U
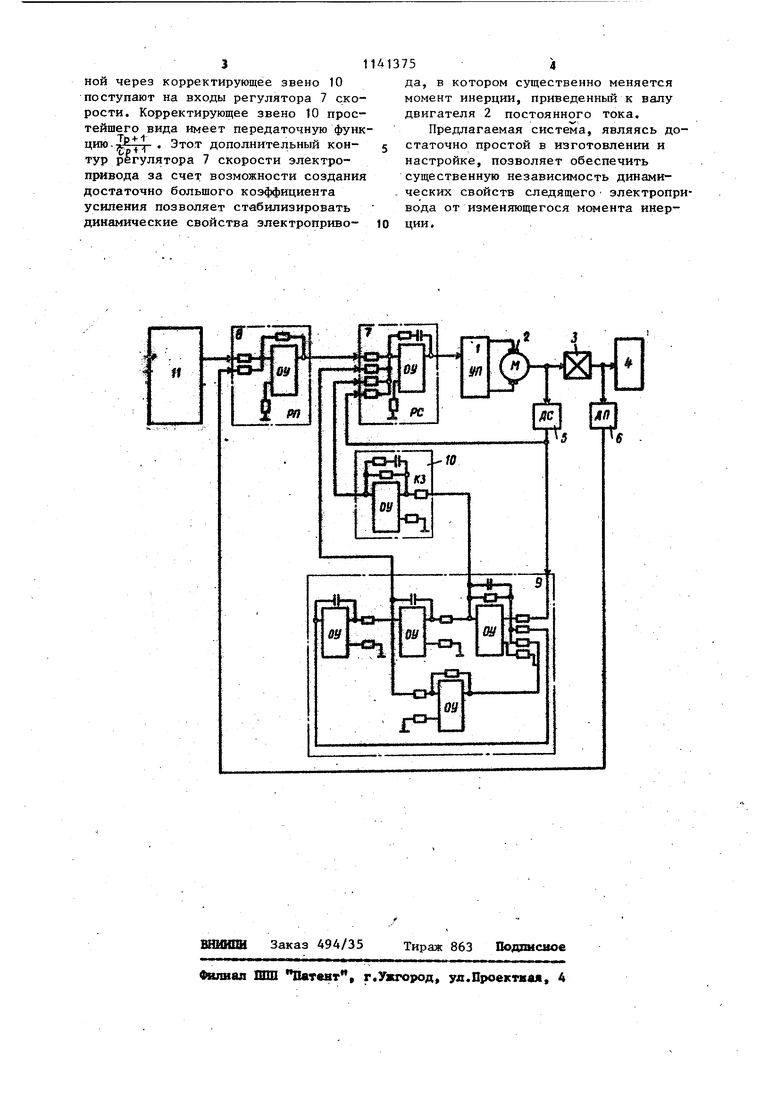
:п г1 Изобретение относится к области автоматизированного электропривода и может быть использовано в приводах опрокидывателей, роботов-манипуляторов, подъемно-качающихся столов, кузнечио-прессовых машин, опорно-поворотньвг механизмов экскаваторов и других устройств с изменяемым приведенным моментом инерции. Известен следящий электропривод с переменным моментом инерции, выполненный по системе управляемый преобразователь - двигатель с трекконтурной системой подчинеьлого регулирования. Электропривод содержит регуляторы тока, положения и самонастраивающийся регулятор скорости, Представляющий собой последовательТо соединенные регулятор скорости и блок перемножения, второй вход которого соединен с выходом функционального построителя, вход которого явля ется входом подстройки. Электропривод также содержит датчики тока, ско рости и положения, причем вход подстройки самонастраивающегося регулятора скорости подключен к выходу наблюдателя параметра /д, который содержит два блока перемножения, три сумматора и два интегратора fll. Недостатком этого электропривода является его сложность. Наиболее близким к изобретению яв ляется устройство, содержащее последовательно соединенные задатчик вход ного сигнала, регулятор положения, регулятор скорости, усилитель, двигатель постоянного тока, редуктор, объект управления, а также датчики положения и скорости, выходы которых соединены соо-Гветственно с вторыми входами регулятора положения и регулятора скорости, а входы - соответственно с выходом и входом редуктора 2 L Недостатком известного устройств также является сложность реализации Целью изобретения является упрощение электропривода -при сохранении независимостг-1 его дина1)шческих свойств от изменения момента инерции . Поставленная цель достигается тем что в следящий электропривод с пере менным моментом инерции, содержащий последовательно соединенные задатчи входного сигнала, регулятор положения, регулятор скорости, усил1 тель. 5 двигатель постоянного тока, редуктор, объект управления, а также датчики положени}/ и скорости, выходы которых соединены соответственно с вторьми входами регулятора положения и регулятора скорости, а входы - соответственно с выходом и входом редуктора, дополнительно введены корректирующие звено и блок оценки производдатчика скорости, а выходы по первой производной непосредственно, а по второй производной через корректирующее звено соединены соответственно с третыш к четвертьм входами регулятора скорости. На чертеже показана структурная схема следящего электропривода с переменным моментом инерции. Устройство содержит усилитель 1, двигатель 2 постоянного тока, редуктор 3, объект 4 управления, датчик 5 скорости, датчик 6 положения,регулятор 7 скорости, регулятор 8 положения, блок 9 оценки производных, корректирующее звено 10, задатчик 11 входного сигнала. Устройство работает следукмцим об15азом. Входной сигнал с задатчика 11 поступает на регулятор 8 положения, на выходе которого формируется сигнал ошибки регулирования, поступакщий на вход регулятора 7 скорости. Регулятор 7 скорости, усилитель 1, двигатель 2 постоянного тока, датчик 5 скорости образуют стандартный контур стабилизации скорости. Сигнал угловой скорости с выхода датчика 5 скорости поступает на вход блока 9 оценки производньгх, передаточная функция которого по первой и второй производным может быть представлена в виде Р , Р т р2+т7р+Т где Р символ оператора дифференцирования j Т, Tj - постоянные коэффициенты, выбираемые из условия УСТОЙЧИВОСТИ и достаточного быстродействия фильтра. В свою очередь сигналы с выходов блока 9 по первой производной непосредственно, а по второй производ31
ной через корректирующее звено 10 поступают на входы регулятора 7 скорости. Корректирующее звено 10 простейшего вида имеет передаточную функцию . Этот дополнительный контур регулятора 7 скорости электроП1 1вода за счет возможности создания достаточно большого коэффициента усиления позволяет стабилизировать динамические свойства электроприво1413754
да, в котором существенно меняется момент инерции, приведенный к валу двигателя 2 постоянного тока.
Предлагаемая система, являясь до5 статочно простой в изготовлении и настройке, позволяет обеспечить существенную независимость динами- ческих свойств следящего электропривода от изменяющегося момента инерции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
| Самонастраивающаяся следящая система с бесконтактным двигателем постоянного тока | 1984 |
|
SU1259212A1 |
| Самонастраивающаяся робастная система управления | 2023 |
|
RU2819264C1 |
| Самонастраивающийся электропривод робота | 1988 |
|
SU1618643A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399080C1 |
| Следящий электропривод с переменным моментом инерции | 1981 |
|
SU1004964A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С ПЕРЕМЕННЫМ МОМЕНТОМ ИНЕРЦИИ, содержащий последовательно соединённые задатчик входного сигнала, регулятор положения, регулятор скорости, усилитель, двигатель постоянного тока, редуктор, объект управления а также датчики положения и скорости,выходы которых соединены соответственно с вторыми входами регулятора положения и регулятора скорости, а входы соответственно с выходом и входом ре гулятора, отличающийся тем, что, с целью упрощения при сохранении независимости его динамических свойств от изменения моментов инерции, в него дополнительно введены корректирующее звено и блок оценки производных, вход которЪго соединен с выходом датчика скорости, а выходы по первой производной непо3 средственно, а по второй производной iepes корректирующее звено соединены соответственно с третьим и четвертым входами регулятора скорости.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Межвузовский сборник научных трудов | |||
| Новосибирск, 1977, с | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Следящий электропривод с переменным моментом инерции | 1981 |
|
SU1004964A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
