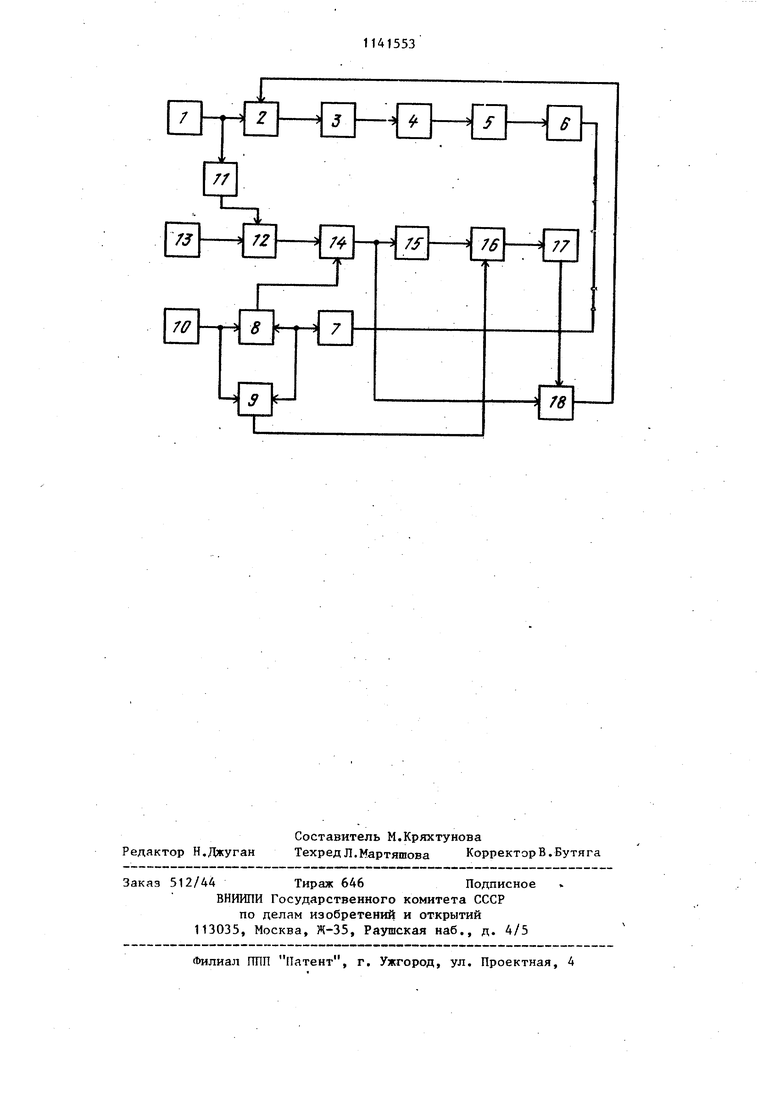
Изобретение относится к электротехнике и может быть применено в качестве привода подачи металлорежущих станков, в частности, при короткоходовом шлифовании на плоскошлифовальных станках. Известен привод стола плоскошлифовального станка, в котором возвра но-поступательное движение стола осуществляется гидроцилиндром LlJ« Однако такой привод с тожен в эксплуатации из-за разветвленной гидросистемы и не обеспечивает регу лирование ускорения. Наиболее близким к изобретению техническим решением является элект ропривод подачи металлорежущего ста ка, содержащий электродвигатель и последовательно соединенные задатчик скорости, задатчик интенсивност систему управления, преобразователь выход которого подключен к электродвигателю, в якорную цепь которого ключен датчик тока . Однако для коротковходового пшифования при изменяющихся длине хода установившейся скорости стола и массы детали постоянство ускорения обеспечивает полное использование электродвигателя, так как ускорение выбирается из наихудших условий работы (минимальное перемещение, максимальная установившаяся скорость стола и максимальная масса обрабаты ваемой -детали), что снижает произ- водительность станка. Целью изобретения является повышение производительности. Поставленная цель достигается тем что в электропривод подачи ме таллорежущего станка, содержащий электродвигатель и последовательно соединенные задатчик скорости,,задатчик интенсивности, систему управ ления, преобразователь, выход которого подключен к электродвигателю . постоянного тока, в якорную цепь ко торого включен датчик тока, введены задатчик перемещения, блок задания допустимых потерь в меди, блок деления, блок умножения, блок извлечения корня квадратного, четыре сумматора, а датчик тока выполнен в виде датчика модуля статического тока, причем вход первого квадратера соединен с выходом задатчи са ско -рости, а выход соединен с первым входом блока деления, второй вход которого соединен с задатчиком перемещения, выход блока деления соединен с первым входом блока умножения, второй вход которого соединен с выходом первого сумматора, инверсный вход которого соединен с выходом блока задания допустимых потерь в медии с прямым входом второго сумматора, инверсный вход которого соединен с прямым входом первого сумматора и выходом второго квадратора, вход которого через датчик модуля статического тока соединен с электродвигателем, выход блока умножения- с входом третьего, квадратора.и первым входом третьего сумматора, второй вход которого соединен с выходом блока извлечения корня квадратного, вход которого соединен с вькодом четвертого сумматора, первый вход которого соединен с выходом третьего квадратора, второй вход четвертого сумматора - с вькодом второго сумматора, выход третьего сумматора - с вторым входом задатчика интенсивности. . . На чертеже представлеиа функцио-i нальная схема электропривода подачи металлорежущего станка. Электропривод содержит последовательно соединенные задатчик 1 скорости, задатчик 2 интенсивности, систему 3 управление, преобразователь 4, электродвигатель 5 постоянного тока, датчик 6 модуля статического тока, второй квадратор 7, выход которого соединен с прямым входом первого сумматора 8 и инверсным входом второго сумматора 9, ииверсш и прямой входы которых соответственг но соединены с выходом блока 10 задания допустимых потерь в меди электродвигателя, выход задатчика Iскорости через первый квадратор IIсоединен с первым входом блока 12 деления, второй вход которого соединен с задатчиком 13 перемещения, выход блока 12 деления через блок 14 умножения, третий квадратор 1.5, четвертый сумматор 16 и блок 17 извлечения корня квадратного соединен с вторым входом третьего сумматора 18, первый вход которого соединен с выходом блока 14 умножения, выход первого сумматора 8 соединен с.вторым входом блока 14 умножения, выход второго сумматора 9 - с вторын входом четвёртого сумматора 16, 3 выход третьего сумматора 18 - с вто рым входом задатчика 2 интенсивност Электропривод работает следующим образом. Сигнал с выхода задатчика 1 ско рости, пропорциональный установившейся скорости стола w , через пер вый кйадратор 11 поступает Иа первы вход блока 12 деления с коэффициентом передачи i/2fli, на второй вход которого поступает сигнал с выхода задатчика 13 перемещения, пропорцио нальный заданной длине хода стола L С выхода блока 12 деления образуетей сигнал, пропорциональный L- /2eiw Сигнал с выхода блока 12 деления с коэффициентом 0,5 поступает на первый вход блока 14 Умножения, на второй вход которого поступает сигнал с выхода первого сумматора 8. На инверсный вход первого сумматора 8 с коэффициентом передачи 1/R поступает сигнал с блока 10 з.а дания допустимых потерь в меди, пропорциональный этим потерям 4Р, а ни прямой вход первого сумматора 8 через второй квадратор 7 поступает сигнал от датчика 6 модуля стати ческого тока двигателя, пропорциональный квадрату этого модуля Гс S результате с выхода сумматора В на второй вход блока 14 умножения поступает сигнал, пропорциональный величине гг лР «-T- . а на выходе блока 14 умножения обра зуется сигнал, пропорциональный . тй;; Этот сигнал через третий квадратор 15 поступает на первый вход чет вертого сумматора 16, на второй вход которого поступает сигнал с выхода второго сумматора 9, на прямой вход которого поступает сигнал с выхода блока 10 задания допустимых потерь ДР в меди якоря двигате 34 ля с коэффициентом передачи 1/ofP, а на инверсный вход поступает сигнал, пропорциональный квадрату модуля статического тока I с коэффициентом передачи / tl с выхода второго квадратора 7. . Сигнал на выходе второго сумматора 9 пропорционален величине лР/rfR - . Тогда на выходе четвертого сумматора 16 образуется сигнал, пропо{)ционйльный величине t R /J oLH который через блок 7 извлечения квадратного корня поступает на второй вход третьего сумматора 18, на первый вход которого поступает сигнал с выхода блока 14 умножения. Таким образом, с выхода третьего сумматора 18 на второй вход задатчика 2 интенсивности поступает сигнал, пропорциональный ускорению привода E..f.f + Ъ (11) (г 2 АР) . где а е R - где 1 - передаточное отношение редуктора;R - сопротивление якоряу статический ток; Р - потери в меди-, О - момент генерации электропривода, IH Мц - номинальные ток и момент двигателя. Таким образом, предлагае1« |й элект ропривод обеспечивает максимально возможное ускорение в зависимости от длины хода стола, статического тока и установившейся скорости, за счет чего достигается повышение производительности обработки на станке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод подачи металлорежущего станка | 1987 |
|
SU1647829A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2460110C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2013 |
|
RU2522858C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399080C1 |
| Устройство для управления электроприводом робота | 1988 |
|
SU1553376A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2450300C1 |
| Устройство автоматического контроля прогибов роликов машины непрерывного литья заготовок | 1985 |
|
SU1271641A1 |
| Устройство для управления электроприводом робота | 1989 |
|
SU1664548A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2013 |
|
RU2522857C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2013 |
|
RU2542904C2 |
ЭЛЕКТРОПРИВОД ПОДАЧИ МЕТАЛЛОРЕЖУ1ЦЕГО СТАНКА, содержащий электродвигатель и последовательно соединенные задатчик скорости, задатчик интенсивности, систему управления, преобразователь, выход которого подключен к электродвигателю постоянного тока, в якорную цепь которого включен датчик тока, отличающийся тем, что, с целью увеличения производительности, в него введены задатчик перемещения, Ьлок задания допустимьпс потерь в меди, блок деления, блок умножения, блок извлечения корня квадратного, четыре сумматора, три квадратора, а датчик тока выполнен в виде датчика модуля статического тока, причем вход первого квадратора соединен с выходом задатчика скорости, а выход соединен с первым входом блока деления, второй вход которого соединен с задатчиком перемещения, выход блока деления соединен с первьм входом блока умножения,второй вход которого соединен с выходом первого сумматора, инверсный вход которого соединен с выходом блока задания допустимых потерь в мети и с прямым входом второго сумматора, инверсный вход которого соединен с прямым входом первого cyhMaTopa и выходом второго квадратора, вход которого через датчик модуля статического тока соединен с электродвигателем, выход блока умножения - с входом, третьего квадратора и первым входом третьего сумматора, второй входкоторого соединен с выходом блока извлечения корня квадратного, вход сл ел которого соединен с выходом четвертого сумматора, первый вход KOTOJPOсо го - с выходом третьего квадратора, второй вход четвертого сумматора с выходом второго сумматора, выход третьего сумматора - с вторым входом задатчика интенсивности.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ШТАНГЕН-ЦИРКУЛЬ С ВЫДВИЖНОЮ НОЖКОЮ | 1922 |
|
SU711A1 |
| Руководство по эксплуатахщи | |||
| М., Станкоимпорт | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Лебедев В.Д., Неймарк В.Е | |||
| и др | |||
| Управление вентильными электроприводами постоянного тока | |||
| М., 1970, с | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
