Изобретение относится к сельскохозяйственному машиностроению, может быть использовано как техническое средство для сбора плодов цитрусовых, преимущественно апельсинов и лимонов, и является усовершенствованием машины по авт.св. №1140710.
-.,. - - Г - . . - . -, -. -
т Цель изобретения - повышение производительности машины.
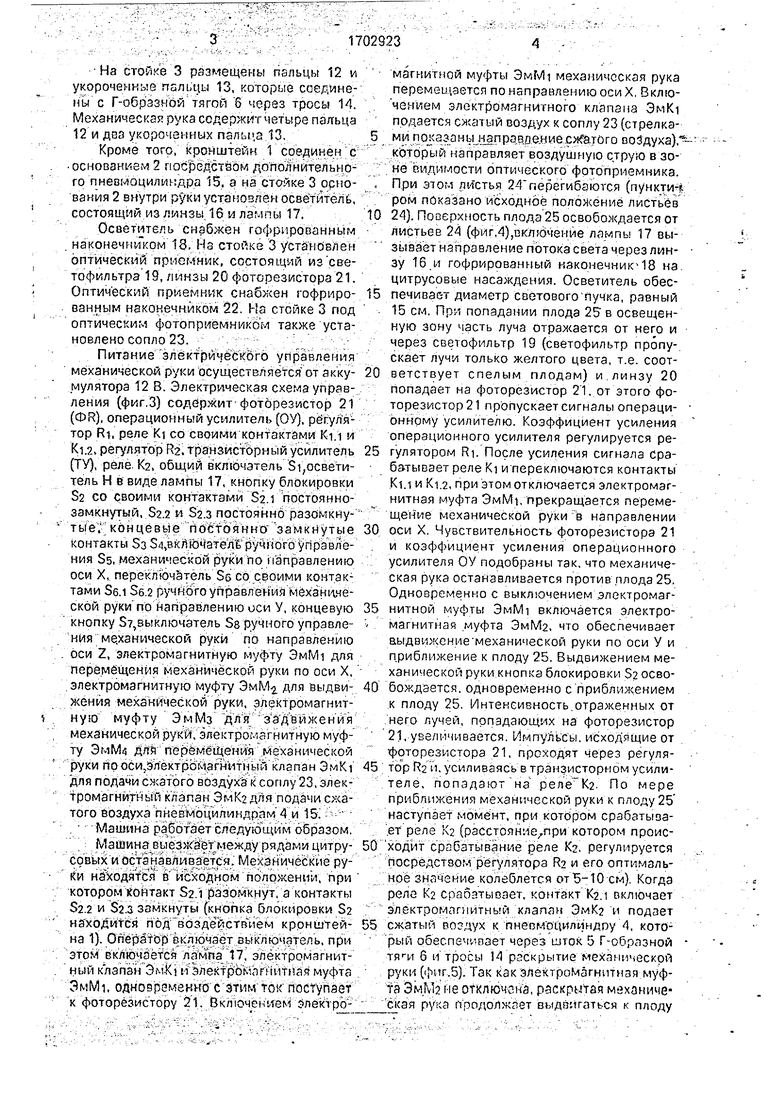
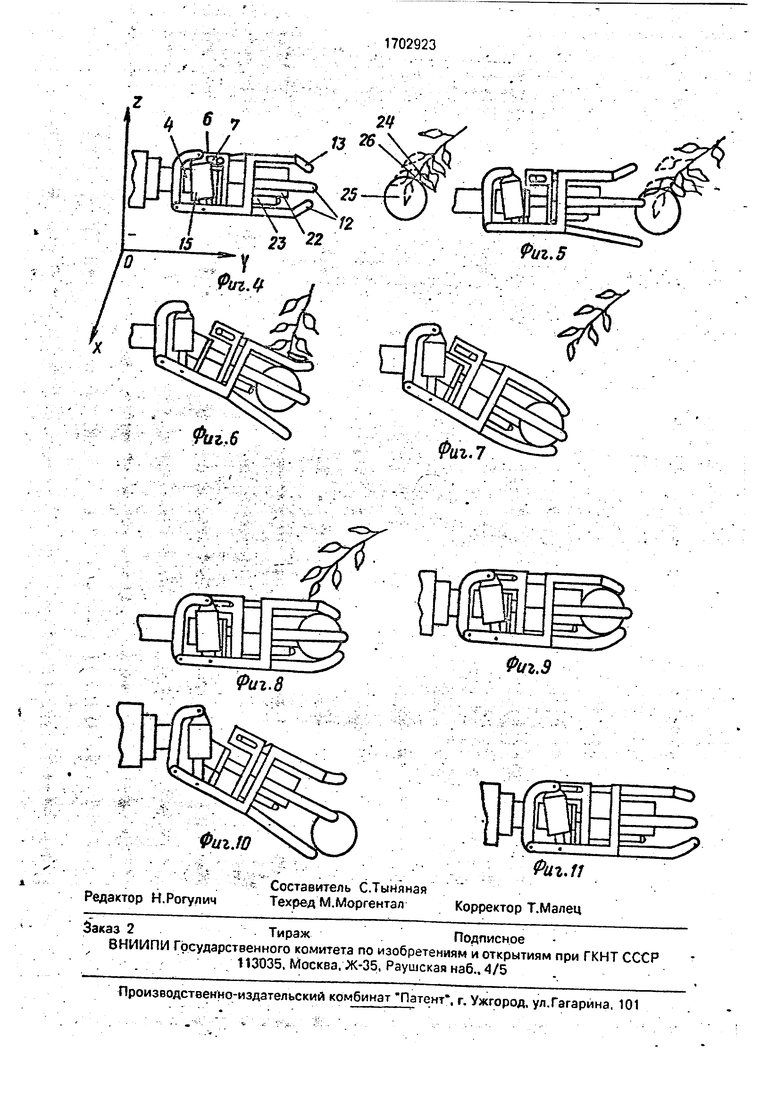
На фиг.1 показана механическая рука машины для сбора плодов цитрусовых; на фиг.2-вид А на фиг. 1: на фиг.З - электрическая схема управления механической руки; на фиг,4 - механическая рука в поиске плода; на фиг.5 - то же. при подходе к плоду; на фиг.6 - захват плода; на фиг.7 - срез плода; на фиг.8 - возвращение механической руки 8 горизонтальное положение совместно с
плодом: на фиг.9 - транспортировка плода; на фиг.Ю-сброс плода; на фиг.11 -возврат механической руки в исходное положение. Механическая рука установлена на кронштейне 1 посредством шарнирно связанного с ним основания 2, имеющего направляющую и стойку 3. На основании 2 жестко закреплен пневмоцилйндр 4. на штоке 5 которого в направляющей основания 2 установлена Г-образная тяга 6 с прорезью 7 в верхней части. На стойке 3 основания 2 размещены режущий рабочий орган - неподвижный нож 8, нз тыльной стороне которого прикреплен эластичный материал 9 для исключения повреждения Плода, и установленный на неподвижном ноже 8 подвижный нож 10, который посредством тяги 11 связан с прорезью 7 Г-образ- ной тяги 6.
VJ
О
кэ ю
N5 GO
ю
На стойке 3 размещены пальцы 12 и укороченные пальцы 13, которые соединены с Г-об разной тягой б через тросы 14. Механическая рука содержит четыре пальца 12 и дзэ укороченных пальца 13.
Кроме того, кронштейн 1 соединен с основанием 2 пос рёдстёбм дополнительного пневмоциликдра 15. а на стойке 3 основания 2 внутри руки установлен осветитель, состоящий из линзы 16 и лампы 17.
Осветитель снабжён гофрированным наконечником 18, На стойке 3 устано влен оптический приемник, состоящий из светофильтра 19, линзы 20 фоторезистора 21. Оптический приемник снабжен гофрированным наконечником 22. На стойке 3 под оптическим фотоприёмником также установлено сопло 23.
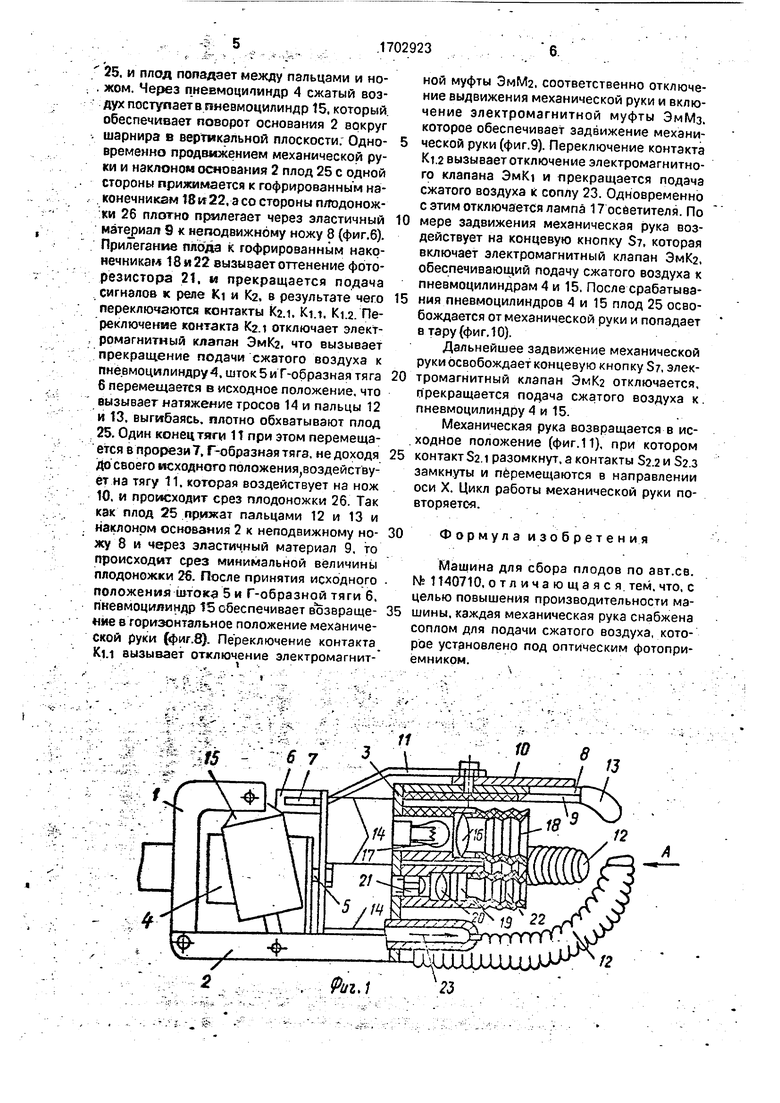
Питание; злёктрйчёск6го управления механической руки осуществляется от аккумулятора 12 В. Электрическая схема управления (фиг.З) содержит- фотбрезистор 21 (OR), операционный усилитель (ОУ), регулятор R}, реле KI со своими контактами KV.i и Ki.2, регулятор R2, транзисторный усилитель (ТУ), реле. К2, общий вктбчэтель В освети- тель Н в виде лампы 17, кнопку блокировки $2 со своими контактами $2.1 постЬянно- ззмкнутый, $2.2 и S2.3 постоянно разомкнуv тйе концёвые постоянно замкнутые контакты 5з З вкАюЦатё/Гь ручного у правления Ss, механической руки по направлению оси X, переключатель SG с 6 своими контактами $6.1 Se.2 ручного управления механической руки по направлению оси У, концевую кнопку 5,выключзтель SB ручного управления механической руки по направлению . оси Z, электромагнитную муфту ЭмМ1 для перемещения механической руки по оси X, электромагнитную муфту ЭмМ. для выдвижения механической руки, электромагнит- . ную муфту ЭмМз дл за д вйжения механической руки/электромагнитную муфту ЭмМз Для1 перемещен механической
руки rip оси;э л ёктрй магж-1тйый клапан ЭмКГ для подачи сжатого воздуха к соплу 23, зл ек : тромагнйтный клапан ЭмК2 для подачи сжатого воздуха пневйоцилиндрям 15i --;
: . Машина работает следующим образом. : 1ашина. между рядами цитрусовых; и останавливаетея Механические руки нйХодйт Ш в исходной положении, при котором Яойтакт S2.1 разомкнут, а контакты $2.2 и $2Л замкнуты (кнопка блокировки $2 на хЬдйТся п6д воздейств йем кронштейна 1). .ц л юч а ет...вь й /1 м5Тбл ь. при . этой вк1люмает ся ламЪа 17, электромагнит- ный клапан ЗмК и электр ЬКйКййтная муфта ЭмМт, однов р5мекнд с 5Т11м;ток г10СГупйет
; к фоторезистору 21. Включением Электромагнитной муфты ЭмМт механическая рука перемещается по направлению оси X, Включением электромагнитного клапана ЭмК1 подается сжатый воздух к соплу 23 (стрелками по азаны н правдениесж атйго воздуха),
кбторый направляет воздушную струю в зо- не кидимости оптического фртоприемника. При этом листья 24 перегибаются (пунктир ром показано исходное положение листьев
24). Пооерхность плода 25 освобождается от листьев 24 (фиг,4),сключенйе лампы 17 вызывает направление потока света через линзу 16 и гофрированный нэконечникч18 на. цитрусовые насаждения. Осветитель обеспечивает диаметр светового пучка, равный 15 см, При попадании плода 25 в освещенную зону часть луча отражается от него и через светофильтр 19 (светофильтр пропускает лучи только желтого цвета, т.е. соответствует спелым плодам) и.линзу 20 попадает на фоторезистор 21, от этого фоторезистор 21 пропускает сигналы операциЪнн ому усилителю. Коэффициент усиления операционного усилителя регулируется регулятором RL После усиления сигнала срабатывает реле Ki и переключаются контакты Kin и Ki.2, при этом отключается электромагнитная муфта ЭмМ1, прекращается перемещение механической руки в направлении
оси X. Чувствительность фоторезистора 21 и коэффициент усиления операционного усилителя ОУ подобраны так. что механическая рука останавливается против плода 25. Одновременно с выключением .электромагнитной муфты ЭмМт включается электромагнитная муфта ЭмМ2, что обеспечивает аыдвижение механической руки по оси У и приближение к плоду 25. Выдвижением механической руки кнопка блокировки $2 освобождается. одновременно с приближением
к плоду 25. Интенсивность.отраженных от
него лучей, попадающих на фоторезистор
21, увеличивается. Ймпуль с ы. исходящие от
фоторезистора 21, проходят через регулятор . усиливаясь в транзисторном усилителе, попадают на реле «2. По мере
приближения механической руки к плоду 25
наступает момент, при котором срабатыва .ет реле 2 (рзсстояние при котором проис ходит срабатывание реле К2. регулируется посредством регулятора R и его оптимальное значение колеблется отБ-10 см). Когда реле К2 срабатывает, контакт К2.1 включает электромагнитный клапан ЭмК2 и подает
сжатый воздух к пнеомоцилиндоу 4, кото рый обеспеч /.вает через шток 5 Г-образной тяги 6 и тросы 14 рдскрытие механи«(
руки (фиг,5). Так как злектроМзгннтнзя муфта Зм.Мг не отключена, раскрытая механиче ская рука гУродолжйет выдвигаться к плоду
25. и плод попадает между пальцами и но- . жом. Через пневмоципиндр 4 сжатый воздух поступает в пневмоцилиндр 15. который, обеспечивает поворот основания 2 вокруг шарнира в вертикальной плоскости. Одновременно продвижением механической руки и наклоном основания 2 плод 25 с одной стороны прижимается к гофрированным на- . конечникзм 18и22,асо стороны плодонож- :ки 26 плотно прилегает через эластичный материал 9 к неподвижному ножу 8 (фиг.6). Прилегание плода к гофрированным наконечникам 18 и 22 вызывает оттенение фоторезистора 21, и прекращается подача сигналов к реле Ki и К2, в результате чего переключаются контакты К2.1. Kt.i. К 1.2. Переключение контакта Кз.1 отключает электромагнитный клапан ЭмК2, что вызывает прекращение подачи сжатого воздуха к пнёвмоцилиндру4. шкж5иТ-образная тяга б перемещается в исходное положение, что вызывает натяжение тросов 14 и пальцы 12 и 13. выгибаясь, плотно обхватывают плод 25. Один конец тяги 1Т при этом перемещается в прорези 7, Г-образнаятягз. не доходя до своего исходного положения,воздейству- ёт на тягу 11. которая воздействует на нож 10, и происходит срез плодоножки 26. Так как плод 25 прижат пальцами 12 и 13 и наклоном основания 2 к неподвижному ножу 8 и через эластичный материал 9. то происходит срез минимальной величины плодоножки 26. После принятия исходного положения штока 5 и Г-образной тяги 6. пкевмоцияиндр 15 обеспечивает в озвраще- «ие в горизонтальное положение механической руки (фиг.8). Переключение контакта Ki.i вызывает отключение электромагнит... fi -.У ---- I -
ной муфты ЭмМ2, соответственно отключение выдвижения механической руки и включение электромагнитной муфты ЭмМз. которое обеспечивает задвижение механической руки (фиг.9). Переключение контакта Ki.2 вызывает отключение электромагнитного клапана ЭмК1 и прекращается подача сжатого воздуха к соплу 23. Одновременно с этим отключается лампа 17 осветителя. По
мере задвижения механическая рука воздействует на концевую кнопку $, которая включает электромагнитный клапан ЭмК2, обеспечивающий подачу сжатого воздуха к пневмоцилиндрам 4 и 15. После срабатывания пневмоцилиндров 4 и 15 плод 25 освобождается от механической руки и попадает в тару (фиг. 10).
Дальнейшее задвижение механической руки освобождает концевую кнопку S, электромагнитный клапан ЭмК2 отключается, прекращается подача сжатого воздуха к. пневмоцилиндру4 и 15.
Механическая рука возвращается в ис- . ходное положение (фиг.11), при котором
контакт $2.1 разомкнут, а контакты S2.2 и $2.3 замкнуты и перемещаются в направлении оси X. Цикл работы механической руки повторяется.
30
Формула изобретения
Машина для сбора плодов по авт.св. № 1140710, отличающаяся, тем. что. с целью повышения производительности ма- шины, каждая механическая рука снабжена соплом для подачи сжатого воздуха, которое установлено под оптическим фотоприёмником.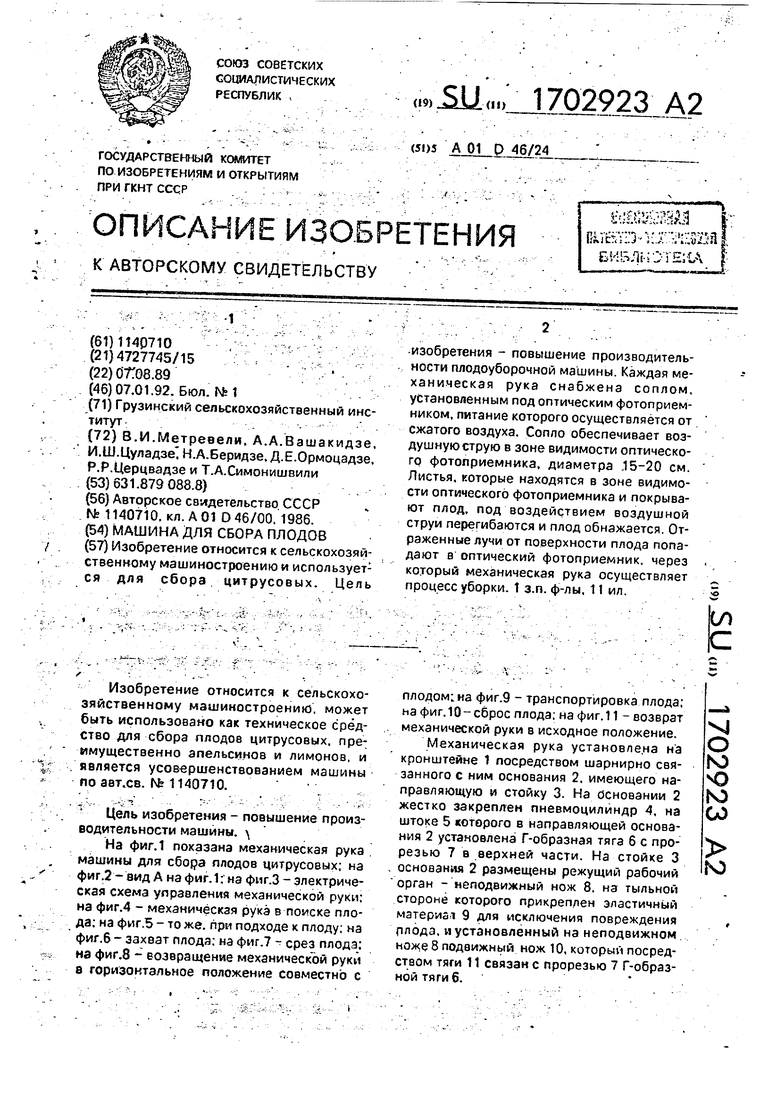
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для сбора плодов | 1983 |
|
SU1140710A1 |
| Устройство для пневматического транспортирования сыпучего материала в виде пробок | 1983 |
|
SU1180334A1 |
| УСТРОЙСТВО ГЕНЕРИРОВАНИЯ И РАССЕИВАНИЯ СПЕЦИАЛЬНЫХ МАТЕРИАЛОВ | 2002 |
|
RU2235573C2 |
| Устройство для отделки поверхности строительных изделий | 1972 |
|
SU440258A1 |
| Станок для полуавтоматической намотки электрических катушек с сердечником | 1957 |
|
SU111158A1 |
| Измеритель масляного тумана | 1972 |
|
SU444093A1 |
| АППАРАТ ДЛЯ АВТОМАТИЧЕСКОГО ПРОИЗВОДСТВА ФОТОГРАФИЧЕСКИХ СНИМКОВ | 1928 |
|
SU12730A1 |
| Устройство для раскроя картона | 1987 |
|
SU1638001A1 |
| Обучающее устройство | 1985 |
|
SU1278921A1 |
| СПОСОБ ОБРАБОТКИ ВОДЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2466940C2 |
Изобретение относится к сельскохозяйственному машиностроению и использует1 ся для сбора, цитрусовых. Цель -изобретения - повышение производительности плодоуборочной машины. Каждая механическая рука снабжена соплом, установленным под оптическим фотоприемником, питание которого осуществляется от сжатого воздуха. Сопло обеспечивает воздушную струю в зоне видимости оптического фотоприемника, диаметра ,15-20 см. Листья, которые находятся в зоне видимости оптического фотоприемника и покрывают плод, под воздействием воздушной струи перегибаются и плод обнажается. Отраженные лучи от поверхности плода попадают в оптический фотоприемник, через который механическая рука осуществляет процесс уборки. 1 з.п. ф-лы. 11 ил.
10
8
13
12
Ј. 0 сбГГчЙ
,-# : iii Ji 4|:B$ : ;i:; f-vi :
:. т
о
со «о
ГО OJ
g3.
ГП
о
П
5
04
Vr
Риг.8
Фиг.Ю
. - Составитель С.Тыняная Редактор Н.РогуличТехред М. Морге нта л
Заказ 2
Ьг.11
Корректор Т.Малец
рнммп1/1 гТираж Подписное
- 8НИИПИ Гясуда в го «оммтвта по имбретениям и открытиям при ГКНТ СССР
Фиг.Э
Ьг.11
Корректор Т.Малец
| Авторское свидетельство | |||
| Машина для сбора плодов | 1983 |
|
SU1140710A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
