Я
СП
Ла.1
Изобретение относится к электротехнике, а именно, к средствам автоматизации производственных процессов. Командоапнарат может быть исцол зован для управления группой электрических, пневматических или гидравлически исполнительных механизмов, принадлежа- iiyix станку, манипулятору или другому цроизводствеиному агрегату.
Цель изобретения - упрощение конструкции.
Па фиг. 1 изображен командоаппа- рат, общий вид; на фиг. 2 - то же, вид спереди (без электромагнита, со срезом верхней части рычага); на фиг. 3 - электрическая схема командо аппарата; на фиг. 4 - командоанпа- рат , вид спереди.
Командоаппарат содержит группу коммутационных элементов 1, смонтированных на )1еподвижном основании. Они могут быть пневматическими, гидравлическими и электрическими в зависимости от вида энер1 ии, потребляемой исполнительными механизмами управляемого объекта.
Органы управления части коммутационных элементов 1 могут быть выполнены, например, в виде рычагов или толкателей 2, для управления которыми служг т кулачки 3 кулачкового вала 4. Вал А установлен на П-образной вилке 5. Якорь 6 включающего электромагнита 7 совершает возвратно-поступательное движение. Вилка 5 выпо нена в виде шарнира, ось 8 которого установлена в неподвижных опорах вращения 9. Концы вилки 5 выполнены как одно целое с осью 8 и являются опорами вращения вала 4.
Вилка 5 зафиксирована в исходном положении так, что между толкателями 2 и кулачками 3 имеется зазор, до
10
15
20
-
JQ99833
16 и теля
25
.35
40
токост.омная щетка 17 ггереключа- 18 цепей у11рлвле(тя. Фиксатор 15 подпруукииен пружиной 19, а собачка 12 выполнена с уступом 20 и хвостовиком 21 и является не только включающим приводом для кoм ryтaциoнныx элементов I, но используется и для приведения в действие движущего привода. Часть ходя его якоря 6 используется для взведения движущей пружины 10, а остальная часть хода - для нажатия на толкатели 2.
Это обеспечивает независимую работу включающего и движущего приводов, а командоаппарату - необходимую гибкость в управлении.
При работе аппарата в режиме проскока, когда работает только движущий привод, возможно случайное нажатие кулачковым валом на толкатели 2, т.е. ложное срабатывание аппарата, что может привести к аварии на управляемом объекте. Это может случиться, например, при неправильной регулировке, поломке прерывателя или движущей пружины 10.
Для исключения ложных срабатываний аппарата в кинематическую цепь, которая передает движение от магнита 7 к толкателям 2, введен ограничитель поступательного движения кулачкового вала, названный стопором. Прерыватель 22 снабжен пружинным фиксатором 23 и рукояткой 24. Электромагнит 7 получает питание (фиг. З) по цепи управления движущего привода, содержащей размыкающий контакт прерывателя 22, и по цепи управления включающего привода, содержащей замыкающий контакт реле 25. В обе цепи включены контакты контактной группы 26, служащей для включения проскока.
Обмотка реле 25 посредством пере


| название | год | авторы | номер документа |
|---|---|---|---|
| Командоаппарат | 1984 |
|
SU1399832A1 |
| Устройство для управления группой исполнительных механизмов | 1986 |
|
SU1345180A1 |
| Устройство для циклового программного управления | 1987 |
|
SU1603343A1 |
| Устройство для автоматической передачи по проводам на расстояние показаний метеорологических приборов | 1929 |
|
SU32963A1 |
| Счетно-контрольный сигнальный аппарат с печатающим приспособлением | 1933 |
|
SU49496A1 |
| УСТРОЙСТВО ДЛЯ СЧЕТА И ЗАПИСИ КОЛИЧЕСТВА СЛОЕВ НАВИВАЕМОЙ КАРТОННОЙ ПАПКИ | 1973 |
|
SU368631A1 |
| ФИКСАТОР ПОДВИЖНОГО ЗВЕНА МЕХАНИЗМА | 1992 |
|
RU2041519C1 |
| Устройство для подсчета неисправностей пути | 1939 |
|
SU57283A1 |
| Устройство коммутации электрических цепей | 1972 |
|
SU481949A1 |
| Счетная машина | 1934 |
|
SU49498A1 |


Изобретение относится к электротехнике и может быть использовано для управления группой электрических, пневматических или гидравлических исполнительных механизмов. Цель изобретения состоит в упрощении конструкции. Вилка 5 связана с кулачковым валом 4, кулачки 3 которого нозде 1- ствуют на коммутационные элементы. Поворот кулачкового влла на заланш п 7ГОЛ осуществляется с помощью храпо- зого механизма. Вилка 5 связана с включающим приводом - электромагнитом 7 через рычаг 35, которьп установлен с зазором относительно вилки 5. В устройстве имеется стопор 33, предназначенньп для исключения ложных срабатываний аппарата. 2 з.п.ф-лы, 3 ил.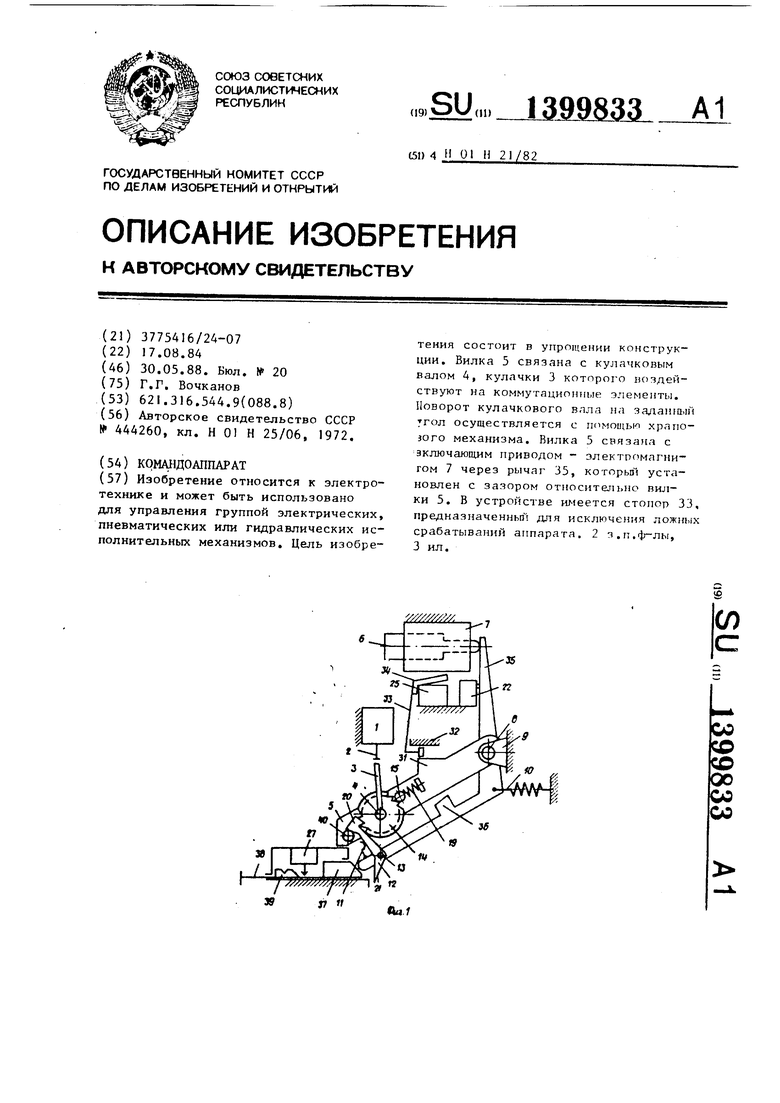
статочный для взведения движущей пру- . ключателя 27 режимов управления, кноп..
50
жины Го до соприкосновения кулачков 3 с толкателями 2.
Дпя автоматического поворота кулачкового вала 4 в любую позицию служит движущий привод, выполненный на базе храпового механизма, в котором вилка 5 выполняет функцию подвижного звена. Пружина 11 поджимает собачку 12, которая установлена на неподвижной оси 13 и взаимодействует с храповым колесом 14.55
На вилке 5 установлен ролик-фиксатор 15 храпового колеса 14, которое закреплено на валу 4, как и рукоятка
ки 28 Пуск, контакта контактной группы 29 запуска автоматического цикла и переключателя 18 соединена с цепями 30 управления исполнительных механизмов управляемого объекта.|
Контактные группы 26 и 29 входят в число коммутационных элементов 1, которые имеют защелки для удержания их во включенном положении.
Вилка 5 имеет выступ 31, против которого имеется неподвижный упор 32. В зазоре между выступом 31 и неподвижным упором 32 находится ограничитель движения вала 4 - стопор 33, .
ки 28 Пуск, контакта контактной группы 29 запуска автоматического цикла и переключателя 18 соединена с цепями 30 управления исполнительных механизмов управляемого объекта.|
Контактные группы 26 и 29 входят в число коммутационных элементов 1, которые имеют защелки для удержания их во включенном положении.
Вилка 5 имеет выступ 31, против которого имеется неподвижный упор 32. В зазоре между выступом 31 и неподвижным упором 32 находится ограничитель движения вала 4 - стопор 33, закрепленный на подвижном органе управления - якоре 34 промежуточного реле 25. Вилка 5 связана с якорем 6 электромагнита 7 посредством рычага 35, установленного на оси 8, Рычаг 33 подпружинен движущей пружиной 10, несет на себе собачку 12, взаимодействует с прерывателем 22 и посредством выступа 36 - с вилкой 5. Между толкателями 2 и кулачками 3 минимальньй зазор, а между выступом 36 и вилкой 5 имеется зазор, величина которого достаточна для взведения движущей пружины 10 до момента соприкосновения вь ступа 36 с вилкой. Рычаг 35 введен для уменьшения амплитуды движения вилки 5.
Для перевода командоаппарата в состояние готовности работы в наладоч ном режиме служит механизм расцепления. Он выполнен в виде кулачка 37, снабженного рукояткой 38, на которой закреплен кулачок 39 для переключателя 27 режимов работы. Рукоятка имеет два положения: Автоматическая работа и Наладка. На фиг. 1 механизм показан в первом положении.
Кулачок 37 взаимодействует с концо рычага 35 и с хвостовиком 21 собач- ки 12.
Целесообразно выполнить упор АО, закрепленный на вилке 5. Упор 40 исключает отклонение собачки от храпового колеса 14 и тем самым - произволный поворот колеса 14 по инерции, что обеспечивает точную фиксацию храпового колеса 14, ас ним вала 4 и щетки 17 после каждого срабатывания движу- щего привода.
Включающий привод может быть не только электромагнитным, ио и пневматическим, а иногда - гидравлическим
Комаидоаппарат работает следующим образом.
При автоматическом режиме рукояткой 16 поворачивают кулачковый вал 4 в первую позицию, рукояткой 38 устанавливают кулачок 37 в положение Автоматическая работа, при котором контакт переключателя 27 замыкается, и нажимают на кнопку 28. Управляющий сигнал, пройдя через соответствующую цепь 30, щетку 17, размыкающий контакт контактной группы 29 и кнопку 28,включает реле 25, контакт которо- го включает электромагнит 7,
Якорь 6 электромагнита 7, взаимодействуя с рычагом 35, поворачивает
д 5
Q
5
0
5
в uiapuiipax 9 яилку 5, коч орая почти поступательно поднимает кулачковьп1 вал 4 с храполым колесом 1А, при этом кулачок 3 проходит зазор, а собячка 12 западает за очередпой чуб колеса 14, далее кулачок 3 нажимает на толкатель 2 контактной грутпгы 29. Замыкающий контакт контактной i-руппьг 29 шунтирует кнопку 28, один размыкающий контакт этой группы отключает ее от схемы, а второй (не показан) размыкает цепь 30 и тем отключает реле 25 и электромагнит 7. Под действием пружины 10 и своего веса вилка 5 возвращается в исходное положение. При ходе вниз кулачок 3 освобождает толкатель 2, т.е. оставляет его установленным на защелку, а собачка 12 зацепляется за очередной зуб колеса 14 и, опираясь нп него поворачивается на одни шаг, переводя кулачковый вал 4 и щетку 17 в следующую позицию. В этой позиции реле 25 получает питание от следующей цепи 30 через щетку 17, замыкающий контакт Группы 29 и переключатель 27, в результате чего включается соответствующий коммутационный элемент I, который подает энергию на соответствующий исполнительный механизм, приводящий в действие соответствующий рабочий орган управляемого объекта, который, отработав свое, нажимает на конечный выключатель, размыкающий iцeпь 30,и тем самым отключаю1(шй реле 25. Механизм командоаппарата срабатывает, поэтому после отключения реле 25 коммутационный элемент 1 отключается, а кулачковый вал 4 и щетка 17 Оказываются в третьей позиции , где включается следующий по циклограмме исполнительный механизм. Поэтапная отработка цикла продолжается до тех пор, пока не будет нажат толкатель 2 контактной группы 26 проскока. Установленная на защелку контактная группа 26 подключает прерыватель 22 к-электромагниту 7, которьй включается, сообщает вилке 5 движение вверх и отключается в начале этого движения контактом прерывателя 22. Электромагнит 7 теряет питание, а взведенная пружина 10 обеспечивает Поворот кулачкового вала 4 в следующую позицию. Прерыватель 22, вернувшись в исходное состоя)1ие, вновь включает электромагнит 7. Далее колебательное движение вилки 5 и, следовлтелыю, вращение нала 4 продолжается, пока кулачковый вал А не оспобо- дит контактную группу 26 от защелки, после чего электромагнит 7 вновь пе- реклю ается на управление от реле 25, При работе в режиме проскока случайное включение коммутационных элементов 1 невозможно , так как ход кулачкового вала 4 вверх ограничен неподвижным упором 32, Автоматическая работа прекращается при отключении контактной группы 29,
При поэтапной отработке цикла якорь 34 включенного реле 25 отводит стопор 33 от выступа 3) и замыкает свой контакт в цепи электромагнита 7, якорь 6 которого поворачивает на оси 8 рычаг 35, которьй переводит собачку 12 за очередной зуб колеса 14, за- 20 Установлена так, что имеется зазор тем нажимает выступом 36 на вилку 5 и тем самым включает коммутационный элемент 1, После отключения реле 25 размыкается его контакт, а стопор 33 попадает на вертикальную грань выступа 31, электромагнит 7 отключается, вилка 5 возвращается в исходное
25
между толкателями коммутационных эл ментов и кулачками кулачкового вала движущий привод, включающий подпружиненную собачку, храповое колесо, установленное на кулачковом валу, движущую пружину и прерыватель, вкл ченный в цепь управления движущим приводом, отличающийся тем, что, с целью упрощения констру ции, он снабжен ограничителем движе ния кулачкового вала, подвижным рыч гом, который подпружинен движущей п жиной и установлен с зазором относи тельно вилки с возможностью взаимодействия с прерывателем, подпружине ная собачка установлена на подвижно рычаге, через который вилка связана с включающим приводом и имеет возмо ность взаимодействия с ограничителе . движения кулачкового вала, а цепь у равления движущим приводом подключе к включающему приводу.
положение, стопор 33 под действием пружины якоря 34 возвращается в зазор между выступом 31 и упором 32.-Рычаг 35 под действием взведенной пружины 10 посредством собачки 12 поворачивает колесо 14 и с ним вал 4 на один шаг.
При работе в режиме проскока реле 25 выключено, поэтому стопор 33 препятствует ходу вилки 5 вверх в тех случаях, когда электромагнит 7 подает на рычаг 35 больщий импульс движения, чем это требуется для поворота кулачкового вала 4,
При переключении рукояткой 38 на наладочный режим работы кулачок 37, двигаясь вправо, поднимает конец рычага 35, затем, нажимая на хвостовик собачки 12, отводит ее от колеса 14. Далее работа производится аналогично С той разницей, что при движении вилки 5 ввепх и вниз хвостовик собачки 12 постоянно взаимодействует со скошенной гранью кулачка 37, что препятствует ее сцеплению с колесом 14, а стопор 33 не мешает движению вилки 5, так как реле 25 включается прежде, чем начинается это движение.
98336
Командоаппарат может не иметь промежуточного реле 25, если датчик управляемого объекта по мощности соответствует электромагниту 7, или это реле может быть в бесконтактном исполнении ,
10
Формула изобретения
1, Командоаппарат, содержащий неподвижное основание, группу коммутационных элементов, каждый из которых имеет толкатель, включающий механизм, выполненный в виде кулачкового вала, который связан с П-образной подвижной вилкой, включающий привод, связанный с указанной вилкой, которая
Установлена так, что имеется зазор
между толкателями коммутационных элементов и кулачками кулачкового вала, движущий привод, включающий подпружиненную собачку, храповое колесо, установленное на кулачковом валу, движущую пружину и прерыватель, включенный в цепь управления движущим приводом, отличающийся тем, что, с целью упрощения конструкции, он снабжен ограничителем движения кулачкового вала, подвижным рычагом, который подпружинен движущей пружиной и установлен с зазором относи- тельно вилки с возможностью взаимодействия с прерывателем, подпружиненная собачка установлена на подвижном рычаге, через который вилка связана с включающим приводом и имеет возможность взаимодействия с ограничителем движения кулачкового вала, а цепь управления движущим приводом подключена к включающему приводу.
16
т
фи.г.2
.25 , уд 7
- -тоZO
Фиг.З
Ч х /
12
0«/.4
19 20
| Коммутатор электрического тока | 1972 |
|
SU444260A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
