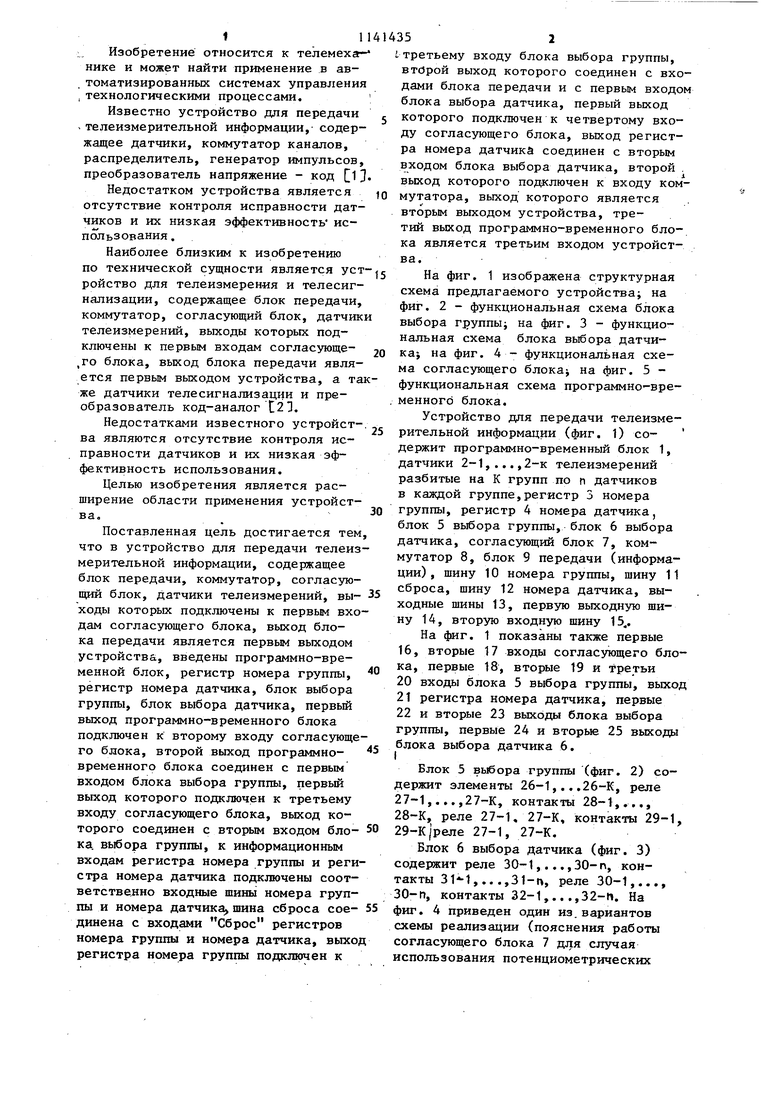
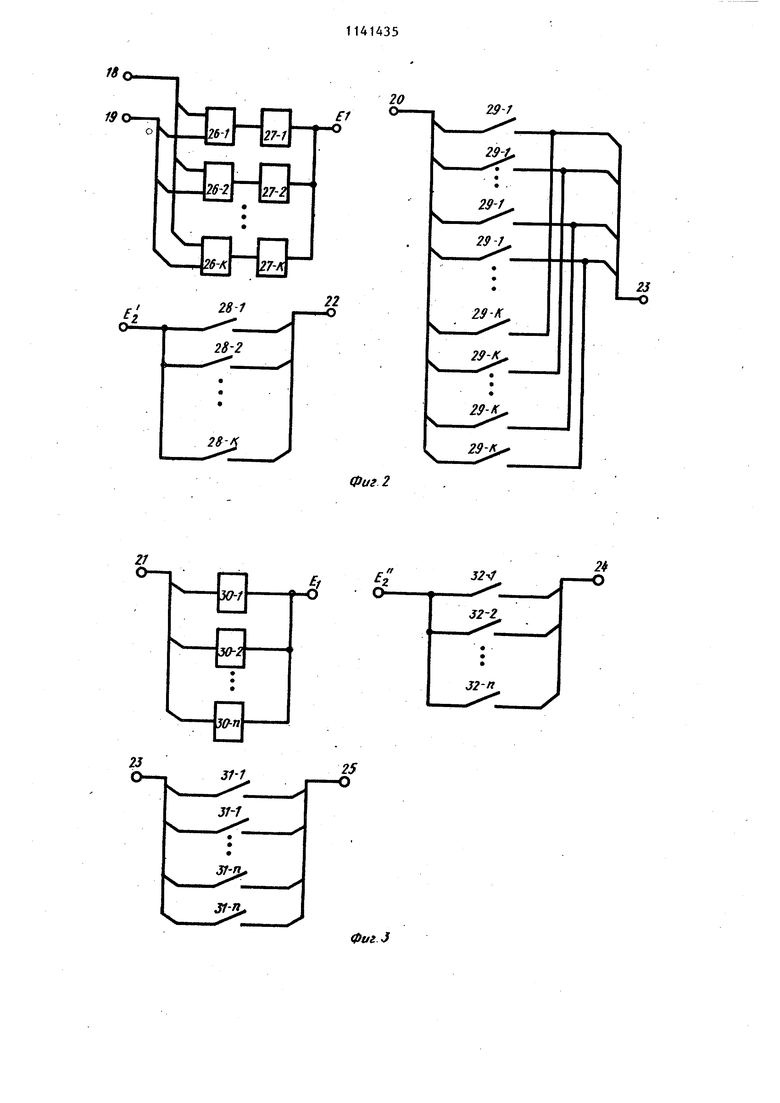
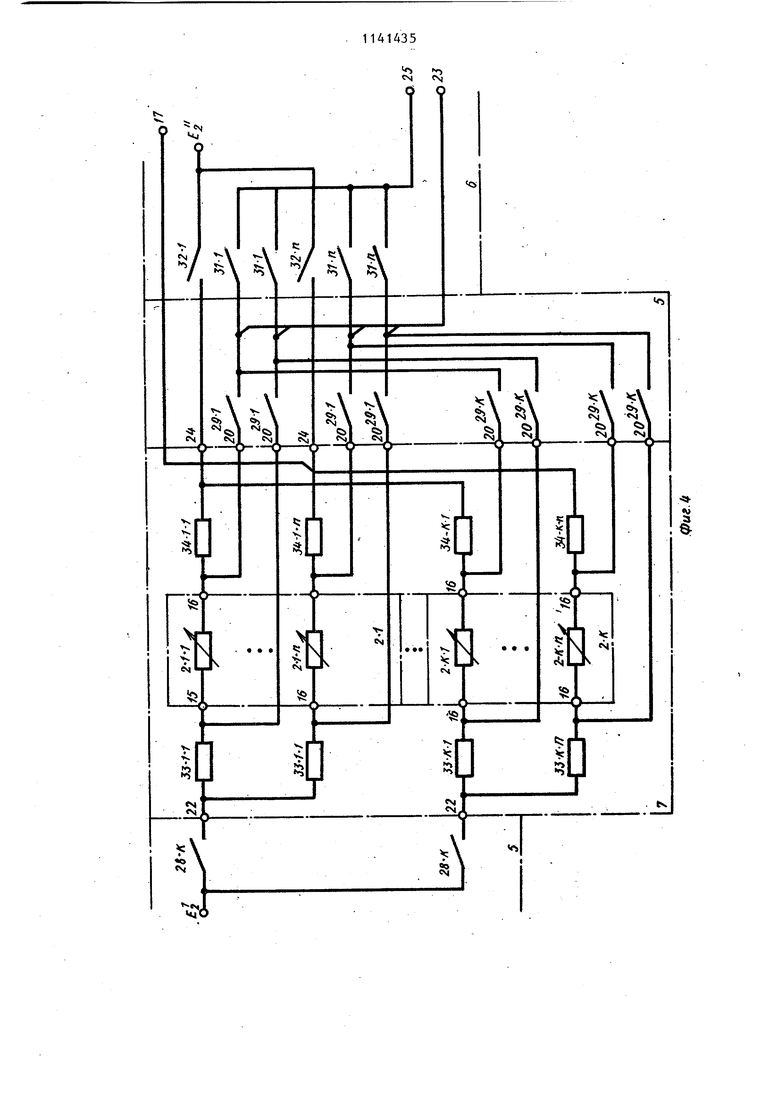
: Изобретение относится к телемеханике и может найти применение в автоматизированных системах управления , технологическими процессами. Известно устройство для передачи телеизмерительной информации, содержащее датчики, коммутатор каналов, распределитель, генератор импульсов, преобразователь напряжение - код 1 Недостатком устройства является отсутствие контроля исправности датчиков и их низкая эффективность использования . Наиболее близким к изобретению по технической сущности является ycT ройство для телеизмерения и телесигнализации, содержащее блок передачи, коммутатор, согласующий блок, датчик телеизмерений, выходы которых подключены к первым входам согласующе,го блока, выход блока передачи является первым выходом устройства, а та же датчики телесигнализации и преобразователь код-аналог С21. Недостатками известного устройства являются отсутствие контроля исправности датчиков и их низкая эффективность использования. Целью изобретения является расширение области применения устройства. Поставленная цель достигается тем что в устройство для передачи телеиз мерительной информации, содержащее блок передачи, коммутатор, согласующий блок, датчики телеизмерений, выходы которых подключены к первым вхо дам согласующего блока, выход блока передачи является первым выходом устройства, введены программно-временной блок, регистр номера группы, регистр номера датчика, блок выбора группы, блок выбора датчика, первый выход программно-временного блока подключен к второму входу согласующе го блока, второй выход программновременного блока соединен с первым входом блока выбора группы, первый выход которого подключен к третьему входу согласующего блока, выход которого соединен с вторым входом блока. выбора группы, к информационным входам регистра номера группы и реги стра номера датчика подключены соответственно входные шины номера группы и номера датчика шина сброса соединена с входами Сброс регистров номера группы и номера датчика, выхо регистра номера группы подключен к третьему входу блока выбора группы, второй выход которого соединен с входами блока передачи и с первым входом блока выбора датчика, первый вьпсод которого подключен к четвертому входу согласующего блока, выход регистра номера датчика соединен с вторым входом блока выбора датчика, второй . выход которого подключен к входу коммутатора, выход которого является вторым выходом устройства, третий выход программно-временного бло-. ка является третьим входом устройства. На фиг. 1 изображена структурная схема предлагаемого устройства; на фиг. 2 - функциональная схема блока выбора группы; на фиг. 3 - функциональная схема блока выбора датчика; на фиг. 4 - функциональная схема согласующего блока; на фиг. 5 функциональная схема программно-временного блока. Устройство для передачи телеизмерительной информации (фиг. 1) содержит программно-временный блок 1, датчики 2-1,...,2-к телеизмерений разбитые на К групп по п датчиков в каждой группе,регистр 3 номера группы, регистр 4 номера датчика, блок 5 выбора группы, блок 6 выбора датчика, согласующий блок 7, коммутатор 8, блок 9 передачи (информации), шину 10 номера группы, шину 11 сброса, шину 12 номера датчика, выходные шины 13, первую выходную шину 14, вторую входную шину 15.. На фиг. 1 показаны также первые 16, вторые 17 входы согласующего блока, первые 18, вторые 19 и третьи 20входы блока 5 выбора группы, выход 21регистра номера датчика, первые 22и вторые 23 выходы блока выбора группы, первые 24 и вторые 25 выходы блока выбора датчика 6. Блок 5 выбора группы (фиг. 2) содержит элементы 26-1,...26-К, реле 27-1,...,27-К, контакты 28-1,..., 28-К, реле 27-1. 27-К, контакты 29-1, 29-К|реле 27-1, 27-К. Блок 6 выбора датчика (фиг. 3) содержит реле 30-1,...,30-п, контакты ,.. .,31-t, реле 30-1,..., ЗО-п, контакты 32-1,...,32-п. На фиг. 4 приведен один из. вариантов схемы реализации (пояснения работы согласующего блока 7 для случая использования потенциометрических
датчиков телеизмерений. На фиг. 4 показаны также части блоков выбора группы 5 и выбора датчика 6 и датчики 2-1-1,...,2-1-п,...,2-К-1,..., 2-К-п (К групп по п датчиков в каждои), связанные с согласующим блоком 7 который содержит первые нормирующие резисторы 33-1-1,...,33-1-п,..., ЗЗ-К-1 .и вторые нормирующие резисторы 34-1-1 ,.,. ,34-К-1 .
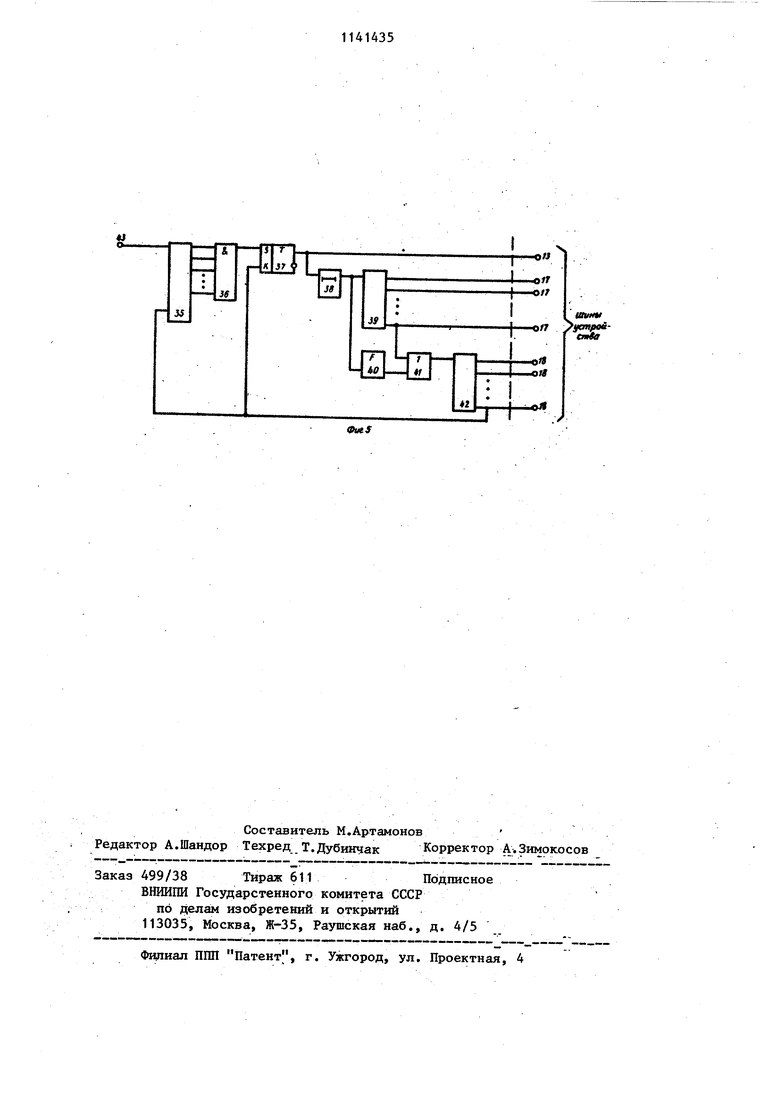
Программно-временный блок 1 (фиг. 5) содержит преобразователь 35 последовательного кода в параллельный, элемент И 36, триггер 37, элемент 38 задержки, первый кольцевой распределитель 39, формирователь 40 импульсов, элемент ИЛИ 41, второй коль11евой распределитель 42. .. Блок 5 выбора группы работает следующим образом..
При поступлении сигнала на один и входов 18 или 19 (допустим j ) через соответствующий элемент развязки 26-j срабатывает реле 27 J и замыкает свой контакт 28 j , через который первый полюс в.торого источника питания подключается к входам 22 согласующего блока 7 (к j -и группе датчиков 2 J ), и контакты 29 j , которые подключают выходы согласующего блока 7 (датчики 2 j) к входам блока передачи информации 9 и к входам 23 блока 6 выбора датчиков. При исчезновении сигнала на входах 18 и 19 соответствующее реле 27 обеспечивается, при этом оно размыкает свои контакть|у и отключает источник питания и блоки передачи 9 и выбора датчиков 6 от входов и выходов соответственно согласующего блока. Работа блока 6 выбора датчика. о При поступлении сигнала на один из входов 21 блока (допустим т-й) србатывает соответствующее реле 30 m и замыкает свои контакты 31т, через которые первые 23 входа блока 6 подключаются к выходам 25 этогб же блока, и контакт 3 2 - Ti , через который второй полюс второго источника питания подключается к соответствую. щему входу 24 согласующего блока 7 , (к в каждой группе датчиков). При исчезновении сигнала на входах 21 обесточивается реле 30 m , при этом оно размыкает свои контакты и „отключает источник питания от согла - сующего блока 7 и первые входы блока 6 (или, что то же самое, вторые входы блока 5) от вторых выходов 25 блока 6 (или, что то же самое, от входов коммутатора 8).
Работа программно-временного блока 1 .
Код вызова контролируемого пункта системы телемеханики поступает в последовательном виде из канала связи через приемник на вход блока 1 (этот вход на фиг. 1 не показан), в котором он поступает на вход 43 преобразователя 35. Последовательный код вызова преобразуется в параллельный вид, запоминается преобразователем 35 и выдается уже в параллельном виде на вторые выходы. В момент окончания преобразования преобразователь 35 выдает импульс на свой первый выход и, если на вторых выходах находится код, соответствующий номеру данного контролируемого пункта, то импульс проходит через элемент И 36 и устанавливает триггер 37 в единичн состояние. Сигнал с единичного выход триггера 37 поступает на выходную шину 13 устройства (в том случае, если для УВМ необходим код, а на один сигнал, между выходом триггера 37 и выходными шинами 13, становится шифратор), и на вход элемента 38 задержки.
Через время задержки (оно должно быть достаточно для отключения в устройстве согласующего блока 7 от УВМ) появляется сигнал на выходе элемента 38 задержки, запускающий формирователь 40 импульсов и первый кольцевой распределитель 39, который выполняется по кольцевой схеме и имеет в своем составе генератор, т.е. работает циклически до тех пор, пока-на входе имеется сигнал, на выходы распределитель 39 подключает (последовательно к каждому выходу) второй полюс второго источника. Формирователь 40 импульсов выдает импульс, переключающий второй кольцевой распределитель 42 в первое положение и на его первом выходе появляется сигнал. Распределитель 42 выпол нен также по кольцевой схеме, но он не имеет собственного генератора и переключается поэтому от импульсов, поступающих на его вход от их задних фронтов. Таким образом, если принят код вызова данного .контролируемого пункта, то выдается сигнал на первую из шин 18 устройства, и последовательно во времени подключается BTO рой полюс источника питания к шинам 17, В момент окончания сигнала на последнем выходе распределителя 39 через элемент ИЖ 41 распределитель 42 устанавливается в следующее поло жение, а распределитель 39 начинает следующий цикл работы. В момент окончания сигнала на последнем выходе распределителя 42 триггер 37 и запоминающий элемент преобразователя 35 устанавливаются в нулевое положе.ние. Частота и длительность импульсов генератора распределителя 39 выбираются такими, чтобы обеспечить четную передачу значения параметра, измеряемого датчиком в канал связи через блок 9 передачи.
Устройство передачи телеизмерител ной информации работает следующим об разом.
Предусмотрено два режима работы устройства:
работа.с управляющей вычислительной машиной (УВМ) ,
работа с системой телемеханики.
Работа с УЕМ.
Устройство большую часть времени находится в этом режиме. В этом режиме отсутствуют сигналы на выходах программно-временйого блока 1. Для вызова информации от какого-либо датчика 2-1-1,...,2-К-п УВМ заносит в регистр 3 код номера группы, в которой находится датчик, а в регистр 4 код номера датчика в группе. При этом вьщается сигнал на один из входов 19 блока 5 и на один из входов 21 блока 6, в которых включаются соответствующие реле, подключающие сво ими контактами второй источник питания к соответствующей группе датчиков (допустим 2 j ) и к соответствующему датчику в группе (допустим tn-му) . Это осуществляется контактами 27j и 32 т. Кроме того, из выходов согласунщего блока 7 в блоке 5 выбора группы на его вторые выходы подключаются контактами 29j выходы датчиков .только одной группы, а в блоке 6 выбора датчика на его выходы 25 и далее к коммутатору .8 подключается нормализованный сигнал одного датчика 2 j -т. С выхода коммутатора 8 сигнал через выходные шины 15 поступает в УВМ, которая считывает информацию о значении параметра. Для подключения другого датчика УВМ заносит в регистры 3 и 4 другие коды, срабатьшают соответствующие реле 27 и 30 и своими контактами подключают к УВМ цепь нормализации следующего датчика, одного из 2-1-1,... ,2-К-Г1. Работа с системой телемеханики. Этот режим начинается в момент окрнчйния приема вызова программно- . временным блоком 1, который выдает сигналы на шины 13. По этим сигналам УВМ вырабатывает сигнал сброса и выдает его на шину 11, регистры 3 и 4 устанавливаются в нулевое положение, обесточиваются реле 27-1,...,27-К, 30-1,...,30-h и своими контактами отключают второй источник питания и коммутатор 8 от согласующего блока 7. Через время задержки, необходимое для четкого отключения коммутатора 8 и второго источника питания от согласующего блока, программно-временный блок 1 выдает сигнал на первую из шин 18, при этом вновь включается реле 27, и на первую из шин 17, при этом подключается к блоку 9 передачи цепь согласования первого датчика первой группы. Далее появляются последовательно сигналы на остальных шинах 17, при этом последовательно к блоку 9 передачи подключаются цепи согласования остальных датчиков первой группы. После передачи значений параметров датчиков первой группы 2-1 появляется сигнал на шине 18 и на шине 17 и последовательно во времени к блоку 9 передачи подключаются цепи согласования датчиков второй группы 2-2. Аналогично передается информация о значениях параметров датчиков остальных групп на центральный пункт телемеханики. В момент окончания передачи информации о значении параметра последнего датчика последней группы исчезают сигналы на Шинах.13, и устройство переходит в режим Работа с УВМ. Таким образом, обеспечивается использование датчиков не только в системе телемеханики, но и в низовой системе управления. Что повышает эффективность использования датчиков
и позволяет с помощью УВМ.осуществлять;
. 1
контроль за исправностью датчиков путем их периодического опроса.
18
19
fOo.
20
/f O-
16
/Г
2lt
-
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ПАРАМЕТРОВ ЭЛЕКТРОННЫХ СХЕМ | 1991 |
|
RU2106677C1 |
| Автоматизированная система контроля параметров электронных схем | 1981 |
|
SU1010602A1 |
| Устройство пункта управления системы телемеханики | 1986 |
|
SU1374265A1 |
| Устройство для контроля интегральных схем | 1980 |
|
SU966699A1 |
| Система телемеханики | 1984 |
|
SU1257686A1 |
| Автоматизированная система контроля | 1989 |
|
SU1695269A1 |
| Комплексное телемеханическое устройство | 1972 |
|
SU525147A1 |
| В. В В. Ю. Ефимов и А. С. ПереборовВсесоюзный научно-исследовательский институт железнс транспорта и Ленинградский институт инженеров желез!транспорта | 1966 |
|
SU186529A1 |
| Устройство для контроля монтажа | 1986 |
|
SU1312616A1 |
| ВСЕСОЮЗНАЯ Л. А. Шойхет, А. С. Белима, А. Г. Мелик-Аскаров, }j^,..^,..,.. ^^^,,,,.,.^^В. М. Гаврилюк, Б. И. Семеняк и А. А. Казьмина р^"—"!Н1'~1':ХН'''-;5\?{ЛЯ | 1970 |
|
SU287550A1 |
УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ТЕЛЕИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ, содержащее блок передачи, коммутатор, согласующей блок, датчики телеизмерений, выходы которых подключены к первым входам согласующего блока, выход блока передачи является первьй выходом устройства, отлич ающ е е с я тем, что, с целью расшире-: ния области применения, в него введены программно-временной блок, регистр номера группы, регистр номера датчика, блок выбора группы, блок выбора датчика, первый выход программно-временного блока подключен к второму входу согласующего блока, второй выход программно-временного блока соединен с первым входом блока выбора группы, первый выход которого подключен к третьему входу согласующего блока, выход которого соединен с вторьм входом блока выбора группы, к информационным входам регистра номера группы и pertiCTpa номера датчика подключены соответственно входные шины номера группы и номера датчика, шина сброса соединена с входами Сброс регистров номера группы и номера датчика, выход регистра номера группы подключен к третьему входу (Л блока выбора груптщ, второй выход которого соединен с входами блока передачи и с первым входом блока выбора датчика, первый вькод которого подключен к четвертому входу согласующего блока, выход регистра нсжера датчика соединен с вторУм входом блока выбора датчика, второй выход которого подключен к входу коммутато со ел ра, выход которого является вторым выходом устройства J 5ретий выход программно-временного блока является третьим.входом устройства.
21
/2025
.-O/J
22
2В-1
д
28-2
2J
21
2
J2V J2-2
25
25
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для передачи телеизмерительной информации | 1975 |
|
SU546002A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для телеизмерения и телесигнализации | 1974 |
|
SU507891A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| (прототип). | |||
