Изобретение относится к электротехнике, а именно к устройствам для регулирования двигателей.
Известно устройство для регулирования числа оборотов и момента электропривода, содержащее задатчик нагрузки на долото, датчик тока, датчик скорости и датчик веса [1]
Недостатками устройства являются, во-первых, его невысокая надежность из-за наличия датчика веса на неподвижном конце талевого каната регулятора подачи долота, необходимость снятия датчика веса при замене каната и частых перепусках и последующая тарировка измерительных устройств создают эксплуатационные неудобства; во-вторых, неоднозначность показаний датчика веса на неподвижном конце талевого каната при одном и том же усилии на крюке для режимов подъема и подачи (например, при переходе с подачи на подъем датчик веса показывает меньший вес, а при переходе с подъема на подачу больший), возникающая из-за наличия сил трения в системе, эквивалентная сигналу положительной обратной связи, что может привести в ряде случаев к неустойчивой работе регулятора подачи долота и автоколебаниям при малых скоростях бурения; в-третьих, низкая точность измерений датчика веса из-за наличия сил трения в системе, что вызывает снижение точности поддержания заданной нагрузки на долото.
Известно устройство для регулирования числа оборотов и момента электропривода, содержащее задатчик нагрузки на долото, датчик тока и датчик скорости. Устройство также содержит регулятор тока, регулятор скорости, регулятор веса и датчик статического тока [2] Задатчик нагрузки на долото соединен с входом регулятор веса, второй вход которого соединен с выходом датчика веса, а к выходу регулятора веса подключен первый вход регулятора скорости, второй вход которого связан с датчиком скорости, регулятор тока соединен одним из входов с выходом регулятора скорости, а второй вход его подключен к выходу датчика тока. К выходу регулятора тока подключается преобразователь, питающий двигатель регулятора подачи долота.
Недостатками данного устройства являются, во-первых, значительная динамическая ошибка по нагрузке на долото при возмущениях по каналу нагрузки из-за невозможности снизить этот показатель качества работы регулятора подачи долота вследствие значительной разницы в постоянных времени электромагнитного и механического звеньев электропривода, поскольку увеличение коэффициента в форсирующей части регулятора веса, регулирующего по пропорционально-интегральному закону, которое могло бы улучшить рассматриваемый показатель, приводит к существенному ухудшению электромагнитных переходных процессов; во-вторых, низкое быстродействие электропривода при реакции на возмущающее воздействие из-за значительной разницы в постоянных времени электромагнитного и механического звеньев электропривода, поскольку увеличение коэффициента в форсирующей части ПИ-регулятора веса, которое могло бы улучшить рассматриваемый показатель, приводит к существенному ухудшению электромагнитных переходных процессов; в-третьих, дополнительный износ элементов колонны бурильных труб из-за колебательного характера процессов при возмущениях по каналу нагрузки при применяемой настройке регулятора веса; в-четвертых, значительные перегрузки долота, приводящие к снижению его износостойкости, и значительные недогрузки, снижающие производительность буровых работ, возникающие из-за неизбежного запаздывания, с которым электропривод реагирует на приложение нагрузки, поскольку в системе с распределенными параметрами электропривод регулятора подачи долота талевая система колонна бурильных труб (электромеханическая система) устройство для регулирования числа оборотов и момента электропривода не только с запаздыванием воспринимает информацию об изменении нагрузки, но и воздействует на рабочий инструмент через конечное время прохождения сигнала по трубам.
Вследствие указанных недостатков долото в процессе работы испытывает значительные механические перегрузки и быстро изнашивается. Необходимость частой смены долота и выполнения соответствующих спуско-подъемных операций снижает производительность буровых операций. Работая в твердых слоях, при дополнительном увеличении твердости породы и, следовательно, динамическом возрастании нагрузки на долото породоразрушающий инструмент не только сам испытывает перегрузки, но и передавливает разбуриваемую породу, что отрицательно сказывается на эффективности бурения.
Технический результат, на достижение которого направлено изобретение, заключается в улучшении качества регулирования электропривода за счет формирования динамических характеристик электропривода, обеспечивающих оптимальные условия отработки породоразрушающего инструмента вследствие снижения динамической ошибки регулирования и увеличения быстродействия системы, а также повышение за счет этого производительности буровых работ.
Указанный результат достигается тем, что устройство для регулирования числа оборотов и момента электропривода, содержащее задатчик нагрузки на долото, датчик тока и датчик скорости, снабжено микропроцессорным комплектом, выполняющим функции регулирования осевой нагрузки на долото, числа оборотов и тока двигателя электропривода, входы этого комплекта соединены с задатчиком нагрузки на долото, датчиком тока и датчиком скорости, к выходу которого подключается преобразователь, питающий двигатель, при этом микропроцессорный комплект выполнен с возможностью реализации алгоритма регулирования осевой нагрузки на долото в регуляторе подачи долота, алгоритма определения статического тока двигателя и алгоритма вычисления управляющего воздействия в подпрограмме регулирования осевой нагрузки на долото. Для дополнительного контроля осевой нагрузки на долото это устройство может быть снабжено датчиком веса, соединенным с входом микропроцессорного комплекта.
На фиг. 1 изображена функциональная схема устройства для регулирования числа оборотов и момента электропривода регулятора подачи долота, на фиг.2 - алгоритм программы регулирования осевой нагрузки на долото в регуляторе подачи долота, на фиг.3 алгоритм работы подпрограммы "Определение статического тока двигателя", на фиг.4 алгоритм вычисления управляющего воздействия в подпрограмме регулирования осевой нагрузки на долото.
Устройство для регулирования числа оборотов и момента электропривода регулятора подачи долота содержит задатчик 1 нагрузки на долото, датчик 2 тока, датчик 3 скорости и микропроцессорный комплект 4 (фиг.1). Вход 1 микропроцессорного комплекта 4 соединен с датчиком 1 нагрузки на долото, вход 2 с датчиком 2 тока, вход 3 с датчиком 3 скорости. К выходу микропроцессорного комплекта 4 подключают преобразователь 5, питающий двигатель 6 электропривода.
Микропроцессорный комплект выполняет функции регулирования осевой нагрузки на долото, числа оборотов и момента двигателя. В качестве микропроцессорного комплекта может быть использован микропроцессорный комплект, например, МК-51 [3] Устройство для регулирования числа оборотов и момента электропривода может быть использовано для регулятора подачи долота с двигателем как постоянного, так и переменного тока.
Устройство для регулирования числа оборотов и момента электропривода регулятора долота работает следующим образом. При изменении нагрузки на долото (не показано) вследствие изменения твердости разбуриваемой породы изменяются также скорость подачи (число оборотов двигателя 6) и ток двигателя 6. Информация об изменении последних двух параметров поступает в микропроцессорный комплект 4 через соответственно датчик 3 скорости и датчик 2 тока. Информация о текущем значении нагрузки на долото вычисляется программно по сигналу с датчика 2 тока. Так, при увеличении нагрузки на долото сигнал с датчика 2 тока в среднем уменьшается. Микропроцессорный комплект 4 определяет с помощью этого вычисленного значения факт увеличения нагрузки и по заложенному в него алгоритму (см. фиг.2) вырабатывает и выдает на преобразователь 5, питающий двигатель 6, такое управляющее воздействие, которое приводит нагрузку на долото в соответствие с установленным на задатчике 1 нагрузки на долото значением. При этом сигнал с датчика 2 тока увеличивается, а сигнал с датчика 3 скорости уменьшается. Процесс регулирования завершается в том случае, когда вычисленное микропроцессорным комплектом 4 через сигнал с датчика 2 тока значение нагрузки на долото с требуемой по условиям регулирования точностью совпадает с сигналом с задатчика 1 нагрузки на долото. При снижении нагрузки на долото вследствие какого-либо возмущения изменение сигналов с датчика 2 тока и датчика 3 скорости противоположно описанному ранее.
Ниже подробнее рассмотрена работа устройства для регулирования числа оборотов и момента электропривода регулятора подачи долота. Программа регулирования осевой нагрузки на долото, заложенная в микропроцессорный комплект 4, включает в себя подпрограмму "Определение статического тока двигателя", подпрограмму регулирования нагрузки на долото, подпрограмму регулирования числа оборотов двигателя и подпрограмму регулирования тока двигателя. При включении устройства программа регулирования осевой нагрузки на долото инициализирует используемые ею переменные. На задатчике 1 нагрузки на долото устанавливается заданное (технологически оптимальное) значение нагрузки на долото. Колонна бурильных труб (не показана) растормаживается и движется к забою. При этом в подпрограмме (см. фиг.3) "Определение статического тока" вычисляется и в микропроцессорном комплекте 4 запоминается полный вес колонны до соприкосновения с забоем. Это значение используется при вычислении нагрузки на долото. Осевая нагрузка на долото является разностью между полным весом колонны до соприкосновения с забоем и усилием на крюке. Поэтому для определения текущего значения осевой нагрузки вычитают текущее значение веса, вычисленное подпрограммой "Определение статического тока", из зафиксированного значения полного веса колонны бурильных труб до соприкосновения с забоем (см. фиг.2).
При касании долотом забоя (не показан), равно как и при увеличении твердости разбуриваемой породы, вес на крюке начнет уменьшаться, а нагрузка на долото увеличиваться, что определено вышеуказанным путем (см. фиг.2). В этом случае число оборотов двигателя 6 при подаче уменьшается до тех пор, пока нагрузка на долото не достигнет значения, близкого к заданному, и установится режим бурения, при котором скорость подачи долота равна скорости бурения. Это достигается тем, что ошибка по осевой нагрузке, вычисленная как сумма текущего значения нагрузки на долото с преобразованным в цифровую форму и инвертированным сигналом задания, при увеличении нагрузки будет положительна. В соответствии с этой ошибкой подпрограмма регулирования осевой нагрузки на долото (см. фиг.2) по описанному ниже алгоритму (фиг.4) вырабатывает управляющее воздействие.
Это управляющее воздействие за вычетом сигнала обратной связи по числу оборотов двигателя 6, измеренного датчиком 3 скорости и преобразованного в цифровую форму, определяет сигнал ошибки по скорости подачи (т.е. при спуске) колонны бурильных труб. При превышении нагрузкой на долото заданного значения этот сигнал будет положительным, а равновесие будет достигнуто в том случае, когда изменяющийся сигнал на выходе датчика 3 скорости совпадет со значением сигнала скорости, заданного подпрограммой регулирования осевой нагрузки на долото. Вычисленная ошибка отрабатывается подпрограммой регулирования числа оборотов двигателя (ПРЧОД), показанной на фиг.2. Управляющее воздействие, вырабатываемое этой подпрограммой, может быть вычислено при использовании пропорционального (П), пропорционально-интегрального (ПИ) или пропорционально-интеграль но-дифференциального (ПИД) алгоритмов регулирования [4]
При изменении тока (или момента) электродвигателя 6 изменяется сигнал на выходе датчика 2 тока, причем если при установившемся состоянии системы этот сигнал только положителен, то в динамике он может изменять свой знак (при использовании реверсивного преобразователя 5). Измеренное датчиком 2 тока и преобразованное в цифровую форму текущее значение тока (или момента) двигателя 6, будучи вычтенным из управляющего воздействия, вырабатываемого подпрограммой регулирования числа оборотов электродвигателя (см. фиг.2), дает величину ошибки по току, которая при превышении нагрузкой на долото заданного значения будет положительна, а в установившемся состоянии электромеханической системы равна нулю. В соответствии с этой ошибкой подпрограмма регулирования тока (или момента) двигателя 6 (ПРТД), показанная на фиг.2, по П-, ПИ- или ПИД-законам управления вычисляет управляющее воздействие в микропроцессорном комплекте 4, которое после выдачи его в порт ввода-вывода микропроцессорного комплекта 4 подается на вход преобразователя 5 (если система импульсно-фазового управления преобразователя не является цифровой, то данный сигнал должен быть преобразован в аналоговую форму).
Поскольку при превышении нагрузкой на долото заданного значения управляющее воздействие, подаваемое с выхода микропроцессорного комплекта 4 на вход преобразователя 5, имеет положительный знак, то оно приводит к увеличению момента двигателя 6 и соответственно к подтормаживанию опускаемой колонны (снижению скорости спуска колонны бурильных труб). Если имеет место резкое увеличение твердости разбуриваемой породы, то момент двигателя 6 может даже превысить момент нагрузки, определяемый в значительной степени весом колонны, что приведет к кратковременному приподъему долота, предотвращающему чрезмерное увеличение нагрузки на долото.
При попадании долота из твердой породы в более мягкую в первый момент времени нагрузка на долото несколько уменьшается, и под воздействием управляющего воздействия с микропроцессорного комплекта 4 возрастает скорость подачи долота до такого значения, при котором установится режим бурения с большей скоростью при нагрузке на долото, близкой к заданной, что и будет обеспечено изменением знаков ошибок, отрабатываемых подпрограммой регулирования осевой нагрузки на долото, подпрограммой регулирования числа оборотов двигателя и подпрограммой регулирования тока двигателя (см. фиг. 2).
Как уже отмечалось, все колонны бурильных труб определяются подпрограммой "Определение статического тока" (см. фиг.3), которая работает по следующему алгоритму. Используется тот факт, что вес колонны достаточно точно соответствует натяжению ходовой ветви талевого каната (не показан), пропорциональному статическому току (моменту) электродвигателя 6. Текущее значение тока двигателя 6, измеренное датчиком 2 тока, преобразуется в цифровую форму. Поскольку данный сигнал все еще может содержать помехи, то перед дифференцированием он обрабатывается в микропроцессорном комплекте 4 по одному из алгоритмов цифровой фильтрации [5] или сглаживается [6] С этой целью возможна также установка RC-фильтра на выходе датчика 2 тока (не показан). Полученный при дифференцировании и отфильтрованный сигнал умножается на коэффициент, прямо пропорциональный моменту инерции двигателя и определяемый из его паспортных данных. Вычисленное значение динамического тока вычитается из текущего значения тока, и таким образом определяется статический ток двигателя 6, соответствующий текущему весу колонны на крюке.
Управляющее воздействие в подпрограмме регулирования осевой нагрузки на долото вычисляется по следующему алгоритму (см. фиг.4). Значения сигнала задания скорости Uзс, амплитуды управляющего воздействия Uзим, счетчика Nдс дискретных интервалов времени и счетчика I точек, в которых вводится коррекция в ход переходных процессов, при этом количество точек регулирования равно N, инициализируются при включении микропроцессорного комплекта 4 следующим образом: Uзс=0, Uзим=0, I=0, Nдс=Tим/ΔT, где Tим время линейного нарастания сигнала задания на скорость на величину вычисленной данной подпраграммой амплитуды управляющего воздействия; ΔT дискретность во времени, с которой работает микропроцессорный комплект.
При соответствии счетчика Nдс дискретных интервалов времени и счетчика I точек коррекции инициализированным значениям и наличии ошибки по нагрузке на долото, превышающей заданную в подпрограмме допустимую ошибку δдоп, величина этой ошибки в момент времени k запоминается микропроцессорным комплектом 4 как δнач. Если же ошибка не превышает заданную, то величина сигнала задания на скорость не изменяется. Умножение δнач на текущее значение коэффициента из массива B (в зависимости от точки коррекции) определяет величину ошибки по нагрузке на долото δп, которая бы имела место в данный момент при предсказанном и желательном ходе переходного процесса. Массив коэффициентов B(I) определяется при предварительном имитационном моделировании электромеханической системы (порядок определения коэффициентов приведен после описания работы устройства для регулирования электропривода). Далее находится отклонение реальной ошибки δ от предсказанной dп (имеющее место вследствие действия на электромеханическую систему регулятор подачи долота талевая система колонна бурильных труб возмущений и возможной неточности в определении коэффициентов) и с помощью предварительно определенного коэффициента M (алгоритм определения коэффициента, см. ниже) вычисляется величина требуемого для компенсации возмущений амплитуды корректирующего управляющего воздействия Uзим = M*(δ - δп). После этого значение циклического счетчика I точек коррекции увеличивается и ограничивается в случае достижения заданного количества точек коррекции N, определяющих длительность переходного процесса, приравнивается 1.
Но значение сигнала задания на скорость (до установки задания нагрузки на задатчике 1 нагрузки на долото равное нулю), которое формирует данная подпрограмма, увеличивается на Uзим лишь за время Tим, в каждый дискретный интервал времени работы микропроцессорного комплекта 4 возрастая на U
Каждый раз после изменения Uзс значение счетчика Nдс дискретных интервалов времени увеличивается на 1. Коррекция амплитуды управляющего воздействия Uзим не будет производиться до тех пор, пока Nдс не достигнет значения Tим/ΔT что означает истечение интервала времени Tим. Если же при этом пройдены и все точки коррекции (I=1), то проверяется, стала ли ошибка по нагрузке на долото меньше допустимой. Если же рассогласование все еще имеет место, то данная ошибка считается следствием нового возмущения и процесс регулирования продолжается таким образом до достижения условия δ < δдоп. Регулирование осевой нагрузки практически астатическое. Допустимая ошибка при моделировании принималась на уровне 10Е-5.
Как уже отмечалось ранее, используемые в подпрограмме регулирования осевой нагрузки на долото для вычисления управляющего воздействия по нагрузке на долото коэффициенты B(I) и M могут быть определены при проектировании путем предварительного моделирования электромеханической системы.
Предполагается, что долото находится в соприкосновении с породой произвольно заданной твердости. Задаемся определенным значением скорости, которое сохраняется неизменным в процессе определения коэффициентов. Выбирая соответствующее задание на вес, искусственно уравновешиваем электромеханическую систему.
На электромеханическую систему, оптимизированную относительно скорости одним из известных способов [4] по каналу нагрузки подается возмущающий сигнал произвольной амплитуды. Снимается кривая переходного процесса ошибки по нагрузке на долото. Ошибка, по которой предполагается строить регулирование, фиксируется через 1 с после приложения импульса. Вычисляется коэффициент Ab, равный отношению конечного рассогласования к величине этой ошибки.
Аналогично на электромеханическую систему подается сигнал Uзс задания скорости в виде линейно нарастающего в течение Tим единичного управляющего импульса (т. е. Uзс увеличивается на 1) и фиксируется рассогласование по завершении процесса. Высчитывается коэффициент Ay, равный отношению 1 к величине конечного рассогласования.
Если в момент времени k будет обнаружена ошибка, то через интервал дискретности, с которым работает устройство для регулирования, по ее величине с помощью суммарного коэффициента пропорциональности M=Ay•Ab может быть рассчитано управляющее воздействие, требуемое для компенсации приложенного возмущения. Поскольку темп изменения скорости ограничен из технологических соображений, управляющее воздействие линейно нарастает в течение интервала времени Tим.
Если при этом кривая переходного процесса по нагрузке на долото является гладкой (отсутствует колебательность), то значение Tим фиксируется и используется при регулировании. В противном случае увеличиваем время нарастания управляющего воздействия Tим на 0,5 с (первоначально Tим устанавливается равным 0,5 с) и снова оцениваем полученную кривую.
Таким образом, в ответ на возмущающее воздействие устройство для регулирования числа оборотов и момента электропривода воздействует на двигатель 6, а следовательно, в конечном счете, и на долото вычисленным управляющим воздействием. В результате приложения к электромеханической системе управляющего и возмущающего воздействий противоположной направленности электромеханическая система должна прийти к равновесию. Но в связи с некоторой задержкой управляющего импульса отклонение все же имеет место, причем величина отклонения в каждый момент времени k + i пропорциональна величине ошибки δ [k] в момент времени k. Ошибка в каждый момент времени k + i (где i=1,N) сравнивается с d [k] и вычисляется соответствующий коэффициент пропорциональности B(i). Данный переходной процесс принимается в качестве эталонного и по нему строится регулирование нагрузки на долото по алгоритму, приведенному на фиг. 4. Коэффициенты B(i) (i=1,N) позволяют предсказать ход развития переходного процесса при произвольном возмущении в электромеханической системе по первоначально обнаруженному рассогласованию (ошибке по нагрузке на долото).
При моделировании коэффициенты B(I) и M определяются при каждом увеличении длины бурильных труб, например, на 1000 м (в пределах глубины разбуриваемой скважины).
Моделирование переходных процессов в системе регулятор подачи долота - талевая система колонна бурильных труб с таким устройством для регулирования числа оборотов и момента электропривода (использовался П-закон регулирования числа оборотов и ПИ-закон регулирования тока двигателя) показывает, что система управления практически полностью контролирует переходный процесс в механической части. При этом качество электромагнитных переходных процессов вполне приемлемое, т.к. амплитуда тока не превышает трети допустимого значения, а интегральный ток даже меньше, чем в известном устройстве, а это значит, что регулирование происходит при меньшем потребляемом токе. Хотя число оборотов двигателя в предлагаемом устройстве изменяется с гораздо большим темпом, чем в известном устройстве, ускорение не превышает технологически заданных ограничений. Вместе с тем динамическая ошибка по нагрузке на долото уменьшается в несколько раз, и процесс практически завершается через 4 с вместо 130 в исходной системе. Причем нагрузка вследствие изменения твердости менялась с 1 до 4 тс. Моделировался аналогично и случай возникающего скачком изменения нагрузки до 20 тс, при этом относительные динамические показатели двух систем остаются практически теми же, а амплитуда тока не превышает половины допустимой, хотя подобное изменение твердости как по амплитуде, так и по темпу не характерно для данной системы. Моделировался наиболее тяжелый случай. При более плавном изменении твердости эффективность применения предлагаемого устройства значительно возрастает.
Аналогично динамической нагрузке на долото снижаются и динамические нагрузки во всех узлах колонны бурильных труб, благодаря чему возрастает не только срок службы самого долота, но и бурильных труб, т.к. снижаются нагрузки на соединяющие их муфты. Все это, как отмечено выше, увеличивает производительность буровых работ.
Устройство для регулирования числа оборотов и момента электропривода регулятора подачи долота может содержать датчик веса (на фиг.1 не показан), присоединенный к входу микропроцессорного комплекта 4 (см. фиг. 1). Вместе с тем, поскольку вес колонны более точно соответствует натяжению ходовой ветви талевого каната, чем натяжению неподвижной ветви, где установлен датчик веса, то последний используется для дополнительного визуального контроля за ходом изменения нагрузки на долото.
Литература.
1. Моцохейн Б.И. Электротехнические комплексы и системы буровых установок. М. Недра, с.166.
2. Авторское свидетельство СССР N 145294, БИ N 3, 1989 г.
3. Боборыкин А.В. Липовецкий Г.П. и др. Однокристальные микроЭВМ. 1994, с. 107.
4. Азаров Б.Я. Ильяшенко Л.А. Ильяшенко Н.Л. и др. Применение микропроцессоров в автоматизированном электроприводе. М. Моск. энерг. ин-т, 1989. 94 с. с.66.
5. Первозванский А.А. Курс теории автоматического управления: Учеб. пособ. М. Наука. Гл. ред. физ.-мат. лит. 1986, 616 с. с.130.
6. Башарин А.В. Постников Ю.В. Примеры расчета автоматизированного электропривода на ЭВМ: Учеб. пособие для вузов, 3-е изд. Л. Энергоатомиздат. Ленинград. отд-ние, 1990. 512 с. с. 250.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОПРИВОДА РЕГУЛЯТОРА ПОДАЧИ ДОЛОТА | 1996 |
|
RU2108456C1 |
| АКТИВНЫЙ РЕГУЛЯТОР ПОДАЧИ ДОЛОТА | 2018 |
|
RU2681160C1 |
| Регулятор подачи долота | 1986 |
|
SU1416676A1 |
| Способ регулирования осевой нагрузки на долото в процессе бурения и устройство для его осуществления | 1987 |
|
SU1476115A1 |
| РЕГУЛЯТОР ПОДАЧИ БУРОВОГО ИНСТРУМЕНТА | 1991 |
|
RU2013531C1 |
| Устройство для регулирования скорости электродвигателя постоянного тока | 1972 |
|
SU439052A1 |
| Устройство управления электроприводом регулятора подачи долота | 1987 |
|
SU1452944A1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗАБОЙНОГО ГИДРАВЛИЧЕСКОГО ДВИГАТЕЛЯ ПРИ БУРЕНИИ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2029859C1 |
| Регулятор подачи бурового инструмента | 1987 |
|
SU1439232A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |



Использование: в устройствах для регулирования электроприводов буровых установок. Сущность: устройство для регулирования числа оборотов и момента электропривода, содержащее задатчик нагрузки на долото, датчик тока и датчик скорости, снабжено микропроцессорным комплектом, выполняющим функции регулирования осевой нагрузки на долото, числа оборотов и тока двигателя; входы этого комплекта соединены с задатчиком нагрузки на долото, датчиком тока и датчиком скорости, к выходу которого подключается преобразователь, питающий двигатель, при этом микропроцессорный комплект выполнен с возможностью реализации алгоритма регулирования осевой нагрузки на долото в регуляторе подачи долота, алгоритма определения статического тока двигателя и алгоритма вычисления управляющего воздействия в подпрограмме регулирования осевой нагрузки на долото. Для дополнительного контроля осевой нагрузки на долото это устройство может быть снабжено датчиком веса, соединенным с входом микропроцессорного комплекта, при этом достигается улучшение качества регулирования электропривода, например регулятора подачи долота, за счет формирования динамических характеристик электропривода, обеспечивающих оптимальные условия обработки породоразрушающего инструмента вследствие снижения динамической ошибки регулирования и увеличения быстродействия системы, а также повышение за счет этого производительности буровых работ. 1 з.п.ф-лы, 4 ил.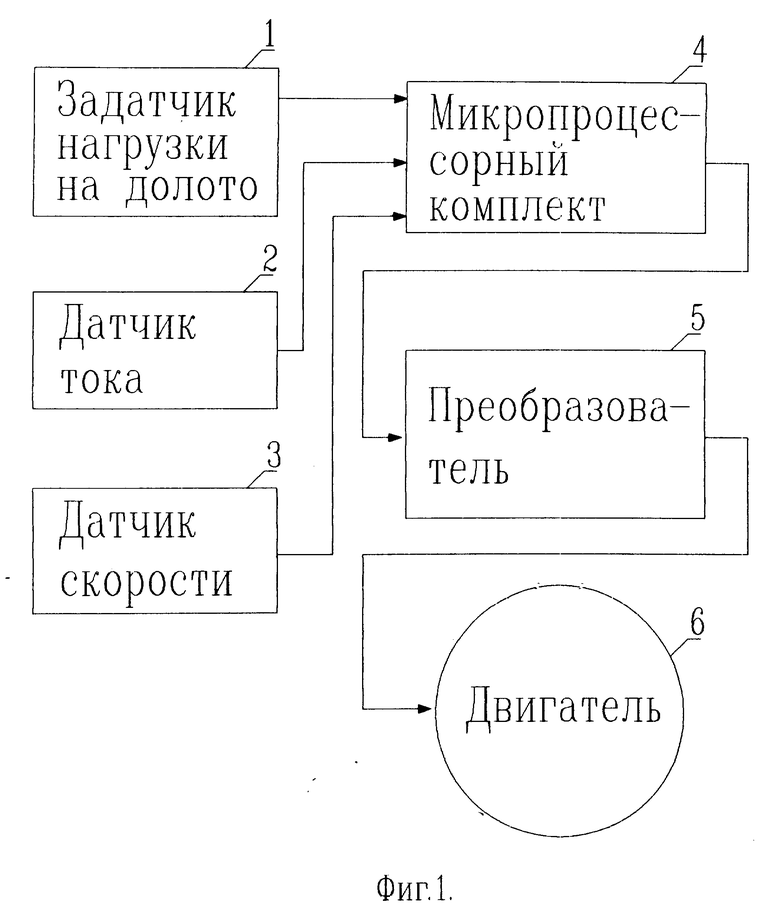
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Моцохейн Б.И | |||
| Электротехнические комплексы и системы буровых установок | |||
| - М.: Недра, с | |||
| Рельсовый башмак | 1921 |
|
SU166A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство управления электроприводом регулятора подачи долота | 1987 |
|
SU1452944A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
