Известны аппараты для контролирования правильности подачи листов и отделения незапечатанных п бракованных листов на листовых печатных машинах, снабженных выравнивающими передними упорами, автомато-м бокового равнения и листовыводным устройством.
Предлагаемый аппарат, с целью повышения точности контролировакия, выиолнен s виде электроконтактного устройства для контролирования выравнивания листа ПО передним упорам, электроконтактных устройств для контролирования выравнивания по передним по упорам бокового равнения, фотоэлектрического устройства для контролирования двойного листа и печати «своя на свою, контрольно-блокируюш,ей электросхемы и устройства для отделения листов.
Устройство для контролирования выравнивания листа но передним упорам может быть выполнено в Виде установленного на корпусе упора, подвешенного на подпружиненной стойке щупа, взаимодействующего с кромкой листа, удерживаемой щупом пластинчатой пружины и включенных в контрольно-блокирующую схему электроконтактов, замыкаемых пластинчатой пружиной при неточном выравнивании листа на передней кромке.
Устройство для контролирования выравнивания листа по упорам автомата бокового равнения может быть выполнено в виде шарнирно установленных на корпусе автомата щупов, контролирующих переход или недоход листа относительно упсров, а также в виде кинематически связанных со щупаМи подпружиненного толкателя и электроконтактов, включенных в контрольно-блокирующую схему.
В состав контрольно-блокирующей схемы может быть введено коллекторное приспособление, выполненное в виде кулачкового диска, кине№ 145595 2
магически связанного с листовыводным устройством, и совокупности злектроконтактов, периодически замыкаемых кулачками и подпружиненными рычагами, установленлы.ми на диске.
Устройство для отделения листов может быть выполнено в виде включенного в контрольно-блокирующую схему электромагнита, якорь которого кинематически связан с кулачковой горкой, взаимодействующей с роликом каретки клапанов листовыводного устройства.
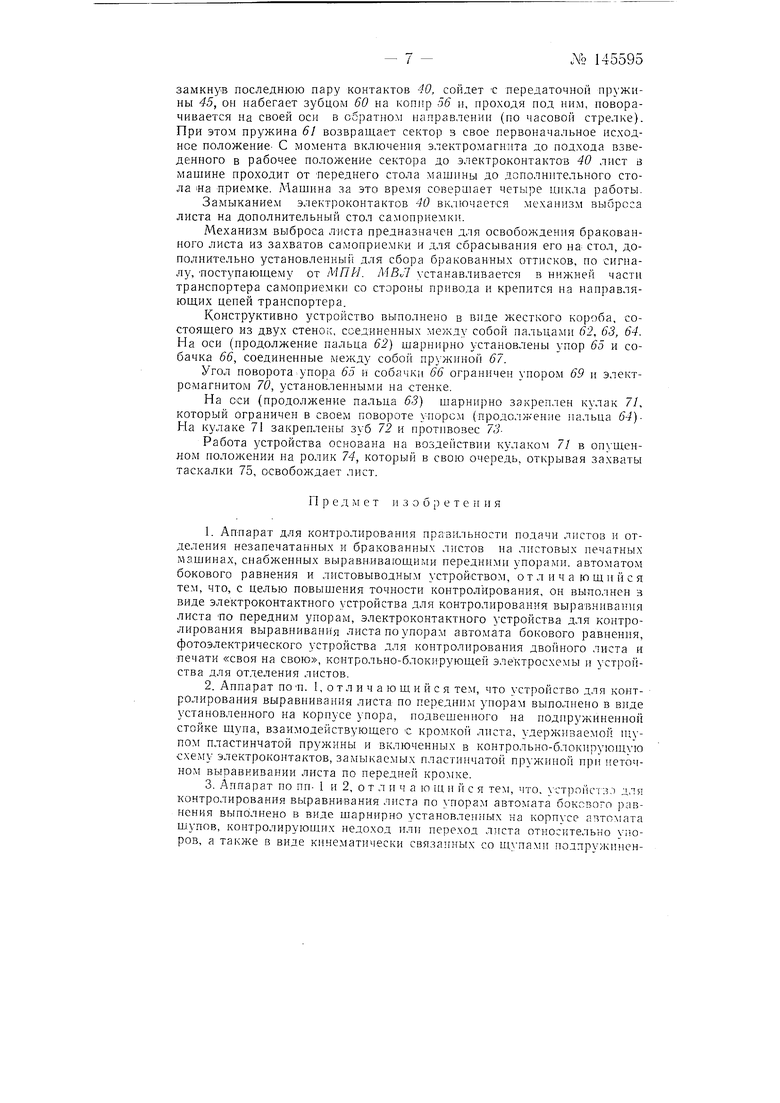
На фиг. 1 изображена схема электроко«тактного устройства для контролирования выравни-.за«ия листа по передним упорам; на фиг. 2 - то же, для контролирования выравнивания листа по упорам автомата бокового равнения; на фиг. 3 и 4 - фотоэлектрическое устройство для контролирования двойното листа и печати «своя на на фиг 5 - устройство для отделения листов; на фиг. 6 - устройство для выброса листов.
ЭлектрокОНтактное устройство для контролирования выравнивания листа ;по передним упорам включает -в себя два отдельных элемента: датчика, который монтируется на корпусе переднего упора /, и упора 2, который крепится к переднему столу 3 печатной машины.
Чувствительным элементом датчика является щуп 4, который посредством оси подвещен на стойке, шарнирно закрепленной на корпусе упора / и связанной с ним пружиной. Действие пружины на стойку ограничивается регулировочным винтом 5, которыйВвернут в Стойку и концом упирается В упор.
Так же На корпусе упора 1 крепятся пластинчатая пружина 6 и электрические контакты.
Во время работы печатной Машины передние упоры соверщают качательное движение. При подходе листа на передний стол мащины упоры поднимаются выше кромки стола и останавливаются, задерживая .лист для выравнивания. Затем, после тото, как лист выравнится и его возьмут качающиеся захваты, передние упоры опускаются, пропуская лист В машину- Вместе с упорами соверщают качательное движение и закрепленные на «их датчикиПри .движении в верхнее положение передний упор J несет датчик. При этом пластинчатая пружина 6 доходит до упора 2, упирается в него и отгибается.
После ОСтановки переднего упора е верхнем положениИ, щуп 4. под действием центра тяжести устанавливается в исходное положение так что его конец выстзпает за рабочую кромку переднего упора.
Электрические контакты 7 при этом разомкнуты.
К переднему упору подходит лист 8 и останавливается. Лист не касается щупа, так как в этот период выступающий за упоры конец щупа находится на 1,5-2 мм выше поверхности стола.
После выравнивания листа, когда он уже взят качающимися захватами, передний упор вместе с закрепленным на нем датчиком опускаетсиПри этом щуп, проходя мимо кромки листа, задевает за -нее и, псворачиваясь вокруг оси, отклоняется от своего исходного положения Пружина 6, ранее отогнутая пальцем упора, стремится разогнуться, но, встречая на своем пути конец отклоненного щупа, задерживается иа нем.
В этом случае щуп препятствует дальнейшему разгибанию пружины и, в свою очередь, пружина удерживает щуп в отклоненном положении.
Электрические контакты датчика по-прежнему остаются в разомкнутом положении.
Во время подъема переднего упора пружина упирается в палец упора и отходит от щупа. Освобожденный от пружины щуп при остановке упора принимает свое исходное положение.
В комплект устройства для контролирования выравнивания лйста по упорам автомата бокового равнения входят два датчика для правого к левого автоматов бокового равнения и тянущей рейки, присиособленыой для работы с автоматами бокового равнения.
Датчик состоит из двух щупов 9, их механизмов и группы электрических контактов, собранных на кронштейне 10. Один из щупов 9 является чувствительным элeмeнтo, контролирующим недоход листа до упора. Другой - чзвствительным элементом, контролирующим переход листа за уиор. Оба щупа имеют принциииально одинаковые по конструкции механизмыМеханизмы щупов состоят из подвесок /У плунжеров 12, двух пластинчатых пружин 13 и системы рычаговНа одном из концов подвесок на осях закреплены Н1упы .9. Другим концом подвески щарнирно кренятся иа кронщтейне Ю- На подвесках имеются регулировочные винты 14 .
Плунжер состоит из корпуса, в который вставлен толкатель 15 с пружиной 16, в которую ввернут регулировочный винт 17.
Плунжеры находятся в наиравляющих кронштейна и имеют возможность перемещения в осевом направлении.
На кронщтейне шарнирно, ;иосредством осей, закреплены рычаги 18, которые одним плечом у-пираются в регулировочные винты илунжера, другим, посредством шатунов 19, соединены с подвесками //
Во время работы печатной машины автомат бокового равнения соверщает качательное движение.
При подходе листа к передним упорам автомат бокового равнения поднят и лист свободно проходит под ним. Боковая кромка лнста при этом находится на 6-8 мм в стороне от уиора автомата.
После остановки листа автомат опускается и ложится своим упором на поверхность стола. При этом ролики автомата опускаются на лист и прижимают его к ползуну тянущей рейки 20. Движением рейки лист подтягивается к упору автомата. После выравнивания листа автомат поднимается, а рейка возвращается обратно. Так же совершает ка,чательное движение и датчик, закрепленный на корпусе автомата.
Автомат бокового равнения опускается на лист, лежащий под ним на переднем столе машины.
Вместе с автоматом опускается и закрепленный на нe датчик. При этом раньше чем автомат остановится в своем нижнем положении, в поверхность стола 21 упираются толкатели 15 плунжеров. При дальнейшем движении автомата толкатели через пружины 16 давят на корпусы плунжеров 12, перемещают их вдоль отверстий направляющих кронштейнов 10- При этом винты 17 давят на плечи рычагов 18, которые, поворачиваясь вокруг шарниров 22, другими своими плечами через шатуны 19 перемещ,ают нижние концы подвесок 11, а с ними и щупы 9 в направлении упора 23 автомата. В это время пружины/ сжимаются.
Перемещение щупов .происходит до тех пэр, иока регулировочные винты 14, сидящие в подвесках, своими концами не упрутся в кронштейн 10 (пока щупы не займут заданное положение под упором автомата) .
При движении автомата вниз регулировочные винты удерживают подвески от перемещения, и толкатели сжимают пружины 16 плунжеров. При этом щупы опускаются вместе с автоматом, не изменяя своего положения относительно упора.
- 3 -NO 145595
№ 145595 4 Автомат останавливается, опустившись своим упором на поверхность стола. Щупы находятся в пазу тянущей рейки и расположены горизонтально. Двин ением тянущей рейки лист подтягивается к упору автомата боковОГО равнения и останавливаетсяАвтомат бокового равнения поднимается с закрепленным на нем датчикомПри этом, ранее сжатые пружины J6 разжимаются- Плунжеры уиираются толкателями в поверхность сто.та, а винтами в дв плечие рычаги и удерживают подвески прижатыми к кронштейнуШупы, -поднимаясь вместе с автоматом, проходят мимо кромки листа и, в зависимости от расстояния листа до плоскости рабочей поверхности упора, задевают или не задевают за его кромку.
При этОМ, если щупы задевают за кромку л-иста. они поворачиваются на осях и отклоняются от своего первоначального горизонтального положения.
После того, как толкатели упрутся свонМИ заплечиками в основания плунжеров, пружины 16 перестают разжиматься; плунжеры перемещаются в направляющих кронштейна вниз и действием пружин 13 подвески, поворачиваясь на шарнирах, перемещают щупы от упора к пластинчатым пружинам.
Щупы, подходя к Пружинам в горизонтальном положении, нажимают на передаточные пружины и изоляционными сухар-иками замыкают систему электрических контактов.
Пружины фиксируют положение щупов и удерживают их в отклоненном положении.
Если лист, прИ его выравнивании, точно встал у рабочей поверхности бокового упора, то при подъеме автомата щуп 9 задевает за его -кромку и, поворачиваясь на оси, отклоняется от своего первоначального горизонтального положения, а второй щуп 9 не задевает за лист и остается в горизонтальном положении.
Принцип работы фотоэлектрического устройства основан на фотоэлектрическом эффекте собранных по мостовой схеме двух фотосопротивлений, работающих на сравнении листа, проходящего в машину, с эталонны.м листом контрольного фотосопротивления- Датчик имеет три фотосопротивления, которые работают в двух мостовых схемах.
В устройство входят два датчика КПЛ, которые работают совместно с правым и левым автоматами бокового равнения.
Датчик состоит из осветителя 24 рабочего фотосопротивления и электрической схемы.
Рабочее фотосопротивление 25 посредством панели 26 кронштейна 27 устанавливается на корпусе автомата бокового равнения.
Осветитель представляет собой корпус 28, в котором в патроне 29 установлена электролампвчка 30. Сверху корпуса в оправе монтируется собирающая линза 31. На корпусе, на двух поворотных кронштейнах 32, подпружиненных пружинами, устанавливаются контрольные фотосопротивленпя.
Корпус осветителя посредством кронштейна крепится на штанге под передним столом машины- В переднем столе в зонах работы автоматов бокового равнения вырезается щель, которая предназначена для прохода светового пучка от осветителя к рабочему фотосопротивлениюСхема мостов датчика КПЛ .работает на постоянном токе, питаясь от сети через трансформатор и выпрямитель 1ВС. Каждый датчик КПЛ включает две схемы мостов, в плечи которых включены фотосопротивления ФС/ и постоянные сопротивления. Рабочее фотосопротпв:1ение ФС2 в каждый рабочий цикл машины посредством цикловых контактов
и контактов реле размножителя 5РП переключается в смежные плечи, плечам ФС1 и ФСЗ, мостов, которые работают соответственно на контроль двойного листа и контроль положения листа.
В диагонали мостов включаются поляр1 зованные реле 1РП, 2РП с миллиамперметром 1МА; миллиамперметр нормально зашунтирован кнопкой /КЯ; 2КН и включаются прп регулировках. Для точной балансировки мОСтов в их схемах имеются переменные сопротивления.
Лампочка осветителя питается от трансформатора.
В комплекте имеются два датчика КПЛ, работающие при лечати «лица и прИ печати «оборота - Питание обоих схем выпрямителей (1ВС и 2ВС) осуществляется от трансформатора.
Во время приладок на различные форматы бумаги, при перестановке автомата бокового равнения необходимо также Произвести Перестановку и осветителя КПЛ. Для этого на кронштейне освобождается один из болтов И осветитель передвигается по штанге в нужное место, чтобы пучок света от лампочки попадал на окно рабочего фотосопротивления. После такого перемещения осветитель снова наделено закрепляется на штанге.
Для работы датчика на контроль поюжения листа необходимо чтобы на форме имеласьСпециальная метка, как было описано выше.
Перед первым листопрогоном в осветитель между лампой и контрольными фотосопротивлениями закладываются образцы той бумаги, которая -подготовлена для печатания.
Контролируется балансировка мостов по миллиамперметру/AL4. Во время работы машины лампочка осветителя включена и работает одновременно на трИ фотосопротивления, на контрольные фотосопротивления световой поток падает, проходя через эталоны, на рабочие - через щель в столе -и лист, проходящий в машину- При подходе листа к передним упорам он находится на расстоянии 6-8 мм от бокового упора автомата и его кромка не -перекрывает пучка света, проходящего через щель к рабочему фотосопротивленню- В это время на окно фотосолроти-вления падает весь -световой поток, проходящий через щель от осветителя. Рабочее фотосопротивление в это время цикловыми контактами механизма переноса импульса через контакты реле оРП и 5РП включено в мостовую схему, работающую по контролю двойного листа, и .поэтому большой световой поток, падающий на рабочее фотосопротивление, не вызывает срабатывание реле 2РП моста. Mexaннз ioм бокового выравнивания лист подтягивается к боковому упору и своей контрольной меткой перекрывает пучОК света, падающий на рабочее фотосопротивление. В это время цикловые контакты МПИ посредством контактов реле SPUz и SPU переключает рабочее фотосопротивление в схему моста, которая работает на контроль положения листа. Контакты 5Р/7б и SPfJi прерывают обходные цепи моСтов.
Если 1при подходе листа к боковому упору метки на листе не окажется, то через него на окно рабочего фотосопротивления ФС2 Пройдет соответственно больший световой поток. Сопротивление ФСо резко упадет. Мост .разбалансируется, реле 1РП выключит реле 1ГРП, которое подает в сеть /(PC сигнал о том, что лист идет в машину ненормально.
После выравнивания по унорам лист ношел в машину Метка выходит из-под фотосопротивления.
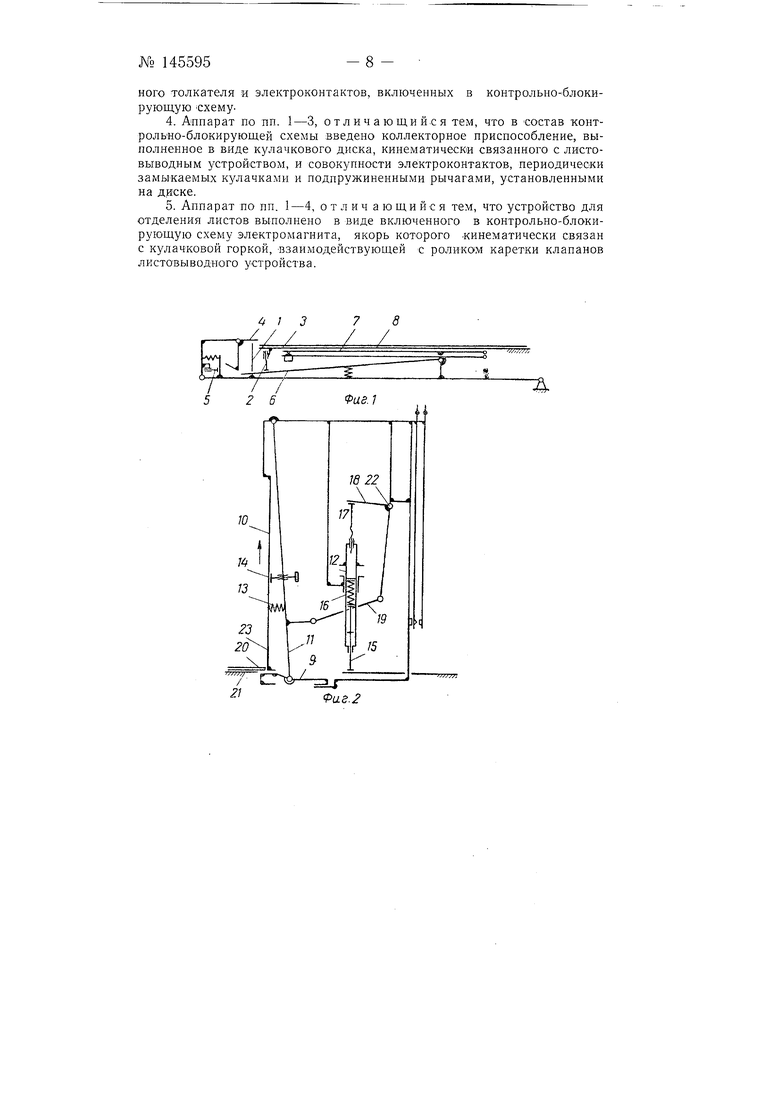
Механизм переноса импульса состоит из зубчатого колеса 33 с диском 34, которое закреплено на панел, и зубчатого колеса 35.
На панели также смонтированы электромагнит 36, двуплечая собачка 37, одно плечо которой является якорем электромагнита; пять групп
- 5 -№ 145595
№ 14.5595- 6 электрических .контактов 38, 39, 40, 41 и 42, собранных в группы вместе с передаточными пружинами 43, 44, 45, 46, 47, и защелка с возвратной пружиной 49.
На диске посредством пальцев 5( закреплены четыре сектора 57, которые пальцами а2 соединены с концами перекидных фиксирующих пружин, другими своими концами сидящих на пальцах 53, закрепленных на диске.
Секторы имеют возможность поворачиваться вокруг пальцев на угол, который ограничивается «ырезом в секторе и пальцами 54, закрепленными на диске. На диске также имеются четыре сухаря 55. На конце ОСИ закреплен копир 56.
МПИ крепится на станине прие.мки машины. При этом зубчатое колесо 33 вводится в зацепление с зубчатым колесом 35, которое посредством оси жестко соединено с торцовой частью оси звездочек цепного транспортера приемки мащиныВо время работы мащины зубчатое колесо 35, которое вращается вместе с осью звездоч«и цепного транспортера приемки, вращает находящееся в зацеплении с ним зубчатое колесо 33- Вместе с зубчатым колесом 33 вращается закрепленный на йем диск 34, который несет на себе сидящие на пальцах 50 четыре сектора 57.
За каждый цикл работы мащины зубчатое колесо 33 соверщает четверть оборота. Проходя в таком положении мимо групп электрических контактов 38, 39, 40, секторы не задевают за их передаточные пружины 43, 45, 44 и контакты этих групп не замыкаются. Собачка 37 упором 58 лежит на передаточной пружине 47 контактной группы и удерживается ею в нерабочем исходном полол ении. Жестко закрепленные на диске сухари 55 при каждой четверти оборота зубчатого колеса 33 набегают на передаточную пружину 46 группы электрических контактов 42 и замыкают ее. При этом происходит переключение рабочего фотосопротивления датчика /(ЯЛ с контроля метки на контроль двойного листа и обратно.
В том случае, когда какой-либо из датчиков устройства подаст имцульс электротока, электромагнит 36 притягивает плечо собачки 7, которая, псворачиваясь вокруг оси крепления, нажимает на упор 48 собачки 59, поворачивает ее против часовой стрелки, выходит из-под защелки 48 и встает в взведенное рабочее положение. Собачка 59, пропустив собачку 37, действием пружины 49 возвращается обратно и своей защелкой 48 встает под Собачку 37, удерживая ее в рабочем положении. Одновременно собачка 37 своим упором 58 нажимает на передаточную пружину 47, которая изоляционным сухариком замыкает контакты 41Проходящий мимо взведенной собачки 37 сектор 57 своим зубом 60 входит в зацепление с зубом собачки и поворачивается против часовой стрелки в рабочее положение. При этом пружина, псворачиваясь на пальцах 52, 53, сжимается и затем по ходу вращения сектора снова разжимается, заставляя его дойти до пальца 54.
После того, как сектор 1встанет в рабочее положение и выйдет из зацепления с зубом Собачки 37, очередной сухарь при Своем движении набегает на Собачку 59 и поворачивает ее вокруг оси крепления (против часовой стрелки). При этом упор выходит из-под собачки 37 и она действием пружины 47 снова встает в первоначальное исходное положение- Электроконтакты 41 размыкаются. Теперь при про.хождении мимо групп электроконтактов 38, 39, 40 взведенный ъ рабочее положение сектор набегает сухариком на передаточные пружины 43, 44, 45, нажимает на них и замыкает контакты. После того, как взведенный сектор.
замкнув последнюю пару контактов 40, сойдет с передаточной пружины 45, он набегает зубцом 60 на копир 56 и, проходя под ним, поворачивается на своей оси в обратном направлении (по часовой стрелке). При этом пружина 61 возвращает сектор з свое первоначальное исходное положение- С момента включения электромагнита до подхода взведенного в рабочее положение сектора до электроконтактов 40 лист в машине проходит от переднего стола машины до дополнительного стола «а приемке. Машина за это время совершает четыре цикла работы. Замыканием электроконтактов 40 включается механизм выГфоса листа на дополнительный стол самоприемк .
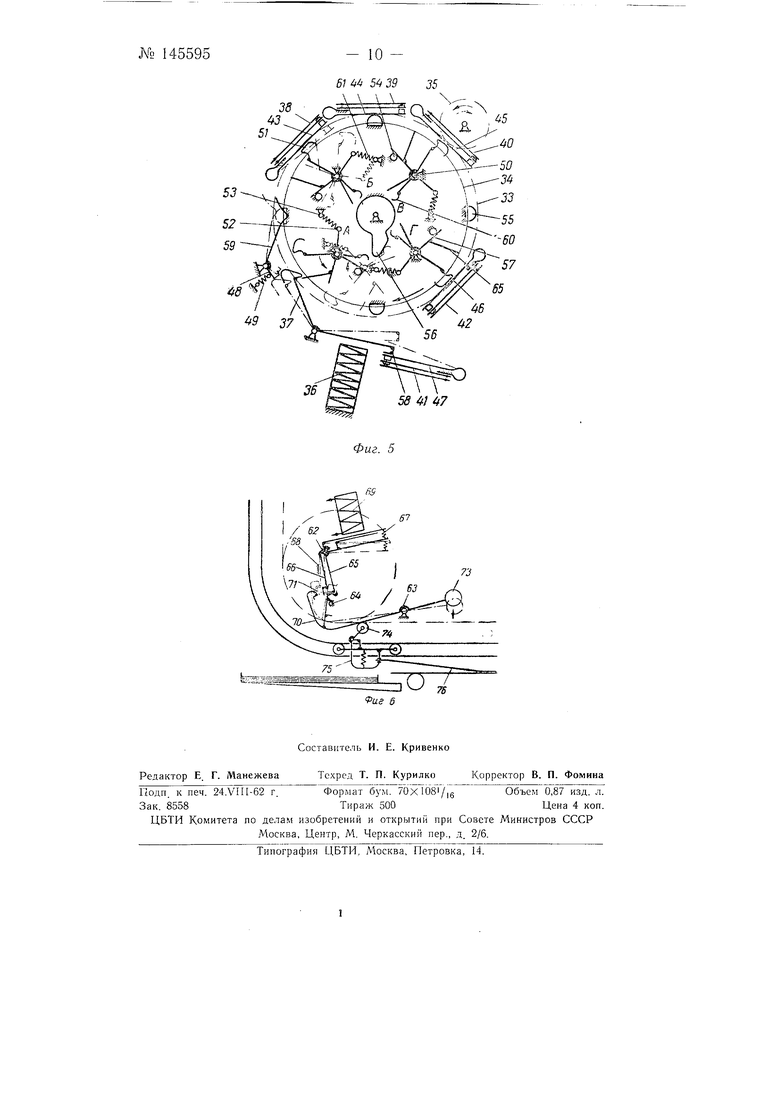
Механизм выброса листа предназначен для освобождения бракованного листа из захватов самоприемки и для сбрасывания его на стол, дополнительно установленный для сбора бракованных оттисков, по сигналу, Поступающему от МПИ. MBJI устанавливается в нижней части транспортера самоприемки со стороны привода и крепится на направляющих цепей транспортера.
Конструктивно устройство выполнено в виде жесткого короба, состоящего из двух стенок, соединенных между собой пальцами 62, 63, 64. На оси (продолжение пальца 62) шарнирно установлены упор 65 и собачка 66, соединенные между собой пружиной 67.
Угол поворота упора 65 и собачки бб ограничен упором 69 и электромагнитом 70, установленными на стенке.
На ОСи (продолжение пальца 63) шарнирно закреплен кулак 7/, который ограничен в своем повороте упором (продолжение пальца 64)На кулаке 71 закреплены зуб 72 и противовес ГоРабота устройства основана на воздействии кулаком 7/ в опушенном положении на ролик 74, который в свою очередь, открывая захваты таскалки 75, освобождает лист.
Пред м е т и з о б р е т е н и я
1.Аппарат для контролирования правильности подачи листов и отделения незапечатанных и бракованных листов на листовых печатных машинах, снабженных выравнивающими передними упорами, автоматом бокового равнения и листовыводным устройСтвом, отличающийся тем, что, с целью повышения точности контролирования, он выполнен з виде электроконтактного устройства для контролирования выравнивания листа ПО передним упорам, электроконтактного устройства для контролирования выравнивания листа по упорам автомата бокового равнения, фотоэлектрического устройства для контролирования двойного листа и печати «своя на свою, контрольно-блокирующей электросхемы и устройства для отделения листов.
2.Аппарат поП. 1, от л и ч а ю щ и и с я тем, что устройство для контролирования выравнивания листа по переднилг упорам выполнено в виде установленного на корпусе упора, подвешенного на подпружиненной стойке щупа, взаимодействующего с кромкой листа, удерживаемой щупом пластинчатой пружины и включенных в контрольно-блокируюи ую схему электроконтактов, замыкаемых пластинчатой пружиной при 1 еточном выравнивании листа по передпей кромке.
3.Аппарат по пп- 1 и 2, о т л и ч а ю щ и и с я тем, что. устройстзо для контролирования выравни вания листа по автомата бокового равнения выполнено в виде шарнирно установленных на корпусе автомата шупов, контролирующих недоход или переход листа относительно у;юров, а также в виде кинематически связанных со щупами подпружинен- 7 -№ 145595
Horo толкателя и электроконтактов, включенных в контрольно-блокирующую Схему.
4.Аппарат по пп. 1-3, отличающийся тем, что в состав контрольно-блокирующей схемы введено коллекторное приспособление, выполненное в виде кулачкового диска, кинематически связанного с листовыводным устройством, и совокупности электроконтактов, периодически замыкаемых кулачками и подпружиненными рычагами, установленными на диске.
5.Аппарат по пп. 1-4, отлич ающийся тем, что устройство для отделения листов выполнено в виде включенного в контрольно-блокирующую схему электромагнита, якорь которого .кинематически связан с кулачковой горкой, взаимодействующей с роликом каретки клапанов л и стовы в одно го уст рой ств а.

| название | год | авторы | номер документа |
|---|---|---|---|
| Фотоэлектрическое устройство для контроля правильности подачи листов на печатных машинах | 1955 |
|
SU104298A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ ХАЛ ИЗ ПРЕДВАРИТЕЛЬНО ЗАКАТАННЫХ ТЕСТОВЫХ ЖГУТОВ | 1963 |
|
SU223714A1 |
| Устройство для выравнивания листов в печатных машинах | 1978 |
|
SU925821A1 |
| Автоматическая линия изготовления жестяных консервных банок | 1986 |
|
SU1362550A1 |
| Устройство для передачи листа после его отделения от стопы в захваты цилиндра печатной машины | 1974 |
|
SU738913A1 |
| Скоропечатная типографская машина | 1935 |
|
SU57118A1 |
| Автоматизированная сборочная линия | 1985 |
|
SU1306691A1 |
| Автоматическая поточная линия для изготовления книг | 1986 |
|
SU1426848A1 |
| Машина для завертывания конфет в замок | 1937 |
|
SU60135A1 |
| АВТОМАТИЧЕСКИЙ МЕХАНИЗМ ЗАРЯЖАНИЯ ПУШКИ | 2001 |
|
RU2195617C1 |

Раг.
28 30 J/
P4
fuff.
