Изобретение относится к области автоматического управления и предназначено для использования в системах управления электрогидроприводами с нелинейностью и нестационарностью параметров в условиях действия внешних возмущений. Изобретение может быть использовано в станках, роботах, летательных аппаратах и испытательных стендах.
Решаемой задачей является создание электрогидравлической системы, обладающей высокими показателями точности, быстродействия и надежности без использования дополнительного датчика давления.
Известна [1] реализация электрогидравлической системы без датчика давления. Для компенсации влияния на статические и динамические характеристики внешней нагрузки, температуры рабочей жидкости и изменения начального перепада давления предложена самонастраивающаяся система с настройкой коэффициента усиления основного контура, работающая следующим образом.
При отсутствии внешней нагрузки и при номинальных значениях температуры рабочей жидкости, перепада давления ошибка между моделью и объектом равна нулю и привод работает обычным образом. Если, например, из-за возникшей нагрузки скорость выходного звена уменьшится, то появится рассогласование, которое умножается на ошибку основного контура регулирования и поступает на вход электрогидравлического усилителя гидропривода. Золотник усилителя совершает дополнительное (по отношению к перемещению, которое он имел при обычном режиме работы привода) перемещение. Это перемещение будет происходить до тех пор, пока величина рассогласования по перемещению выходного вала не станет равной нулю.
Недостатком известной системы управления электрогидроприводом является снижение запасов устойчивости в случае, когда объект управления представляет собой слободемпфированную динамическую систему и имеются существенные нелинейности в основном контуре регулирования.
Известен электрогидравлический привод [2], использующий самонастраивающуюся систему с эталонной моделью и комбинированной настройкой, т.е. как координатной, так и параметрической. Для повышения эффективности настройки каналы координатной и параметрической настройки разделены фильтрами высокой и низкой частот в соответствии с частотными свойствами ошибки по перемещению между моделью и приводом. Входным сигналом модели является сигнал на выходе предварительных усилительных устройств. Соответствующим образом выбранные фильтры низкой и высокой частот усиливают или ослабляют влияние на не увязку параметрических или сигнальных возмущений и таким образом осуществляют коррекцию динамических свойств привода.
Недостатком известного устройства является невозможность компенсации "сквозных" нелинейностей предварительных усилительных устройств, кроме того, при больших параметрических рассогласованиях требуется значительное усиление в контуре обратной связи по ошибке, что может привести к нарушению работоспособности системы управления в условиях всегда имеющих место помех.
Наиболее близким к предлагаемому является самонастраивающаяся следящая система [3] (прототип), содержащая последовательно соединенные задатчик, регулятор, усилитель, двигатель, датчик частоты вращения, идентификатор состояния, блок масштабных коэффициентов и нелинейный усилитель с ограничением, выход которого соединен со вторым входом регулятора, третий вход регулятора связан со вторым выходом датчика частоты вращения, второй выход двигателя через датчик тока возбуждения связан с блоком регулирования тока возбуждения, выход которого связан со вторым входом двигателя, выход задатчика соединен со вторым входом идентификатора состояния, со вторым входом блока регулирования тока возбуждения и через эталонную модель - со вторым входом блока масштабных коэффициентов, второй выход датчика тока возбуждения соединен со вторым входом нелинейного усилителя, выполненного с регулируемым ограничением.
Недостатками известной самонастраивающейся системы являются: снижение надежности и усложнение конструкции привода из-за установки дополнительного датчика тока (для электрогидравлической следящей системы функции, выполняемые датчиком тока в электроприводе, выполняет датчик динамического давления); сигнал, считываемый с датчика тока, содержит не только полезную составляющую, пропорциональную ускорению выходного вала, но и вредную, определяемую внешними возмущениями и трением в двигателе, что снижает запас устойчивости системы.
Сущность изобретения заключается в том, что в известную самонастраивающуюся систему, содержащую последовательно соединенные задатчик, регулятор, усилитель, гидродвигатель, датчик положения, идентификатор состояния и блок масштабных коэффициентов, выход датчика положения соединен со вторым входом регулятора, выход задатчика подключен ко второму входу идентификатора состояния, а также эталонную модель, дополнительно введены последовательно соединенные суммирующее устройство и релейный элемент, выход которого соединен с третьими входами регулятора и идентификатора состояния и на второй вход эталонной модели, второй вход релейного элемента соединен с выходом блока масштабных коэффициентов, первый вход суммирующего устройства подключен к выходу датчика положения, второй - к первому выходу эталонной модели, выход регулятора соединен с первым входом эталонной модели, чей второй выход подключен ко второму входу блока масштабных коэффициентов, при этом эталонная модель состоит из последовательно соединенных апериодического звена и интегратора, выход последнего подключен к первому выходу эталонной модели, чей второй выход соединен с выходом апериодического звена, первый вход эталонной модели подключен к входу апериодического звена, ее второй вход - к второму входу интегратора.
Основное отличие от прототипа предлагаемой системы заключается в выборе модели объекта на основе его усредненных линеаризованных характеристик в виде последовательно соединенных апериодического звена и интегратора, описывающих динамику усилителя по расходу рабочей жидкости (апериодическим звеном) и динамику выходного вала (интегратором), и построении в соответствии с ней предлагаемой системы, которая включает в себя модель в виде апериодического звена и интегратора, выход апериодического звена, отражающий желаемую динамику расхода гидродвигателя, сравнивается с производной перемещения выходного вала двигателя, оцениваемой идентификатором состояния и пропорциональной реальному расходу, результат этого сравнения и сигнал разности между действительным перемещением выходного вала гидродвигателя и выхода модели с разными весовыми коэффициентами подаются на релейный элемент, реализующий знаковую функцию, выход которого с целью коррекции подается на входы регулятора, идентификатора состояния и интегратора модели.
Коррекция интегратора, содержащегося в модели, осуществляется организацией отрицательной обратной связи через суммирующее устройство и релейный элемент. Это обеспечивает сброс выходного напряжения интегратора, ликвидируя тем самым дрейф величины оценки положения выходного вала гидродвигателя, вызванного действием электрических шумов и неидеальностью аппаратной реализации интегратора. Влияние вновь введенной обратной связи на эталонную динамику модели компенсируется подачей выходного сигнала релейного элемента по цепи регулятор - апериодическое звено модели на вход интегратора; при этом из-за разных знаков контуров через некоторое время, определяемое постоянной времени апериодического звена модели* будет наблюдаться компенсация сигнала обратной связи. Совокупность вновь вводимых связей и элементов позволяет достичь таких технических результатов, как повышение точности, быстродействия и надежности электрогидравлической системы без применения дополнительного датчика - датчика давления.
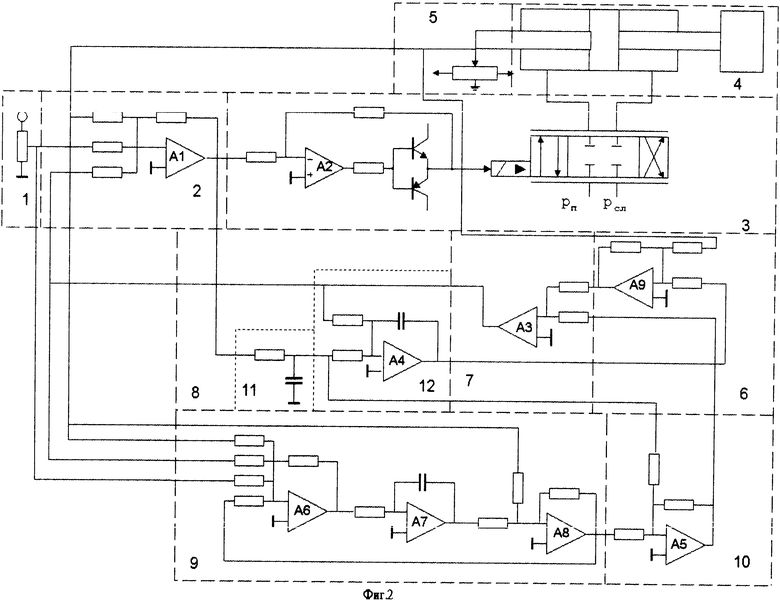
На фиг. 1 приведена функциональная схема электрогидравлической следящей системы; на фиг. 2 - вариант реализации системы.
Электрогидравлическая следящая система содержит последовательно соединенные задатчик (8) 1, регулятор (Р) 2, усилитель (У) 3, гидродвигатель (Д) 4, датчик положения (ДП) 5, суммирующее устройство (ОУ) 6 и релейный элемент (РЭ) 7, выход которого подключен к третьему входу регулятора 2, а также эталонную модель (ЭМ) 8 и идентификатор состояния (ИС) 9, первый и второй входы которого подключены к выходу датчика положения 5 и выходу задатчика 1 соответственно, выход эталонной модели 8 соединен со вторым входом суммирующего устройства 6, блок масштабных коэффициентов (БМК) 10, первый вход которого подключен к выходу идентификатора состояния 9, выход датчика положения 5 подключен ко второму входу регулятора 2, чей выход соединен с первым входом эталонной модели 8, выход блока масштабных коэффициентов 10 соединен с вторым входом релейного элемента 7, чей выход подключен к второму входу эталонной модели 8 и к третьему входу идентификатора состояния 9, второй выход эталонной модели 8 соединен с вторым входом блока масштабных коэффициентов 10, при этом эталонная модель 8 состоит из последовательно соединенных апериодического звена (АЗ) 11 и интегратора (И) 12, выход последнего подключен к первому выходу эталонной модели 8, чей второй вход соединен с выходом апериодического звена 11, первый вход эталонной модели 8 подключен к входу апериодического звена 11, ее второй вход - к второму входу интегратора 12.
Электрогидравлическая система работает следующим образом.
3адатчик 1 вырабатывает командный сигнал, который поступает на первый вход регулятора 2, выполняющего, если необходимо, функции предварительного усилителя, затем через усилитель 3 на гидродвигатель 4, выходной вал которого кинематически соединен с движком датчика положения 5. Сигнал с датчика положения 5 сравнивается с сигналом задатчика 1 на регуляторе 2 с целью организации отрицательной обратной связи по регулируемой переменной электрогидравлической системы. Кроме того, сигнал с датчика положения 5 алгебраически суммируется на блоке масштабных коэффициентов 6 с выходным сигналом интегратора 12 эталонной модели 8, который обладает требуемой динамикой и формой переходной характеристики. Полученная таким образом ошибка привода и модели по положению выходного вала вместе с сигналом разности оценки идентификатора состояния 9 и второй переменной состояния эталонной модели 8, снимаемой с выхода апериодического звена 11 (эта разность пропорциональна рассогласованию между объектом и моделью по расходу рабочей жидкости гидродвигателя), поступают на входы релейного элемента 7, который реализует операцию суммирования входных сигналов с требуемыми для устойчивости процесса самонастройки весовыми коэффициентами и одновременно знаковую функцию. Далее полученный сигнал поступает на второй вход регулятора 2, замыкая контур коррекции привода по сигналу вектора ошибки управления. Идентификатор состояния 9 представляет собой упрощенный (редуцированный) вариант наблюдателя и является моделью первого порядка, полученной по линейному стационарному приближению объекта управления. Согласование оценки дополнительной переменной, вырабатываемой линейной частью идентификатора 9, с ее реальным значением в нелинейном нестационарном объекте управления осуществляется с помощью корректирующего сигнала на выходе релейного элемента 7, содержащего информацию о динамическом рассогласовании объекта и модели по перемещению и скорости выходного вала гидродвигателя. Для получения этого сигнала в модель 8 введен интегратор 12, позволяющий получить эталонную динамику гидродвигателя не только по положению, но и по скорости (расходу рабочей жидкости). Однако использование в модели 8 интегратора 12 ухудшает помехоустойчивость системы. Для коррекции работы интегратора 12 на его второй вход подан сигнал с выхода релейного элемента 7. Это обеспечивает сброс выходного значения интегратора 12, ликвидируя таким образом уход выходного напряжения, который имеет место вследствие действия на систему помех. Для того, чтобы введенная отрицательная обратная связь не нарушала функционального назначения модели 8 "первый ее выход подсоединен к выходу регулятора 2 так, что влияние обратной связи компенсируется за счет алгебраического суммирования одинаковых по величине, но разных по знаку сигналов. Время полной компенсации влияния обратной связи определяется постоянной времени апериодического звена 11. В реальных электрогидравлических системах эта постоянная времени на порядок меньше времени регулирования основного контура. Введение обратной связи возможно благодаря высокому быстродействию контуров коррекции идентификатора 9 и объекта управления.
Электрогидравлическая следящая система может быть реализована следующим образом. Усилитель и гидродвигатель имеют известные реализации, датчик положения может быть выполнен, например, потенциометрическим, задатчик может быть осуществлен с помощью регулируемого потенциометра, подключенного к постоянному питающему напряжению, а остальные блоки могут быть реализованы на операционных усилителях с резистивно-емкостными связями, как показано на фиг. 32. Регулятор 2 представляет собой пропорциональное звено, реализованное на операционном усилителе A1 и выполняет функции масштабирования и, если необходимо, предварительного усилителя. Идентификатор состояния 9 выполнен на трех операционных усилителях A2, A7, A8, осуществляющих метод прямого интегрирования дифференциального уравнения объекта по последовательной схеме. Апериодическое звено 11 модели 8 выполнено на пассивной RC-цепочке, а интегратор 12 - на операционном усилителе A4 с емкостной обратной связью.
Данная система за счет исключения дополнительного датчика, модификации модели 8 и введения быстродействующих контуров коррекции идентификатора состояния 9 и интегратора модели 8 позволяет повысить точность, быстродействие и надежность привода в условиях нелинейности и нестационарности его свойств, а также действия помех.
Литература.
1. Самонастраивающийся электрогидравлический привод дроссельного регулирования с эталонной моделью. В. И. Разинцев, С.В. Волков. Новое в проектировании и эксплуатации автоматических приводов и систем гидроавтоматики. - Л.: ЛДНТП, 1984, с. 63 - 66.
2. Самонастраивающийся электрогидравлический привод объемного регулирования. С.Т Ходько, В. Ф. Суслов. Новое в проектировании и эксплуатации автоматических приводов и систем гидроавтоматики. Л.: ЛДНТП, 1987) с. 31 - 35.
3. Авторское свидетельство СССР 928300, кл. G 05 B 13/02, 1982, Б.И. 18 - 82.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ТРАНСПОРТНЫМ ЗАПАЗДЫВАНИЕМ | 1994 |
|
RU2079868C1 |
| ВРЕМЯИМПУЛЬСНЫЙ КВАДРАТИЧНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2149449C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1984 |
|
SU1285953A1 |
| ПРЕОБРАЗОВАТЕЛЬ КОД - АНАЛОГ | 1999 |
|
RU2159506C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
Изобретение относится к области автоматического управления и предназначено для использования в системах управления электрогидроприводами. Изобретение может быть использовано в станках, роботах, летательных аппаратах и испытательных стендах. Решаемой задачей является создание электрогидравлической системы, обладающей высокими показателями точности, быстродействия и надежности без использования дополнительного датчика. Сущность изобретения заключается в выборе модели объекта в виде последовательно соединенных апериодического звена и интегратора, описывающих динамику электрогидравлического усилителя по расходу рабочей жидкости (апериодическим звеном) и динамику выходного вала (интегратором), и построении в соответствии с ней предлагаемой системы, которая включает в себя модель в виде апериодического звена и интегратора, выход апериодического звена, отражающий желаемую динамику расхода рабочей жидкости гидродвигателя, сравнивается с производной перемещения выходного вала гидродвигателя, оцениваемой идентификатором состояния и пропорциональной реальному расходу, результат этого сравнения и сигнал разности между действенным перемещением выходного вала гидродвигателя и выхода модели с разными весовыми коэффициентами подаются на релейный элемент, реализующий знаковую функцию, выход которого с целью коррекции подается на выходы регулятора, идентификатора состояния и интегратора модели. 2 ил.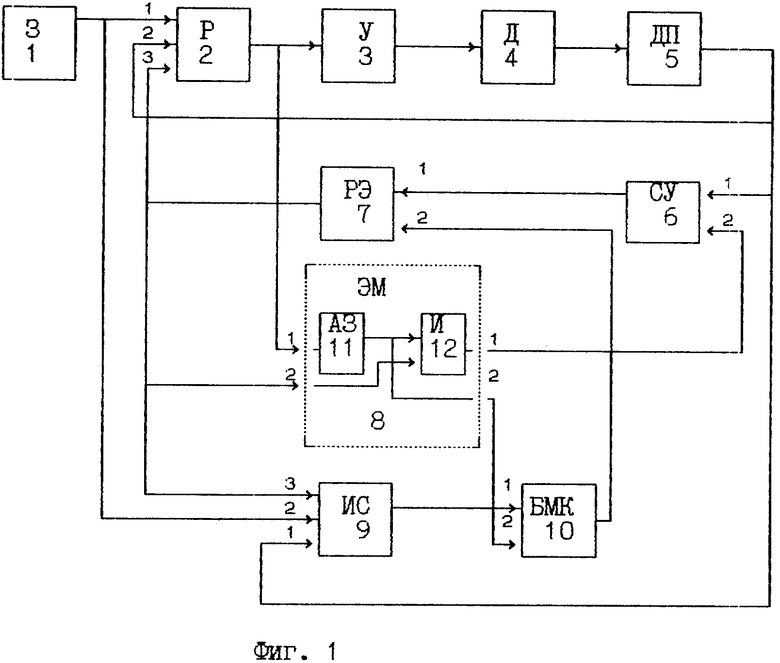
Электрогидравлическая следящая система, содержащая последовательно соединенные задатчик, регулятор, усилитель, гидродвигатель, датчик положения, идентификатор состояния и блок масштабных коэффициентов, выход датчика положения соединен с вторым входом регулятора, выход задатчика подключен к второму входу идентификатора состояния, а также эталонную модель, отличающаяся тем, что в нее введены последовательно соединенные суммирующее устройство и релейный элемент, выход которого соединен с третьими входами регулятора и идентификатора состояния и с вторым входом эталонной модели, второй вход релейного элемента соединен с выходом блока масштабных коэффициентов, первый вход суммирующего устройства подключен к выходу датчика положения, второй - к первому выходу эталонной модели, выход регулятора соединен с первым входом эталонной модели, второй выход которой подключен к второму входу блока масштабных коэффициентов, при этом эталонная модель состоит из последовательно соединенных апериодического звена и интегратора, выход последнего подключен к первому выходу эталонной модели, второй выход которой соединен с выходом апериодического звена, первый вход эталонной модели подключен к входу апериодического звена, ее второй вход - к второму входу интегратора.
| Новое в проектировании и эксплуатации автоматических приводов и систем гидроавтоматики | |||
| - Л.: ЛЖНТП, 1984, с.63 - 66 | |||
| Новое в проектировании и эксплуатации автоматических приводов и систем гидроавтоматики | |||
| - Л.: ЛДНТП, 1987, с | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| SU, авторское свидетельство, 928300, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |

