет первую направляющую 17, в которой с возможностью перемещения расположен первый подпружиненный упор 18, и первую защелку 19, взаимодействующую через первый сектор 11 с датчиком 7 положения, а второй фиксатор 16 имеет вторую направляющую 20, жестко соединенную с подпружиненным рычагом 21 и подпружиненную защелку 22, взаимодействующую с вторым сектором 13, при этом якорь 4 связан с подпружиненным рычагом 21, первом секторе 11 установлен
0 третий упор 23 с возможностью взаимодействия с вторым сектором 13.
Блок 6 управления содержит реле 24 времени с замыкающим контактом 25, реле 26 времени с размыкающим контактом 27,
с промежуточное реле 28 с замыкающими контактами 29 и 30, промежуточное реле 31 с замыкающим контактом 32, индикатор 33 и выключатель 34. Датчик имеет замыкающий 35 и размыкающий 36 контакты. Первый сектор 11 имеет уступ 37, а сектор 12 под0 пружинен пружиной 38 и имеет уступ 39.
Устройство работает следующим образом.
После подачи питания выключателем 34 загорается индикатор 33, сигнализирующий
5 о готовности устройства к работе.
В исходном положении поилка 1 находится в положении выпойки. При заходе животного в зону кормления оно наступает на подвижную платформу 5, которая под действием веса животного поворачивается.
0 При этом тяга 13 сжимает пружину 14, поворачивает первый вал 8 с сектором 11 против часовой стрелки на некоторый угол до уступа 37 в защелку 19. При повороте сектора 11 последний воздействует на датчик 7 положения, который замыкает свой кон5 а, 35, включая тем самым.реле 24 времени, которое отсчитывает время кормления животного из поилки 1.
После истечения заданного времени кормления замыкается контакт 25 реле 24
0 времени, который включает электромагнитную катушку 3 и промежуточное реле 28. Электромагнитная катущка 3 поворачивает подпружиненньгй рычаг 21 против часовой стрелки, при этом защелка прижимается к поверхности сектора 12, частично перемещаясь вправо по направляющей 20, сжимая пружину, а конец рычага 21, воздействуя на упор 18, поворачивает защелку 19 по часовой стрелке, выводит ее из зацепления с уступом 37 сектора 11, после чего
Q под. действием веса животного, воздействующего на подвижную платформу 5, сектор 11 дополнительно поворачивается против часовой стрелки на некоторый угол. При этом упор 23 сектора 11 воздействует на поверхность сектора 12 и, растягивая пружину,
5 поворачивает его против часовой стрелки. В конце поворота сектора 12 защелка размещается слева от уступа 39. Сектор 12 поворачивает вал 8 с закрепленным на нем держателем, выводя поилку 1 из зоны кормления, прекращая тем самым кормление животного. В конце хода электромагнитная катушка 3 поворачивает рычаг 21 против часовой стрелки, левое его плечо сходит с упора 18, вследствие чего заЩелка 19 прижимается к поверхности сектора 11. Промежуточное реле 28 при включении замыкает контакты 29 и 30. После выхода животного из зоны кормления, оно освобождает подвижную платформу 5. Тяга 13 под действием пружины 14 перемещается вниз, возвращая связанные с ней подвижную платформу 5, вал 8 и сектор 11 в исходное положение, при этом защелки 19 сектора 11 открываются, а упор отходит от радиальной поверхности сектора 12. Однако сектор 12 .под действием пружины 38 не возвращается в исходное положение, так как удерживается защелкой, которая входит в зацепление с уступом 39. После возвращения сектора 11 в исходное положение датчик 7 положения отключается и контакт 35 размыкается, отключая реле 24 времени, а контакт 30 замыкается. Контакт 25 реле 24 времени размыкается, но электромагнитная катушка 3 остается включенной через контакт 29 промежуточного реле 28. Контакт 36, замыкаясь, через контакт 30 включает реле 26 времени и промежуточное реле 31, которое своим контактом 32 блокирует контакт 35 и 36 датчика положения, обеспечивая включение реле 26 времени независимо от его положения, что обеспечивает надежность выполнения технологического процесса кормления животных. После истечения установленного времени, необходимо для отхода животного от устройства, размыкается контакт 27 26 времени, который отключает промежуточное реле 28, отключающее своим, контактом 30 реле 26 времени и промежуточное реле 28, а контактом 29 отключает электромагнитную катушку 3. После этого рычаг 21 поворачивается по часовой стрелке, при , .... .- этом его левое плечо, упираясь в торец упора 18, перемещает его влево, и в конце перемещения соскакивает с торца упора и размещается над ним, останавливаясь в исходном положении, а упор перемещается в крайнее правое положение. При этом повороте рычага 21 фиксатор 16 выходит из зацепления с уступом 30 сектора 12 и последний под действием пружины поворачивается по часовой стрелке, возвращается в исходное положение. Одновременно с сектором 12 возвращается в исходное положение жестко связанные с ним вал 9 и поилка 1. При заходе в зону кормления следующего животного процесс повторяется аналогично описанному.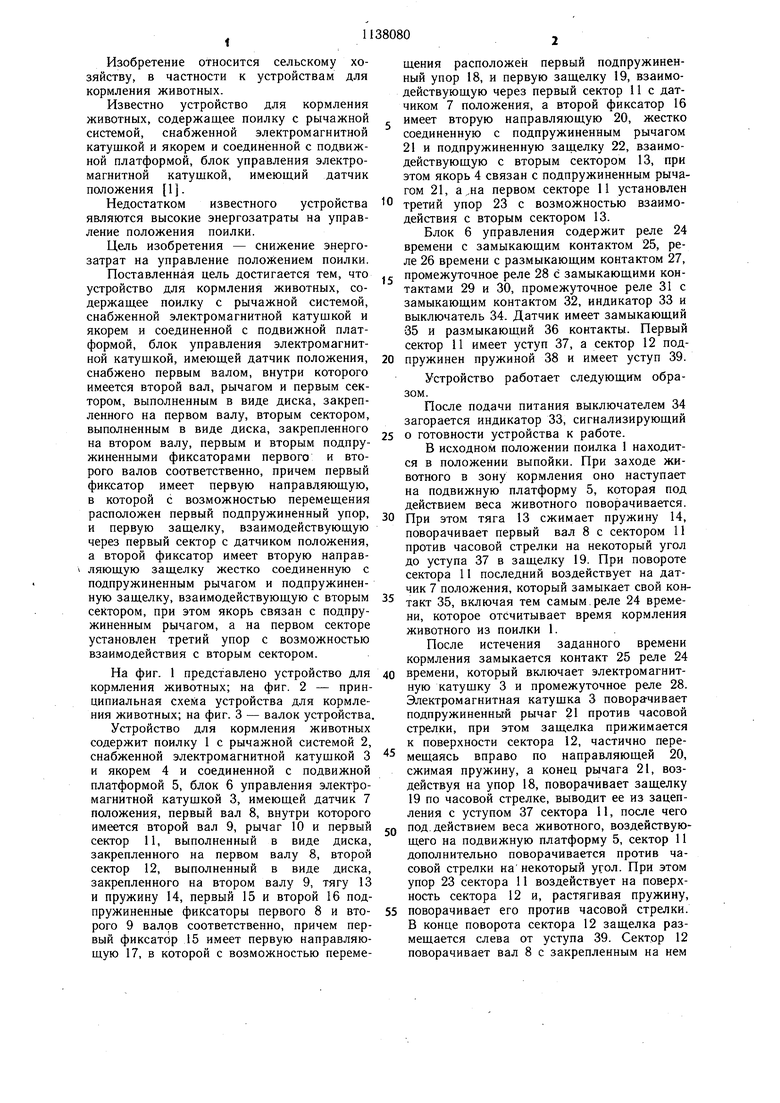
| название | год | авторы | номер документа |
|---|---|---|---|
| Командоаппарат | 1984 |
|
SU1399833A1 |
| АВТОМАТИЧЕСКАЯ РЕВОЛЬВЕРНАЯ ГОЛОВКА МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1971 |
|
SU297161A1 |
| Аппарат для контролирования правильности подачи листов и отделения незапечатанных и бракованных листов на листовых печатных машинах | 1961 |
|
SU145595A1 |
| Устройство для кормления животных | 1982 |
|
SU1026723A1 |
| Устройство для автоматической записи в станционном журнале | 1928 |
|
SU33571A1 |
| ИССЛЕДОВАТЕЛЬСКИЙ КОМПЛЕКС ДЛЯ БЕГУНОВ | 2001 |
|
RU2203710C2 |
| НИЗКОВОЛЬТНЫЙ МНОГОПОЛЮСНЫЙ СИЛЬНОТОЧНЫЙ ВАКУУМНЫЙ ВЫКЛЮЧАТЕЛЬ | 2004 |
|
RU2265254C1 |
| ВСЕСОЮЗНАЯ I !Ьу="^^ЙТ'''*1 ~r''"4!'!:iUie i мН i i.^ г si-J"! JiAjeifi irvnAn | 1973 |
|
SU378993A1 |
| Переключатель | 1973 |
|
SU513400A1 |
| Прибор для определения крутки пряжи | 1961 |
|
SU139860A1 |

УСТРОЙСТВО ДЛЯ КОРМЛЕНИЯ ЖИВОТНЫХ, содержащее поилку с рычажной системой, снабженной электромагнитной катушкой и якорем и соединенной с подвижной платформой, блок управления электромагнитной катушкой, имеюш,ей датчик положения, отличающееся тем, что, с целью снижения энергозатрат на управление положением поилки, оно снабжено первым валом, внутри которого имеется второй вал, рычагом и первым сектором, выполненным в виде диска, закрепленного на первом валу, вторым сектором, выполненным в виде диска, закрепленного на втором валу, первым и вторым подпружиненными фиксаторами первого и второго валов соответственно, причем первый .фиксатор имеет первую направляюш,ую, в которой с возможностью перемеш,ения расположен первый подпружиненный упор, и первую зашелку, взаимодействуюш,ую через первый сектор с датчиком положения, а второй фиксатор имеет вторую направляюшую, жестко соединенную с подпружиненным рычагом и подпружиненную заш,елку, взаимодействуюш,ую с вторым сектором, при этом якорь связан с подпружиненным рычагом, а на первом секторе установлен третий упор с возможностью взаимодействия с вторым сектором. 6
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3444967/30-15, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
