Изобретение относится к системам автоматического управления и может быть использовано в автоматизированных электроприводах с повышенными требованиями к точности и качеству регулирования, например, в следящих электроприводах систем числового программного управления (ЧПУ) металлорежущими станками и промышленными роботами, в следящих системах наведения оптических (астрономических) телескопов и в других высокоточных системах управления различными технологическими объектами.
В существующих системах подчиненного управления электроприводами обычно применяют ПИ- и ПИД-регуляторы в сочетании со стандартными настройками систем на оптимум по модулю, на симметричный оптимум и др. Известна система подчинённого управления электроприводами такого вида [1]. Система содержит датчик тока, датчик скорости, регулятор тока, регулятор скорости. На входах каждого регулятора установлены элементы сравнения. Вход элемента сравнения в регуляторе скорости соединен со входом системы подчинённого управления. Второй вход этого элемента сравнения соединён с датчиком скорости, выход элемента сравнения соединен со входом регулятора скорости, выход регулятора скорости соединен со входом элемента сравнения в регуляторе тока, второй вход этого элемента сравнения соединен с датчиком тока, выход элемента сравнения соединен с регулятором тока, выход регулятора тока соединен со входом объекта управления, который имеет два выхода, к первому выходу подключен датчик тока, ко второму выходу подключен датчик скорости, регулятор тока и регулятор скорости в зависимости от настройки представляют собой П- или ПИД-регуляторы.
Недостаток данной системы подчинённого управления в том, что применение вышеуказанных регуляторов ограничено возникновением во время переходных процессов перерегулирований, колебаний и повышенной инерционности. Их робастность (нечувствительность системы управления к изменениям параметров объекта управления и к шумам в сигналах управления) низкая.
Наиболее близким по технической сущности аналогом (прототипом) изобретения служит система подчинённого регулирования параметров электропривода [2], выполненная по структуре с каскадным соединением замкнутых контуров и последовательным соединением регуляторов, в цепь регулирования перед входами регуляторов внутренних контуров регулирования включены дополнительные элементы сравнения, на вторые входы которых подключены выходы датчиков регулируемых величин соответствующих контуров, в цепь каждой из ранее дополнительных обратных связей включено динамическое звено с передаточной функцией, равной передаточной функции объекта регулирования соответствующего внешнего контура, а вход динамического звена, т. е. вход цепи обратной связи, подключен к выходу дополнительного элемента сравнения внутреннего контура.
Недостатки прототипа – сравнительно невысокое качество переходных процессов, связанное с низким быстродействием контуров регулирования на основе усилителей в виде простых ПИ-регуляторов, что ограничивает диапазон регулирования скорости электропривода, недостаточная эффективность фильтрации сигналов обратной связи, поступающих с датчика скорости, обусловленная применением в усилителях вышеуказанных ПИ-регуляторов и недостаточная робастность системы управления.
Технический результат изобретения – обеспечение высокой робастности системы управления, увеличение её точности и улучшение качества регулирования.
Технический результат достигается самонастраивающейся робастной системой управления, содержащей регулятор эталонной модели, эталонную модель, регулятор объекта управления, объект управления и датчик скорости, в которой в отличие от прототипа вход системы управления соединён через задатчик интенсивности с входом регулятора объекта управления, состоящим из последовательно соединенных первого, второго и третьего внутренних регуляторов, на входах которых установлены элементы сравнения, вторые входы которых соединены с выходом датчика скорости так, что каждый внутренний регулятор в регуляторе объекта управления образует соответственно свой первый, второй и третий контуры регулирования, выход внутреннего регулятора в первом контуре регулирования соединён со входом объекта управления, а выходы второго и третьего внутренних регуляторов соединены со входами элементов сравнения, установленными соответственно на входах первого и второго внутренних регуляторов, причём каждый внутренний регулятор состоит из встроенного регулятора и последовательно соединённого с ним предикатора, который включает в себя внутреннее звено и последовательно соединённые первое и второе внешние звенья, первый и второй элементы сравнения, причем вход внутреннего регулятора является входом встроенного регулятора, выход встроенного регулятора соединён с первым входом первого элемента сравнения, второй вход которого соединён с выходом внутреннего звена, а выход первого элемента сравнения соединён с выходом предикатора, а также со входом первого внешнего звена и с первым входом второго элемента сравнения, второй вход которого соединен с выходом второго внешнего звена, а выход второго элемента сравнения соединен со входом внутреннего звена, причём выход предикатора является выходом внутреннего регулятора.
Согласно изобретению в каждом предикаторе внутреннее звено может содержать интегрирующее звено, каждое внешнее звено может содержать экспоненциальное звено, встроенный регулятор в первом контуре может содержать позиционное звено, встроенный регулятор во втором и в третьем контурах может содержать интегрирующее звено.
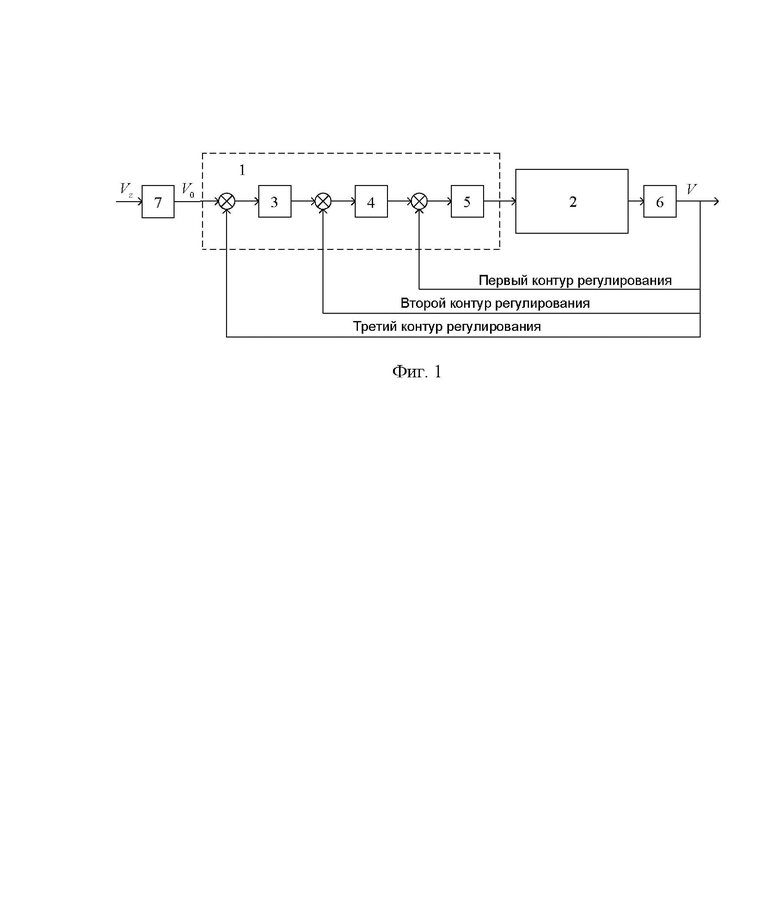
Сущность изобретения поясняется чертежами, где на фиг. 1 показана общая структурная схема самонастраивающейся робастной системы управления, на фиг. 2 – схемы, поясняющие принцип действия и работу предикатора, на фиг 3 – схема внутреннего регулятора. на фиг.4 – схема эталонной модели, на фиг. 5 – 8 графики, полученные в результате имитационного моделирования.
В состав самонастраивающейся робастной системы управления входят: регулятор объекта управления 1, объект управления 2, внутренние регуляторы на основе предикаторов 3 – 5, датчик скорости 6, задатчик интенсивности 7.
Рассмотрим работу самонастраивающейся робастной системы управления. Задающий сигнал скорости  поступает в регулятор объекта управления 1 через задатчик интенсивности 7. В регуляторе объекта управления этот сигнал через элемент сравнения передается на вход цепи из последовательно соединенных внутренних регуляторов 3, 4 и 5, которые построены на основе соответствующих предикаторов. На входах внутренних регуляторов 3, 4 и 5 установлены элементы сравнения, на вторые входы которых подается сигнал скорости
поступает в регулятор объекта управления 1 через задатчик интенсивности 7. В регуляторе объекта управления этот сигнал через элемент сравнения передается на вход цепи из последовательно соединенных внутренних регуляторов 3, 4 и 5, которые построены на основе соответствующих предикаторов. На входах внутренних регуляторов 3, 4 и 5 установлены элементы сравнения, на вторые входы которых подается сигнал скорости  с выхода датчика скорости 6. В результате каждый внутренний регулятор образует свой контур регулирования, соответственно первый, второй, третий.
с выхода датчика скорости 6. В результате каждый внутренний регулятор образует свой контур регулирования, соответственно первый, второй, третий.
Сигнал  на выходе задатчика интенсивности 7 задает желаемую скорость объекта управления. Если электропривод работает на холостом ходу, без внешней нагрузки, а параметры объекта управления 2 совпадают с расчетными значениями, то сигнал скорости
на выходе задатчика интенсивности 7 задает желаемую скорость объекта управления. Если электропривод работает на холостом ходу, без внешней нагрузки, а параметры объекта управления 2 совпадают с расчетными значениями, то сигнал скорости  на выходе датчика скорости 6 совпадает с сигналом желаемой скорости
на выходе датчика скорости 6 совпадает с сигналом желаемой скорости  на выходе задатчика интенсивности 7. Появление момента нагрузки
на выходе задатчика интенсивности 7. Появление момента нагрузки  на электродвигателе или изменение параметров объекта управления, отличных от расчетных значений, приводят к отклонению скорости объекта управления от желаемой скорости. В этом случае включается в работу регулятор объекта управления 1, который изменяя сигнал на своем выходе, восстанавливает скорость объекта управления до желаемой скорости.
на электродвигателе или изменение параметров объекта управления, отличных от расчетных значений, приводят к отклонению скорости объекта управления от желаемой скорости. В этом случае включается в работу регулятор объекта управления 1, который изменяя сигнал на своем выходе, восстанавливает скорость объекта управления до желаемой скорости.
Благодаря предикаторам во внутренних регуляторах реальные параметры объекта управления могут отличаться от расчетных значений в достаточно широких пределах без ухудшения качества регулирования. Переходные характеристики процесса регулирования при ступенчатом изменении задающего воздействия  не имеют перерегулирований.
не имеют перерегулирований.
Датчика тока в рассматриваемой самонастраивающейся системе управления нет, что является её важной отличительной особенностью. Стабильная работа системы обеспечивается за счет быстродействующих внутренних регуляторов 3 – 5, построенных на основе предикаторов. В контурах управления с указанными регуляторами переходные процессы не имеют перерегулирований, а постоянные времени звеньев во внутренних регуляторах весьма малы, причем общая инерционность регулятора объекта управления 1 мало зависит от числа включенных последовательно внутренних регуляторов.
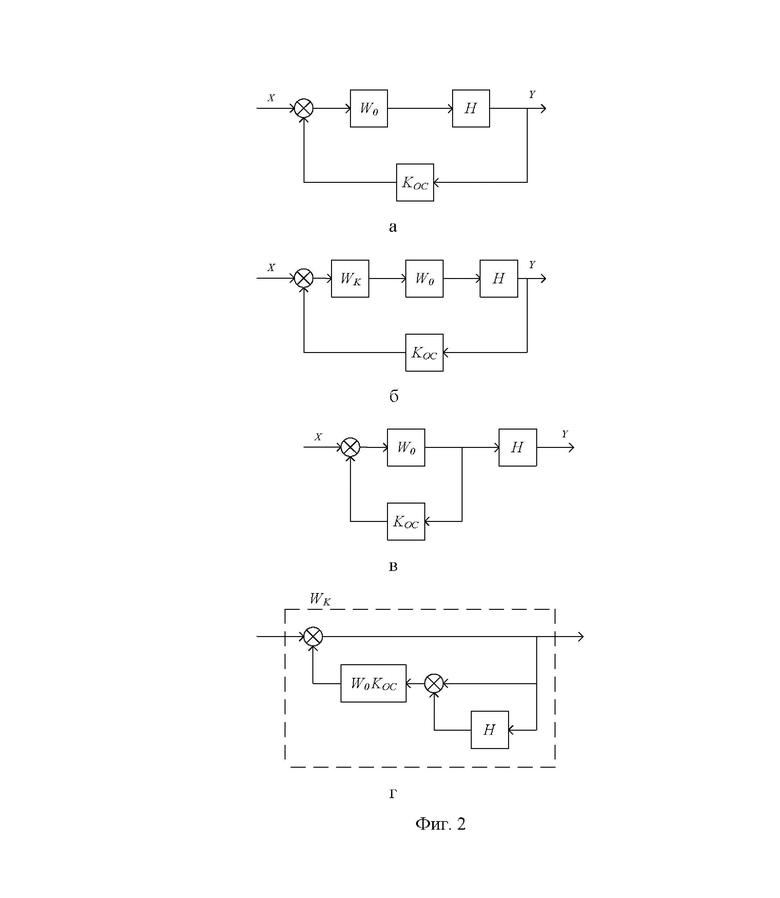
Системы автоматического управления с использованием предикаторов ранее в литературе не были известны. Поэтому, рассмотрим принцип действия предикатора на математическом уровне. Допустим, что имеется система управления, в которой содержится простое апериодическое или интегрирующее звено 1-го порядка  , некоторое звено с передаточной функцией
, некоторое звено с передаточной функцией  и обратная связь с коэффициентом передачи
и обратная связь с коэффициентом передачи  (фиг. 2, а). Звеном
(фиг. 2, а). Звеном  может быть апериодическое, интегрирующее или колебательное звено, группа последовательно соединённых звеньев или, наконец, звено чистого запаздывания. В общем случае звено оказывает вредное влияние на процесс управления, ограничивая общий коэффициент усиления разомкнутой системы.
может быть апериодическое, интегрирующее или колебательное звено, группа последовательно соединённых звеньев или, наконец, звено чистого запаздывания. В общем случае звено оказывает вредное влияние на процесс управления, ограничивая общий коэффициент усиления разомкнутой системы.
Введём в систему последовательное корректирующее устройство с передаточной функцией  (фиг.2, б). Тогда передаточная функция замкнутой системы с будет равна:
(фиг.2, б). Тогда передаточная функция замкнутой системы с будет равна:

Поставим задачу определить неизвестную структуру корректирующего звена  так, чтобы звено с передаточной функцией
так, чтобы звено с передаточной функцией  оказалось вынесенным за контур обратной связи и не влияло на процесс управления (фиг. 2, в).
оказалось вынесенным за контур обратной связи и не влияло на процесс управления (фиг. 2, в).
Заданной структурной схеме соответствует выражение

Приравнивая уравнения (1) и (2), находим неизвестную величину  .
.

Звено с передаточной функцией Н оказалось вынесенным за контур обратной связи и не оказывает вредного влияния на процесс управления. Структурная схема такого корректирующего устройства представлена на фиг.2, г.
Данное корректирующее устройство предопределяет управляющее воздействие, передаваемое на объект, и названо предикатором. Звено  – это одно звено или ряд последовательно соединенных звеньев. Общее произведение коэффициентов передач этих звеньев требуется перенести внутрь контура обратной связи. В противном случае коэффициент передачи результирующей эквивалентной системы контура регулирования будет вычислен неверно.
– это одно звено или ряд последовательно соединенных звеньев. Общее произведение коэффициентов передач этих звеньев требуется перенести внутрь контура обратной связи. В противном случае коэффициент передачи результирующей эквивалентной системы контура регулирования будет вычислен неверно.
Применим рассмотренную методику преобразования структурных схем систем автоматического управления для построения внутренних регуляторов 3 – 5, входящих в состав регулятора объекта управления 1. В общем виде каждый внутренний регулятор (фиг. 3) включает встроенный регулятор 8, внутреннее звено 9 и внешние звенья 10, 11, а также элементы сравнения 12 и 13.
Раскроем на математическом уровне структуру указанных регуляторов. Для этого рассмотрим внутреннюю структуру объекта управления 2 (фиг. 4). Он включает усилитель мощности 14, якорную цепь двигателя 15, постоянный коэффициент 16, и якорь двигателя 17. Все эти звенья соединены последовательно. Во время работы электропривода ЭДС якоря, пропорциональная скорости его вращения, через коэффициент 18 вычитается на входе якорной цепи 15. На якорь двигателя 17 передается через вычитающий элемент момент внешней нагрузки  .
.
Усилитель мощности – экспоненциальное звено
 ,
,
где  - коэффициент усиления,
- коэффициент усиления,  - постоянная времени усилителя.
- постоянная времени усилителя.
Якорная цепь двигателя – экспоненциальное звено
 ,
,
где  - коэффициент передачи,
- коэффициент передачи,  - постоянная времени звена.
- постоянная времени звена.
Якорь двигателя – интегрирующее звено
 ,
,
где  - коэффициент передачи звена.
- коэффициент передачи звена.
Каждый из коэффициентов 16 и 18 – постоянная ЭДС, С.
Рассмотрим построение трех внутренних регуляторов в составе, регулятора объекта управления 1. В каждый из трех внутренних регуляторов входит встроенный П- или ПИ-регулятор в сочетании с соответствующим предикатором.
Рассмотрим первый контур регулирования.
Встроенный регулятор – П-регулятор  .
.
Внутреннее звено
 ,
,
где  , где в свою очередь
, где в свою очередь  – коэффициент передачи датчика скорости.
– коэффициент передачи датчика скорости.
Внешние звенья
 .
.
Передаточная функция замкнутого контура регулирования
 , где
, где  ,
,  .
.
Эквивалентная схема контура регулирования 1 представляет собой три последовательно соединенных апериодических звена без обратной связи.

Рассмотрим второй контур регулирования.
Встроенный регулятор – ПИ-регулятор
 .
.
Внутреннее звено
 ,
,
где  .
.
Внешние звенья
 .
.
Передаточная функция замкнутого контура регулирования.
 , где
, где  ,
, 
Эквивалентная схема контура регулирования 2 – три последовательно соединенных апериодических звена без обратной связи
 .
.
Рассмотрим третий контур регулирования.
Встроенный регулятор – ПИ-регулятор
 .
.
Внутреннее звено
 ,
,
где  .
.
Внешние звенья
 .
.
Передаточная функция замкнутого контура регулирования.
 , где
, где  ,
, 
Теперь эквивалентная схема контура регулирования 3 представляет собой три последовательно соединенных апериодических звена с весьма малыми постоянными времени при отсутствии обратной связи.
Поэтому общая переходная характеристика регулятора объекта управления 1 не имеют перерегулирований.
Благодаря интеграторам, встроенным во внутренние регуляторы 2-го и 3-го контуров управления, система управления становится астатической 2-го порядка. Это означает, что в установившемся режиме скорость электродвигателя не зависит от внешней нагрузки, т.е. диапазон регулирования скорости электропривода теоретически равен бесконечности. В реальных условиях этот диапазон регулирования ограничен разрешающей способностью датчика скорости.
Постоянные времени  эквивалентных апериодических звеньев следует выбирать минимально возможными. Чем меньше значения этих постоянных времени, тем выше робастность самонастраивающейся системы управления.
эквивалентных апериодических звеньев следует выбирать минимально возможными. Чем меньше значения этих постоянных времени, тем выше робастность самонастраивающейся системы управления.
Вместе с тем, робастность системы зависит от скорости изменения входного управляющего воздействия  . Это воздействие должно изменяться плавно. Поэтому на входе регулятора эталонной модели установлен задатчик интенсивности 7 в виде двух последовательно соединенных апериодических звеньев с некоторыми постоянными времени
. Это воздействие должно изменяться плавно. Поэтому на входе регулятора эталонной модели установлен задатчик интенсивности 7 в виде двух последовательно соединенных апериодических звеньев с некоторыми постоянными времени  . В роли задатчика интенсивности может выступать специальный модуль разгона-торможения, как, например, в системах ЧПУ металлорежущими станками и роботами. Постоянная времени должна быть больше постоянных времени , как минимум на порядок. Одновременно задатчик интенсивности 7 ограничивает броски пускового тока в электродвигателе, которые при высоком быстродействии регуляторов могут быть недопустимо большими.
. В роли задатчика интенсивности может выступать специальный модуль разгона-торможения, как, например, в системах ЧПУ металлорежущими станками и роботами. Постоянная времени должна быть больше постоянных времени , как минимум на порядок. Одновременно задатчик интенсивности 7 ограничивает броски пускового тока в электродвигателе, которые при высоком быстродействии регуляторов могут быть недопустимо большими.
Рассмотрим результаты имитационного моделирования самонастраивающейся робастной системы управления. На компьютере выполнено имитационное моделирование электропривода на основе вентильного двигателя ПБВ100L с его номинальным моментом 10,5 Нм. Значения постоянных времени звеньев в регуляторе объекта управления  мкс. Постоянная времени звеньев в задатчике интенсивности
мкс. Постоянная времени звеньев в задатчике интенсивности  мс. Система из 16 дифференциальных уравнений решалась методом Рунге-Кутты с шагом интегрирования
мс. Система из 16 дифференциальных уравнений решалась методом Рунге-Кутты с шагом интегрирования  мкс. На первоначальном этапе моделирования принимаем датчик скорости аналоговым, т. е. идеальным.
мкс. На первоначальном этапе моделирования принимаем датчик скорости аналоговым, т. е. идеальным.
Характеристики пуска двигателя на холостом ходу при ступенчатом задающем сигнале  , составляющем 0,1 от номинального значения (фиг. 5) показывают, что время переходного процесса составляет 40 мс. Пусковой ток двигателя
, составляющем 0,1 от номинального значения (фиг. 5) показывают, что время переходного процесса составляет 40 мс. Пусковой ток двигателя  достигает значения 43А (фиг. 5, а), скорость двигателя
достигает значения 43А (фиг. 5, а), скорость двигателя  изменяется плавно, без перерегулирования (фиг. 5, б).
изменяется плавно, без перерегулирования (фиг. 5, б).
Чтобы оценить робастность системы управления, зададим значения параметров объекта управления не равные расчетным значениям. График переходной характеристики двигателя (фиг. 6, а) при увеличенном коэффициенте усиления усилителя  в 5 раз показывает хорошее качество регулирования. Уменьшение постоянной времени усилителя
в 5 раз показывает хорошее качество регулирования. Уменьшение постоянной времени усилителя  в 5 раз мало влияет на работу самонастраивающейся системы управления (фиг. 6, б). Отклонение других параметров объекта управления в большую или в меньшую сторону в 5 раз не оказывает заметного влияния на работу самонастраивающейся системы управления. Ступенчатое изменение рассмотренных параметров в 5 раз непосредственно во время работы электропривода также практически не влияет на его работу.
в 5 раз мало влияет на работу самонастраивающейся системы управления (фиг. 6, б). Отклонение других параметров объекта управления в большую или в меньшую сторону в 5 раз не оказывает заметного влияния на работу самонастраивающейся системы управления. Ступенчатое изменение рассмотренных параметров в 5 раз непосредственно во время работы электропривода также практически не влияет на его работу.
Оценим реакцию системы управления на внешнюю нагрузку. Наброс номинальной нагрузки на электродвигатель с нулевой начальной скоростью приводит к увеличению тока до 26А (фиг. 7, а) и кратковременному (2 мс) провалу скорости на величину 0,4 рад/с (фиг. 7, б), что по отношению к номинальной скорости электропривода составляет 0,2 %.
В заключение определим диапазон регулирования скорости электропривода. Задав управляющее воздействие  , наблюдаем устойчивое значение скорости электропривода
, наблюдаем устойчивое значение скорости электропривода  , что соответствует диапазону регулирования
, что соответствует диапазону регулирования  (фиг. 8, б).
(фиг. 8, б).
На малых скоростях движения электропривода обычный датчик скорости – тахогенератор неработоспособен. Поэтому его роль, как правило, выполняет фотоэлектрический датчик положения (энкодер). Применим серийный энкодер ЛИР-376 СКБ ИС с числом ипульсов на один оборот  . В этом случае возникает проблема, связанная с фильтрацией шумов квантования энкодера. Чтобы их уменьшить использован оригинальный способ измерения скорости перемещения [3], который программно реализован в виде рекуррентного экстраполятора.
. В этом случае возникает проблема, связанная с фильтрацией шумов квантования энкодера. Чтобы их уменьшить использован оригинальный способ измерения скорости перемещения [3], который программно реализован в виде рекуррентного экстраполятора.
Шумы кванования энкодера, поступающие по цепи обратной связи в регулятор объекта управления, фильтруются в апериодических звеньях, которые имеются во внутренних регуляторах 3 – 5. Необходимо улучшить фильтрацию шумов квантования и иных сигнальных шумов при самых малых скоростях движения, что имеет важное значение, когда регулируемый электропривод входит в состав следящего электропривода. Для этого вводим параметрическую связь. Автоматически увеличиваем постоянные времени  от
от  до
до  в зависимости от текущей величины заданной скорости
в зависимости от текущей величины заданной скорости  на выходе задатчика интенсивности по формуле:
на выходе задатчика интенсивности по формуле:
 ,
,
где  ,
,  ,
,
 ,
,  - максимальное задающее воздействие,
- максимальное задающее воздействие,
 - коэффициент крутизны гиперболы.
- коэффициент крутизны гиперболы.
Диапазон регулирования скорости при использовании энкодера в качестве датчика скорости составляет не менее 500000. Хорошая робастность электропривода позволяет уменьшать или увеличивать его параметры по сравнению с расчетными значениями не менее, чем в два раза, без ухудшения качества регулирования.
Таким образом, самонастраивающаяся робастная система управления благодаря автоматической самонастройке параметров регулятора обеспечивает высокое быстродействие и точность регулирования скорости электропривода при отсутствии перерегулирования, имеет широкий диапазон регулирования скорости, обладает повышенной помехозащищенностью и может применяться в промышленных электроприводах различного назначения.
1. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учеброе пособие для вузов. – Л.: Энергоиздат. Ленингр. отд-ние, 1982. – 392 с.
2. Боровиков М.А. Система подчинённого регулирования параметров электропривода. Авт. свид. СССР № 527809. МПК G 05 D 13/66. Опубл. 09. 05. 1976. Бюл. №3.
3. Чикуров Н.Г., Михайловский А.И., Шахмаев Р.Г., Гайсин Ш.М. Способ измерения скорости перемещения и устройство для его осуществления. Авт. свид. СССР, №1597730. МПК G01P3/489, Зарег. 8 06.1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Самонастраивающийся регулятор подачиМЕТАллОРЕжущЕгО CTAHKA | 1978 |
|
SU824138A1 |
| Следящий электропривод с переменным моментом инерции | 1983 |
|
SU1141375A1 |
| Самонастраивающаяся система регулирования скорости | 1981 |
|
SU1007083A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1290255A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Самонастраивающаяся система регулирования скорости | 1984 |
|
SU1180844A2 |


Изобретение относится к системам автоматического управления и может быть использовано в автоматизированных электроприводах с повышенными требованиями к точности и качеству регулирования, например в следящих электроприводах систем числового программного управления (ЧПУ) металлорежущими станками и промышленными роботами, в следящих системах наведения оптических (астрономических) телескопов и в других высокоточных системах управления различными технологическими объектами. Технический результат достигается самонастраивающейся робастной системой управления, содержащей регулятор эталонной модели, эталонную модель, регулятор объекта управления, объект управления и датчик скорости, в которой в отличие от прототипа вход системы управления соединён через задатчик интенсивности с входом регулятора объекта управления, состоящим из последовательно соединенных первого, второго и третьего внутренних регуляторов, на входах которых установлены элементы сравнения, вторые входы которых соединены с выходом датчика скорости так, что каждый внутренний регулятор в регуляторе объекта управления образует соответственно свой первый, второй и третий контуры регулирования, выход внутреннего регулятора в первом контуре регулирования соединён с входом объекта управления, а выходы второго и третьего внутренних регуляторов соединены со входами элементов сравнения, установленными соответственно на входах первого и второго внутренних регуляторов, причём каждый внутренний регулятор состоит из встроенного регулятора и последовательно соединённого с ним предикатора, который включает в себя внутреннее звено и последовательно соединённые первое и второе внешние звенья, первый и второй элементы сравнения, причем вход внутреннего регулятора является входом встроенного регулятора, выход встроенного регулятора соединён с первым входом первого элемента сравнения, второй вход которого соединён с выходом внутреннего звена, а выход первого элемента сравнения соединён с выходом предикатора, а также с входом первого внешнего звена и с первым входом второго элемента сравнения, второй вход которого соединен с выходом второго внешнего звена, а выход второго элемента сравнения соединен с входом внутреннего звена, причём выход предикатора является выходом внутреннего регулятора. Самонастраивающаяся робастная система управления благодаря автоматической самонастройке параметров регулятора обеспечивает высокое быстродействие и точность регулирования скорости электропривода при отсутствии перерегулирования, имеет широкий диапазон регулирования скорости, обладает повышенной помехозащищенностью и может применяться в промышленных электроприводах различного назначения. 1 з.п. ф-лы, 8 ил.
1. Самонастраивающаяся робастная система управления, содержащая три соподчинённых контура регулирования, в каждом из которых последовательно включены регулятор и объект управления, к выходу объекта управления подключен датчик скорости, отличающаяся тем, что вход системы управления соединён через задатчик интенсивности с входом регулятора объекта управления, состоящим из последовательно соединенных первого, второго и третьего внутренних регуляторов, на входах которых установлены элементы сравнения, вторые входы которых соединены с выходом датчика скорости так, что каждый внутренний регулятор в регуляторе объекта управления образует свой контур регулирования, соответственно первый, второй и третий, выход внутреннего регулятора в первом контуре регулирования соединён с входом объекта управления, а выходы второго и третьего внутренних регуляторов соединены с входами элементов сравнения, установленными соответственно на входах первого и второго внутренних регуляторов, причём каждый внутренний регулятор состоит из встроенного регулятора и последовательно соединённого с ним предикатора, который включает в себя внутреннее звено и последовательно соединённые первое и второе внешние звенья, первый и второй элементы сравнения, причем вход внутреннего регулятора является входом встроенного регулятора, выход встроенного регулятора соединён с первым входом первого элемента сравнения, второй вход которого соединён с выходом внутреннего звена, а выход первого элемента сравнения соединён с выходом предикатора, а также с входом первого внешнего звена и с первым входом второго элемента сравнения, второй вход которого соединен с выходом второго внешнего звена, а выход второго элемента сравнения соединен с входом внутреннего звена, причём выход предикатора является выходом внутреннего регулятора.
2. Система управления по п. 1, отличающаяся тем, что в каждом предикаторе внутреннее звено содержит интегрирующее звено, каждое внешнее звено содержит экспоненциальное звено, встроенный регулятор в первом контуре содержит позиционное звено, встроенный регулятор во втором и в третьем контурах содержит интегрирующее звено.
| Система подчиненного регулирования параметров электропривода | 1975 |
|
SU527809A1 |
| Самонастраивающаяся система управления | 1987 |
|
SU1425600A1 |
| Состав для получения безборного и безщелочного нейтрального стекла | 1958 |
|
SU125360A1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1999 |
|
RU2156993C1 |

