Изобретение относится к области моделирования автоматов подачи долота при бурении погружными двигателями.
Обычно автоматы подачи долота отрабатываются и настраиваются в натуре, что требует затраты значительных средств и времени. Теоретический анализ работы автомата не удается вследствие того, что объект регулирования представляет систему с распределенным, постоянным и сухим трением, причем граничные условия для элементов системы могут меняться в широких пределах.
Описываемое изобретение устраняет неудобства и недостатки существующих способов отработки и наладки автоматов и заключается в том, что, с целью упрощения и ускорения процесса наладки автомата, предлагается динамическая модель, с помощью которой можно в лабораторных условиях отрабатывать автоматы подачи долота, моделируя пружиной колонну бурильных труб
различной длины, и воспроизводить различные режимы бурения.
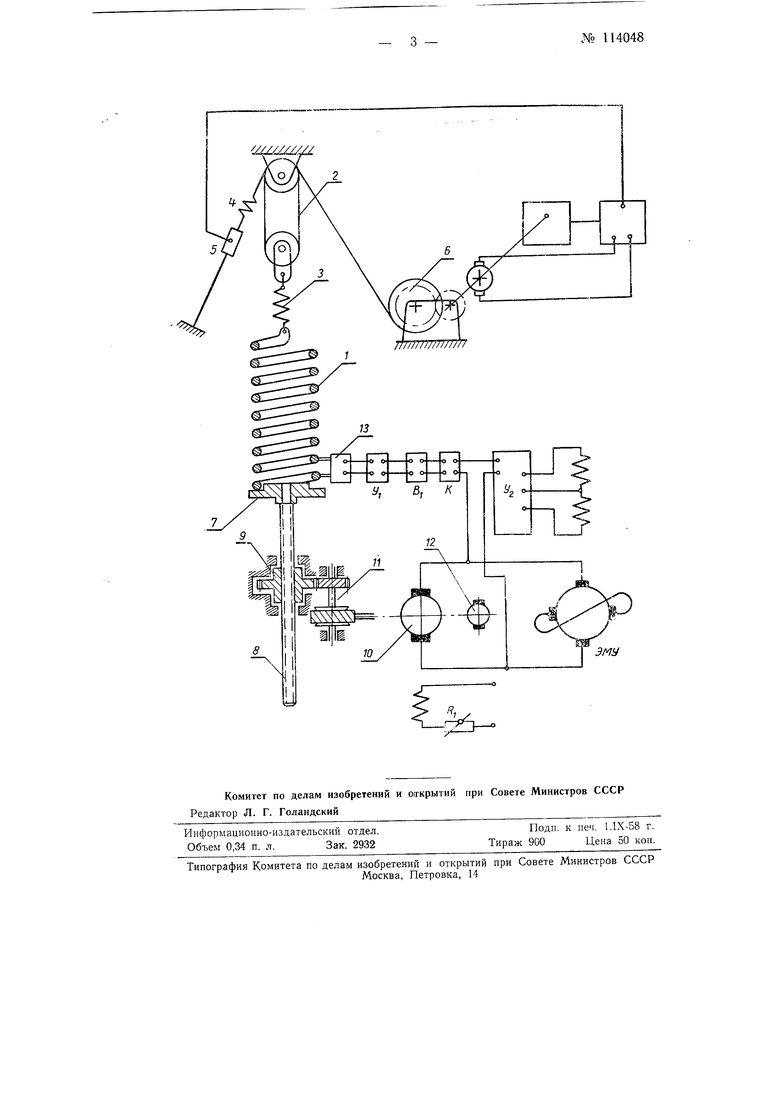
На чертеже изображена схема модели.
Пружина /, моделирующая колонну бурильных труб и имеющая частоту собственных колебаний, равную частоте колебаний реальной колонны, подвешена с помощью талевой системы 5. Для изменения длины моделируемой колонны часть нижних витков пружины / выключается путем механического сжатия и неподвижного закрепления. Пружины 5 и 4, моделирующие жесткость талевой системы, встроены в грузовую ветвь и в мертвый конец талевой системы, причем пружина 3, с целью компенсации изменения длины каната, выполнена с регулируемой длиной.
На мертвом конце каната установлен датчик 5 веса, ходовой конец каната укреплен на барабане модели лебедки 6.
Модель лебедки снабжена барабанным валом и валом податочного
устройства, связанным с первым зубчатой передачей.
Нижний виток пружины прикреплен к планшайбе 7 и вертикальному ходовому винту 8. Гайка 9 ходового винта приводится в движение двигателем постоянного тока W через зубчатую передачу //
На валу двигателя устаповлен датчик скорости бурения 12.
На двух нижних витках установлены под углом 120 три индукционных датчика J3 перемещения. Напрял епие, снимаемое с датчиков 13, зависит от относительного перемещения витка, которое пропорционально усилию в нижней части бурильной колонны, т. е. нагрузке на долото. При выбранных масштабах каждый миллиметр сжатия витков пружины соответствует 0,3 т. Применение трех датчиков, расположенных под углом, обусловлено необходимостью в компенсации возможных перекосов. Якорь двигателя соединен с электромашинным усилителе : ЭМУ, обмотки управления которого подключены к электронному усилителю Уг.
Модель работает следующим образом.
Напряжение переменного тока, снимаемое с датчиков нагрузки на долото, усиливается усилителем У, выпрямляется выпрямителем Bi, и затем подается на делитель К- После делителя К разность напрялсепий сигнала обратной связи подается на вход балапсного усилителя У постоянного тока. На выходе усилителя У2 дифференциально включены обмотки управления ЭМУ.
Такая схема обеспечивает быстрое и однозначное преобразование напряжения, зависящего от пагрузки на долото и скорости нижнего конца колонны.
Датчики /5 дают возможность задавать в модели различные линейные и нелинейные законы изменения скорости бурения от нагрузки на долото, свойственные турбинному электробурению
Для изменения скорости бурения в широком диапазоне предусмотрены делитель напряжения К, реостат в цепи возбуждения двигателя R, а также возможность смены шестерен в зубчатой передаче //.
Предмет изобретения
1.Динамическая модель бурильного инструмента для отработки автоматов подачи долота при бурении погружными двигателями, отличающаяся тем, что, с целью обеспечения возможности отработки автоматов подачи долота в лабораторных условиях, модель колонны бзфильных труб выполнена в виде пружины, верхний конец которой подвешен к талевой системе, а нижний ее конец соединен через планшайбу с ходовым винтом, приводимым через гайку в поступательное движение электродвигателем постоянного тока, управляемым через электронное устройство напряжением, снимаемым с индукционных датчиков, укрепленных на двух нижних витках прзжины.
2.Форма выполнения динамической модели по п. I, отличающая с я тем, что, собственная частота колебаний пружины равна частоте колебаний реальной колонны бурильных труб.
3.Форма выполнения динамической модели по п. 1, отличающаяся тем, что моделирование изменения длины колонны производится выключением части нижних витков пружины путем их сжатия и неподвижного закрепления.