Изобретение относится к отрасли сельскохозяйственного машиностроения в частности может быть использовано как техническое средство для сбора плодов цитрусовых, преимущественно апельсинов.
Наиболее близкой к изобретению по технической сущности и достигаемому результату является мащина для сбора плодов, преимущественно апельсинов, содержащая установленную на имеющем возможность перемещения в трех взаимно перпендикулярных направлениях кронщтейне по меньщей мере одну механическую руку с центробежными пальцами, которые выкручивают плодоножку и систему управления. Механическая рука отрывает только единичный плод с дерева, она находится на консоле, открывается и закрывается с помощью пульта управления. От пульта управления приводится в действие также кронщтейн механической рукой. Механическая рука закреплена щарнирно и может поворачиваться в любом направлении, имитируя человеческую руку. С помощью тросов на треугольной рулевой колонке кронщтейн может подниматься и опускаться до заданного места перед съемкой плода. Пульт управления с кнопочной системой и рычагами удобно расположен перед оператором, с помощью которого машина может передвигаться взад и вперед. После отрыва плод поступает в металлическую трубку и транспортируется дальше в контейнеры 1.
Недостатками известной машины является низкая производительность вследствие утомляемости оператора при длительном сборе плодов, а также то, что обрыв скручиванием плодоножки не обеспечивает ее номинальную заданную величину, что приводит к повреждениям плодов.
Цель изобретения - повышение производительности труда путем автоматизации процесса сбора плодов и уменьшения их повреждений.
Поставленная цель достигается те.м, что в машине для сбора плодов, преимущественно апельсинов, содержащей установленную на имеющем возможность перемещения в трех взаимно перпендикулярных направлениях кронштейне по меньщей мере одну механическую руку с пальцами и систему управления, каждая механическая рука установлена на кронштейне при помощи щарнирно соединенного с ним основания, имеющего направляющую и стойку, причем на основании закреплен пневмоцилиндр, на штоке которого в направляющей основания установлена Г-образная тяга с прорезью, а на стойке основания размещены режущий рабочий орган и пальцы, кинематически связанные с Г-образной тягой, при этом кронштейн соединен с основанием при помощи дополнительного пневмоцилиндра, а внутри каждой механической руки установлены осветители плодов с оптическими приемниками, соединенными системой управления с пневмоцилиндрами. Кроме того пальцы выполнены в виде гофрированного щланга и замкнуты с торцов концевыми пробками, при этом внутри каждого пальца установлен трос, один конец которого жестко соединен с концевой пробкой, а другой - с Г-образной тягой.
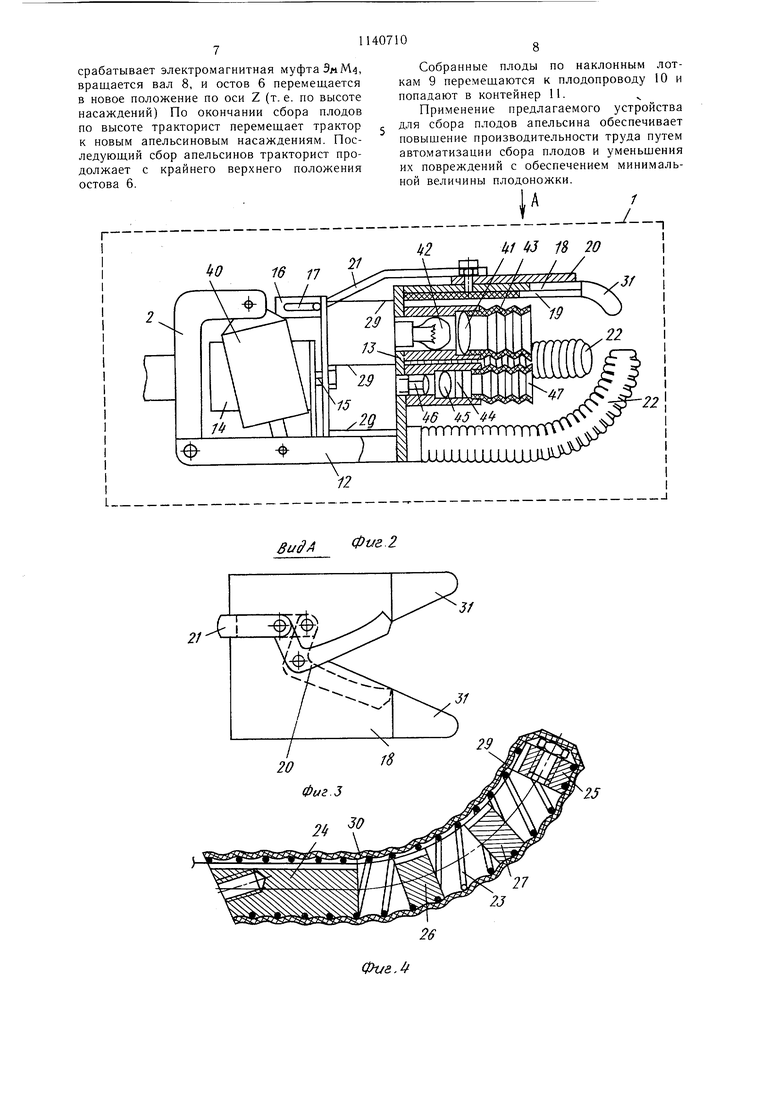
На фиг. 1 изображена машина для сбора плодов апельсинов, обший вид; на фиг. 2 - механическая рука машины для сбора плодов апельсинов; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - палец механической
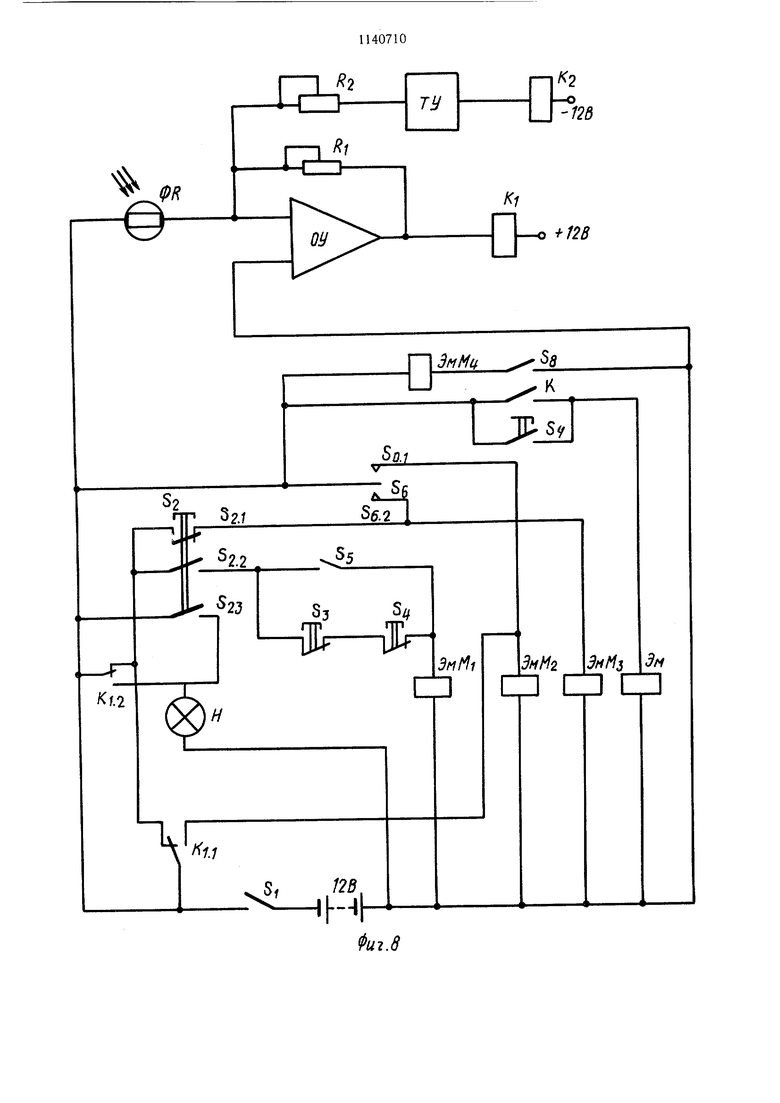
руки, исходное положение; на фиг. 5 - то же, выравненное положение; на фиг. 6 - разрез Б-Б на фиг. 5; на фиг. 7 - схема блокировки пневмоцилиндров; на фиг. 8 - электрическая схема управления механической руки; на фиг. 9 - механическая рука
в поиске плода; на фиг. 10 - то же, при подходе к плоду; на фиг. 11 - захват плода; на фиг. 12 - срез плода; на фиг. 13 - возврашение механической руки в горизонтальное положение совместно с плодом; на фиг. 14 - транспортиров плода; на фиг. 15 - сброс плода; на фиг. 16 - возврат механической руки в исходное положение; на фиг. 17 - укороченный палец механической руки в выравненном положении; продольный разрез; на фиг. 18 -
то же, вид сверху; на фиг. 19 - то же, исходное положение; на фиг. 20 - разрез В-В на фиг. 18; на фиг. 21 - размещение осветителя и его оптического приемника в механической руке.
Машина для сбора плодов апельсинов содержит механические руки 1, закрепленные на имеющих возможность перемещения в трех взаимно перпендикулярных плоскостях кронштейнах 2, которые установлены на телескопических рукоятках 3. Привод
телескопических рукояток 3 осуществляется от валов 4. Телескопические рукоятки 3 осуществляют перемещение механической руки 1 вдоль оси Y. Посредством ходовых валиков 5 руки 1 перемещаются вдоль оси X. Ходовые валики 5 установлены на остове 6, который смонтирован на стойке 7. Внутри стойки 7 установлен ходовой вал 8, посредством которого остову 6 задается перемещение вдоль оси Z. На остове 6 закреплены лотки 9, центральные части которых
плодопроводом 10 сообщаются с контейнером 11, размещенным на шасси трактора. Каждая механическая рука 1 установлена на кронщтейне 2 посредством шарнирно связанного с ним основания 12, имеющего направляющую и стойку 13. На
основании 12 жестко закреплен пневмоцилиндр 14, на щтоке 15 которого в направляющей основания 12 установлена Г-образная тяга 16 с прорезью 17 в верхней части.
На стойке 13 основания 12 размещены режущий рабочий орган в виде неподвижного ножа 18 с V-образной прорезью, на тыльной стороне которого прикреплен эластичный материал 19 для исключения повреждения плода, и установленного на неподвижном ноже 18 подвижного ножа 20, который посредством тяги 21 связан с прорезью 17 Г-образной тяги 16.
На стойке 13 основания 12 также размещены пальцы 22, выполненные из витой цилиндрической пружины 23 с постоянным щагом. По торцам пружины 23 вмонтированы пробка 24 и концевая пробка 25, между которыми с равномерным щагом внутри пружины 23 размеены промежуточные пробки 26 и 27. Пробки 24-27 на наружной поверхности имеют резьбу с шагом, равным щагу пужины 23, и в них выполнены пазы 28. В пазах размещен трос 29, один конец которого жестко соединен с концевой пробкой 25. Тросы 29 свободными своими концами жестко присоединены к Г-образной тяге 16. Пальцы 22 с наружной стороны обтянуты эластичным гофрированным материалом 30. Механическая рука 1 содержит четыре пальца 22 и два укороченных пальца 31. Конструкция укороченных пальцев аналогична конструкции пальцев 22. Укороченный палец содержит пробку 32 и концевую пробку 33. Палец также имеет витую цилиндрическую пружину 34 с постоянным щагом. Пробки 32 и 33 на наружной поверхности имеют резьбу с щагом, равным щагу пружины 34, и пазы 35 и 36. В них размещен трос 29, один конец которого жестко соединен с концевой пробкой 33 посредством винта 37. Укороченные пальцы 31 с наружной стороны обтянуты эластичным гофрированным материалом 38 имеющим треугольную грднь 39, которая является продолжением V-образной прорези неподвижного ножа 18. Согнутость пальцев 22 в исходном положении исключает попадание веток внутрь механической руки 1.
Кроме того, кронщтейн 2 соединен с основанием 12 посредством дополнительного пневмоцилиндра 40, а на стойке 13 основания 12 внутри руки 1 установлен осветитель, состоящий из линзы 41 и лампы 42. Осветитель снабжен гофрированным наконечником 43. На стойке 13 также установлен оптический приемник, состоящий из светофильтра 44, линзы 45 и фоторезистора 46. Оптический приемник снабжен гофрированным наконечником 47.
Пневмоцилиндры 14 и 40 сблокированы между собой пневмопроводом 48, который имеет отводящий патрубок 49. В пневмопроводе 48 вмонтирован клапан 50, а в патрубке 49 - клапан 51. Порщни 52 и 53 пневмоцилиндров 14 и 40 взаимодействуют с пружинами 54 и 55. На фиг. 9-16 позицией 56 показана плодоножка, а позицией 57 - плод апельсина. Питание электрического управления механической рукой 1 осуществляется от аккумулятора 12В. Электрическая система управления (фиг. 8) содержит фоторезистор (ФК) 46, операционный усилитель (ОУ), регулятор Rj, реле KI со своими контактами Ki,i и Ki,2 регулятор Ra транзисторный усилитель (ТУ), реле Viz, общий включатель Si осветитель Н в виде лампы (42), кнопку блокировки Sj со своими контактами: Sg, постоянно замкнутый, 52,2 2,1 постоянно разомкнутые, концевые постоянно замкнутые контакты Sj, 5-5 , включатель ручного управления 35 механической руки 1 по направлению оси X, переключатель Sg со своими
5 контактами Sse,i , 5б,г ручного управления механической руки 1 по направлению оси Y, концевую кнопку ST, включатель 38 ручного управления механической рукой 1 по направлению оси Z. электромагнитную муфту Эм Ml для передачи вращения ходовому валику 5, электромагнитную муфту 7Эк Иг для выдвижения телескопической рукоятки 3 электромагнитную муфтуЭ М Для задвижения телескопической рукоятки 3. электромагнитную муфту ЭиМ4 для включения при5вода ходового вала 8, электромагнит Эл для подачи сжатого воздуха к пневмоцилиндру 14.
На остове 6 показаны три механические руки 1. Каждая механическая рука 1 име0ет раздельно электрическую схему управления.
Мащина для сбора плодов апельсинов работает следующим образом.
Трактор въезжает между рядами цитрусовых и останавливается. Остов 6 находится в крайнем нижнем положении, а телескопические рукоятки 3 находятся в задвижном положении, при котором контакт St,i разомкнут, а контакты Зг,г и 62,5 замкнуты (кнопка блокировки Si находится под воздействием кронщтейна 2). Тракторист включает включатель Sj, при этом включается лампа 42 и электромагнитная муфта ЭиМ, одновременно с этим ток поступает к фоторезистору 46. Включение лампы 42 вызывает направление потока света через линзу 41 и гофрированный наконечник 43 на цитрусовые насаждения. Включением электромагнитной муфты ЭпМ приходит во вращение ходовой валик 5, и механическая рука 1 перемещается в направлении оси X. Осветитель обеспечивает диаметр светового пучка, равный 15 см. При попадании плода 57 в освещенную зону часть луча отражается от него и через светофильтр 44 (светофильтр 44 пропускает лучи только желтого цвета, т. е. соответствует спелым плодам) и линзу 45 попадает на фоторезистор 46. От этого фоторезистор 46 пропускает сигна.лы операционному усилителю. Коэффициент усиления операционного усилителя (регулируется регулятором RI). После усиления сигнала срабатывает реле KiH переключаются контакты Кхл. и Kj.z, при этом отключается электромагнитная муфта ЭиМ1, прекращается вращение ходового валика 5 и перемещение механической руки в направлении оси X. Чувствительность фоторезистора 46 и коэффициент усиления операционного усилителя ОУ подобраны таким образом, что механическая рука 1 останавливается против плода 57. Одновременно с выключением электромагнитной муфты Эл Мг включается электромагнитная муфта ЭиМг, что обеспечивает выдвижение телескопической рукоятки 3 и приближение к плоду 57 механической руки 1. Выдвижением механической руки 1 кнопка блокировки 5г освобождается одновременно с приближением к плоду 57, интенсивность отр-аженных от него лучей, попадающих на фоторезистор R 46, увеличивается. Импульсы, исходящие от фоторезисторов 46 проходят через регулятор R и, усиливаясь в транзисторном усилителе, попадают на реле Кг По мере приближеНИН механической руки 1 к плоду 57 наступает момент, при котором срабатывает реле Кг (расстояние при котором происходит срабатывание реле Ка, регулируется посредством регулятора R и его оптимальное значение колеблется от 5-10 см). Когда реле Кг срабатывает, включается контакт Kj.j, что вызывает включение электромагнита Эл, который обеспечивает подачу сжатого воздуха к пневмоцилиндру 14. Сжатый воздух перемещает порщень 52, а заодно щток 15 и Г-образную тягу 16. При этом тросы 29 расслабляются и пальцы 22 и 31 из исходного положения под воздействием пружин 23 выравниваются. Так как электромагнитная муфта Эк Ма не отключена, раскрытая механическая рука 1 продолжает выдвигаться к плоду 57 и V-образная прорезь неподвижного ножа 18 обеспечивает западание в него плодоножки 56 и плода 57. Одновременно с этим порщень 52 пневмоцилиндра 14 открывает доступ сжатого воздуха 50 и сжатый воздух по пневмопроводу 48 попадает в пневмоцилиндр 40, клапан 51 при этом закрыт. Сжатый воздух вызывает выдвижение порщня 53 и одновременно с этим поворот основания 12 вокруг щарнира в вертикальной плоскости. Одновременно с продвижением механической руки 1 и наклоном основания 12 плод 57 с одной стороны прижимается к гофрированным наконечникам 43 и 47, а со стороны плодоножки 56 плотно прилегает через эластичный материал 19 к неподвижному ножу 18 (фиг. 11). Прилегание плода 57 к гофрированным наконечникам 43 и 47 вызывает отенение фоторезистора 46, и прекращается подача сигналов к реле Ki и К, в результате чего переключаются их контакты Kj.i Ki,b Переключение контакта Ki,i отключает электромагнит Эм, что вызывает прекращение подачи сжатого воздуха к пневмоцилиндру 14, и под воздействием пружины 54 порщень 52, щток 15 и Г-образная тяга 16 перемещаются в исходное положение, что вызывает натяжение тросов 29, и пальцы 22 и 31, выгибась, плотно обхватывают плод 57. Один конец тяги 21 при этом перемещается в прорези 17 и Г-образная тяга, не доходя до своего исходного положения, воздействует на тягу 21, которая воздействует на нож 20, и происходит срез плодоножки 56. Так как плод 57 прижат пальцами 22 и 31 и наклоном основания 12 к неподвижному ножу 18 через эластичный материал 19, то происходит срез минимальной величины плодоножки 56. В исходном положении Г-образная тяга 16 воздействует на клапан 51, который открывается, и сжатый воздух из патрубка 49 выбрасывается в атмосферу, при этом порщень 53 под воздействием пружины 55 возвращается в исходное положение и механическая рука 1 принимает горизонтальное положение (фиг. 13). Переключение контакта Ki-j вызывает отключение электромагнитной муфты Эм Mj, соответственно, отключение выдвижения механической руки 1 и включение электромагнитной муфты ЭлМа, которое приводит к за движению телескопической рукоятки 3 (фиг. 14). По мере задвижения механическая рука 1 воздействует на концевую кнопку Sr , которая включает электромагнит Эк , обеспечивающий подачу сжатого воздуха к пневмоцилиндру 14. Под воздействием сжатого воздуха поршень 52, преодолевая сопротивление пружины 54, перемещается, тросы 29 расслабляются, пальцы 22 и 31 выравниваются. При попадании сжатого воздуха через пневмопривод 48 в пневмоцилиндр 40 происходит наклон основания 12 и освобожденный плод 57 попадает в лоток 9. Дальнейшее задвижение телескопической рукоятки 3 и механической руки 1 освобождает концевую кнопку Sr . электромагнит Эн отключается, прекращается подача сжатого воздуха к пневмоцилиндрам 14 и 40. Порщни 52 и 53 возвращаются в исходное положение, и механическая рука 1 возвращается также в исходное положение, при котором контакт Sg.i разомкнут, а контакты Зг.г и замкнуты, и перемещается в направлении оси X. Цикл работы механической руки 1 повторяется. Когда механические руки 1 достигнут крайнего положения вдоль оси X, тракторист включает включатель 5g , при этом
срабатывает электромагнитная муфта ЭлМ, вращается вал 8, и остов б перемещается в новое положение по оси Z (т. е. по высоте насаждений) По окончании сбора плодов по высоте тракторист перемещает трактор к новым апельсиновым насаждениям. Последующий сбор апельсинов тракторист продолжает с крайнего верхнего положения остова 6.
Собранные плоды по наклонным лоткам 9 перемещаются к плодопроводу 10 и попадают в контейнер 11.
Применение предлагаемого устройства для сбора плодов апельсина обеспечивает повышение производительности труда путем автоматизации сбора плодов и уменьщения их повреждений с обеспечением минимальной величины плодоножки.

| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для сбора плодов | 1989 |
|
SU1702923A2 |
| УСТРОЙСТВО ДЛЯ СБОРА ЯГОД, ПРЕИМУЩЕСТВЕННО МОРОШКИ | 1995 |
|
RU2092013C1 |
| Устройство для сбора плодов | 1980 |
|
SU882471A1 |
| Плодосъемник | 2015 |
|
RU2612364C2 |
| Плодосъемник И.Г.Мухина | 1985 |
|
SU1445614A1 |
| Приспособление для съема плодов с деревьев | 1981 |
|
SU948329A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ПНЕВМАТИЧЕСКИХ УДАРНЫХ ИНСТРУМЕНТОВ | 1991 |
|
RU2051022C1 |
| УСТРОЙСТВО ДЛЯ РУЧНОГО СБОРА ПЛОДОВ С ДЕРЕВЬЕВ | 2001 |
|
RU2182417C1 |
| Устройство для срезания плодоножки И.Г.Мухина | 1985 |
|
SU1301346A1 |
| Устройство для ручного сбора плодов с деревьев | 1990 |
|
SU1819529A1 |



1. МАШИНА ДЛЯ СБОРА ПЛОДОВ, преимущественно апельсинов содержащая установленную на имеющем возможность перемещения в трех взаимно перпендикулярных направлениях кронштейне по меньщей мере одну механическую руку с пальцами и систему управления, отличающаяся тем, что, с целью повыщения производительности труда путем автоматизации процесса сбора плодов и уменьшения их повреждений, каждая механическая рука установлена на кронштейне при помощи шарннрно соединенного с ним основания, имеющего направляющую и стойку, причем на основании закреплен пневмоцилиндр, на щтоке которого в направляющей основания установлена Г-образная тяга с прорезью, а на стойке основания размещены режущий рабочий орган и пальцы, кинематически связанные с Г-образной тягой, при этом кронщтейн соединен с основанием при помощи дополнительного пневмоцилиндра, а внутри каждой механической руки установлены осветители плодов с оптическими приемниками, соединенными системой управления с пневмоцилиндрами. 2. Машина по п. 1, отличающаяся тем, что пальцы выполнены в виде гофрированного шланга и замкнуты с торцов концевыми пробками, при этом внутри каждого паль(Л ца установлен трос, один конец которого жестко соединен с концевой пробкой, а другой - с Г-образной тягой. о vj
Ш
.Фиг.З Itf «J /1
27
23
Фиг. 18 20 / /
фиг 5
///X///////
ТЖ/k
f--л р dHtd
itb
1
v
кжж
///V //X///
«
.
С&г/г./
Фт.в
Фиг.lit
фиг 15
3S J jj
Фиг. 17
В
JJ
29
Фиг, 20
22
31
V
| l.The citrus Indust, 1970, v | |||
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
