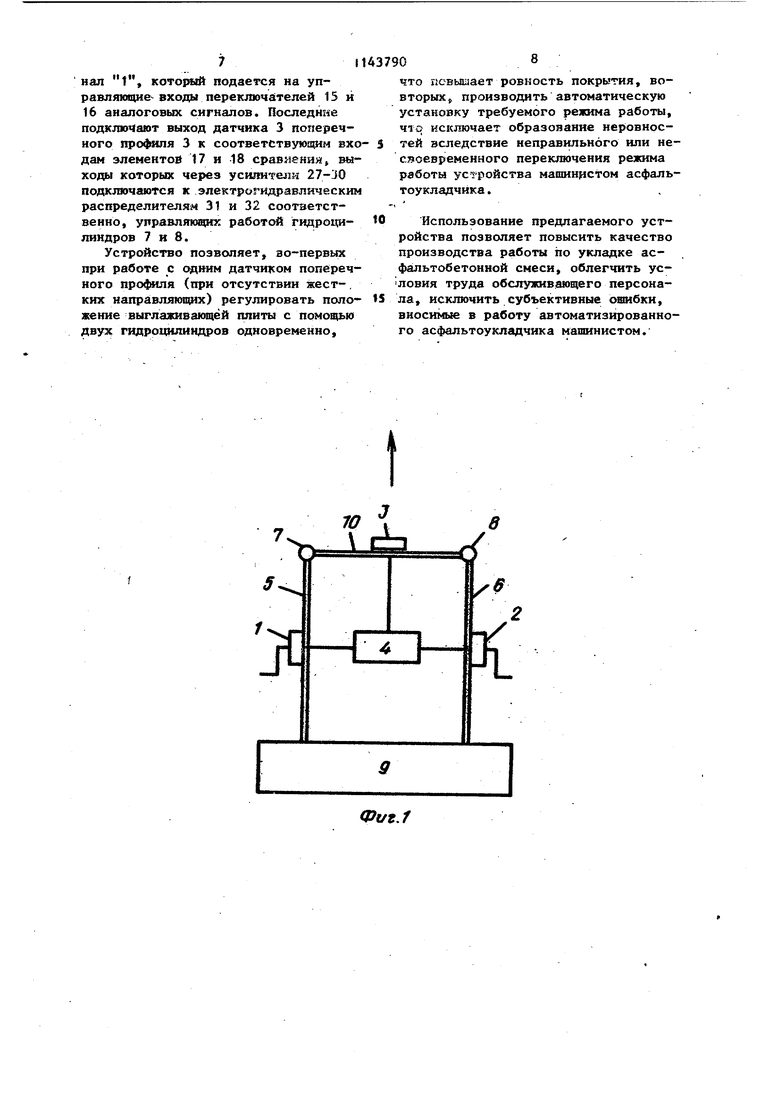
Изобретение относится к автомати ции положения рабочих органов дорож но-строительных машин, а именно к устройствам управления выглаживающе дпитой асфальтоукладчика. Известно устройство автоматического управления положением выглаживающей плиты, содержащее датчики пр дольного и поперечного профиля, бло ки сравнения , усилители и гидроцилинд ры стабилизации выглаживающей плиты Cl3. Недостатком этого устройства явл ется сложность управления им в эксплуатационных условиях. Наиболее близким к изобретению п технической сущности является устро ство для автоматического управления положением выглаживающей плиты асфальтоукладчика, содержащее датчик поперечного профиля, два датчика продольного профиля, два элемента сравнения с задатчиками, первый и второй усилители, которые подключены к соответствующим входам первого электрогидравлического распределителя, третий и четвертый усилители, подключенные к соответствующим входам второго электрогидравлического распределителя, которые соединены через соответствующие гидрс5цш1индры с выглаживающей плитой .2 . Недостатками известного устройст ва являются возможность субьективны ошибок, вносимых машинистом в работу системы автоматики при несвоевременном или неисправном переключении режима работы, что приводит к образованию неровностей укладывае мого слоя асфальтобетонной смеси, а также ограниченность использования возможностей аппаратуры при работе с одним датчиком поперечного профиля, так как в этом случае автоматически регулируется поперечный про4я1пь выглаживающей : плиты только с помощью OAkoro из гидроцилиндров стабилизатора, а другой гидроцилинд управляется вручную. Цель изобретения - повьш1ение точ ности управления. Цель достигается тем, что устройство для автоматического управления , положением выглаживающей плиты ас;фальтоукладчика, содержащее датчик поперечного профиля, два датчика про дольного профиля, два элемента сравнений с задатчиками, первый и второй усилители, которые подключены к соответствующим входам первого электропидравлического распределителя, третий и четвертый усилители, подключенные к соответствующим входам второго электрогидравлйческого распределителя, которые соединены через соответствующие гидроцилиндры с выглаживающей плитой, причем первые выходы датчиков продольного профиля соединены с входом соответствующего элемента сравнения, снабжено двумя датчиками включения, двумя логическими элементами НЕ, двумя переключателями, четырьмя логическими элемен-тами И и двумя логическими элементами ИЛИ, причем второй выход первого датчика продольного профиля подключен через последовательно соединенные первые датчик вклю-чения и элемент НЕ к первому входу первого переключателя, выход которого соединен с входом первого элемента сравнения, выходы которого подключены к входу первого и второго усилителей, второй выход второго датчика продольного профиля подключен к входу второго датчика включения, выход которого подключен к первому входу первого и второго элементов Инк входу второго элемента НЕ, выход которого подключен к первому входу третьего и четвертого элементов И и к первому входу второго переключателя, датчик поперечного профиля соединен с вторым входом переключателей, вчход второго переключателя соединен с входом второго элемента сравнения, первый выход которого подкл:(ючен к второму входу второго и третьего элементов И, второй вьосод элемента сравнения подключен к второму входу первого и четвертого элементов И,, вь-ходы второго и четвертого ;элементов И соединены с соответствующими входами первого элемента. ИЖ, который подключен к входу третьего усилителя, а выходы первого и третьего элементов И соединены с соответ- ствующими входами второго элемента. ИЛИ, выход которого подключен к входу четвертого усилителя, На фиг. 1 изображена схема расположения основных узлов .устройства для управления положением выглаживающей плитыJ на фиг. 2 блок-схема устройства. Устройство для управления положением выглаживающей плиты состоит (фиг.-1) из датчиков 1 и 2 продольного профиля, датчика 3 поперечного профиля, блока 4 управления. Датчики 1 и 2 продольного профиля ус тановлены на тяговых брусьях 5 и 6 соответственно, передние концы тяговых брусьев 5 и 6 соединены со ми гидроцилиндров 7 . и 8, нижние концы тяговых брусьев соединены с выглаживающей плитой;.9. Датчик 3 поперечного профиля установ лен на поперечной раме 10, соединяе мой со штоками гидроцилиндров 7 и 8 Блок управления включает в себя датчики 11 и 12 включения, элементы НЕ 13 и 14, прреключатели 15 и 16 аналоговых сигналов, элементы 17 и 18 сравнения, задатчики 19 и 20, элементы И 21-24, элементы ИЛИ 25 и 26, усилители 27-30, электрогидравлические распределители 31 и 32. Устройство работает следующим образом. Датчик 3 поперечного профиля постоянно подключен к блоку 4 управления (фиг. 1). Режим работы устройства устанавливается автоматически при подключении к блоку 4 управления машинистом асфальтоукладчика соответствующих датчиков 1 и 2 продольного профиля. Блок 4 упраБле ния может работать с числом датчиков не бо лее 2-х и ПОЭТОМУ возможны 4 режима работы: с двумя датчиками 1 и 2 продольного профиля в случае применения двух жестких направляющих; с датчико 1 продольного профиля, и датчиком 3 поперечного профиля при применении жесткой направляющей с левой стороны по ходу движения; с датчиком 2 продольного профиля и датчиком 3 поперечного профиля при применении жесткой направляющей с правой стороны, с датчиком поперечного профиля при отсутствии жестких направляющих. вменение положения в выглаживающей плите 9, т.е. ее угла атаки, осу ществляется гидроидшиндрами 7 и 8, которые через тяговые рамы 5 и 6 связаны с выглаживающей плитой. Поло жение выглаживающей плиты 9 в продольной плоскости регулируется с помощою датчиков 1 и 2 продольного профиля, в поперечной плоскости - с помощью датчика 3 поперечного профиля, т.е. гидроцилиндры 7 и 8 управляются сигналами датчиков 1-3 в зависимости от установленного резшма работы например при работе с двумя датчиками продольного профиля 1 и 2 гидроцилиндр 7 управляется от датчика 1 продольного профиля через блок 4 управления, а гидроцилиндр 8 от датчика 2 продольного профиля. При работе с датчиком 1 продольного профиля и датчиком 3 поперечного профиля гидроцилиндр 7 управляется от датчика 1 продольного профиля, а гидроцилиндр 8 - от датчика 3 поперечного профиля. При работе с датчиком 2 продольного профиля и датчиком 3 поперечного профиля гидроцилиндр 7 управляется от датчика 3 поперечного профиля, а гидроцилиндр 8 от датчика 2 продольного профиля. Следовательно, при различных режимах работы датчик 1 продольного профиля, управляет гидроцилиндром 7, датчик 2 продольного профиля - гидроцилиндром 8, а датчик 3 поперечного профиля - гидроцилиндром 7 или 8 в зависимости от того, в паре с каким датчиком продольного профиля он работает, а также одновременно обоими гидроцилиндрами 7 и 8 при отключении датчиков 1 и 2 продольного профиля. Первый режим работы. К блоку управления 4 подключаются датчики 1 и 2 .продольного профиля. При подключении двух датчиков 1 и 2 продольного профиля сигнал с их выходов подается на вторые входы элементов 17 и 18 сравнения соответственно (фиг.2). Одновременно сигналы 1. с выходов датчиков 11 и 12 включения подают я на входы элементоэ НЕ v13 и 14 и с их выходов сигнал О подается на вторые управляющие входы переключателей 15 и 16, которые отключают сигнал датчика 3 поперечного профиля с входов элементов 17 и 18 сравнения. Сигналы с первых выходов элементов 17 и 18 сравнения подают команду на подъем штоков гидроцилиндров 7 и 8 через усилители 27, 28 и 29,30, электрогйдравлические распределители 31 и 32, а сигналы с вторых выходов элементов 17 и 18 сравнения подают команду на опускание штоков гидроцилиндров 7 и 8. Логические элементы 21-26 предназначены для согласования правильного подключения усилителей 29 и 30 к ) 1 выходам элемента 18 сравнения при изменении режима работы предлагаемого устройства. При подключении датчика 2 продольного профиля с выхода датчика 12 включения сигнал 1 подается на вторые входы логических элементов И 21 и 24, на первые входы которых подается сигнал с выходов элемента 18 сравнения и на выходах элементов 21 и 24 при наличии сигналов на обоих их входах появляется сигнал 1, который через логические элементы ИЛИ 25 и 26 соответственно подается на входы усилителей 29 и30, с т ыходов сигнал подаетсА на входы электро гидравлического распределителя 32, управляющего работой гидроцилиндра 8. Одновременно с выхода элемента НЕ 14 сигнал О подается на вторые входы логических элементов И 22 и 23 на первые входы которых подается сиг ал с выходов элемента 18 сравнения При наличии на вторых входах логичес ких элементов И 22 и 23 сигнала О на их выходах отсутствусигналВторой режим рабЬты. К блоку управления 4 (фиг. 1) подключается да чик 1 продольного профиля, датчик 2продольного профиля отключается. Сигнал с выхода датчика 1 продольно го профиля подается на вход элемент 17сравнения, с выходов которого сигнал черей усилители 27 и 28 пода ется на-входы делителя 31. Одновременно на выходе датчика 11 включени появляется сигнал 1 и подается на вход элемента НЕ 13, на выходе кото рого появляется сигнал О, который подается на управляющий вход переключателя 15 аналоговых сигналов. Последний отключает сигнал датчика 3поперечного профиля с входа элемента 17 сравнения. При отключении датчика 2 продольного профиля на вы ходе датчика 12 включения появляетс сигнал О, на выходе элемента НЕ 1 сигнал 1, на управляющем входе переключателя 16 аналоговых сигнало появляется сигнал 1 и переключате 16 соединяет выход датчика 3 поперечного профиля с входом элемента 18сравнения. Одновременно с выхода датчика 12 включения сигнал О подается на вторые входы логических элементов И 21 и 24, а сигнал 1 с выхода элемента НЕ 14 подается на вторые входы логических элементов И, 22 li Т1ри наличии на вторых вхо- дах элементов И 22 и 23 сигнала 1 на их выходе появляется сигнал с выходов элемента 18 сравне1{ия. Сигнал с первого выхода элемента 18 сравнения через элемент И 23 и элемент ИЛИ 26 подается на усилитель 30,подающий команду электрогидравлическому распределителю 32 на опускание штока гидропилиндра 8. Сигнал со второго выхода элемента 18 сравнения через логический -элемент И 22 и элемент ИЛИ 25 подается на вход усилителя 29, подающего команду электрогидравлическому распределителю 32 на подъем штока гидроцилиндра 8. Третий режим работы. К блоку 4 управления подключается датчик 2 продольного профиля, датчик 1 продольного профиля отключается. Сигнал с датчика 2 продольного профиля подается на вход элемента 18 сравнения, на выходе датчика 12 включения появляется сигнал 1, на выходе элемента НЕ 14 появляется сигнал О и переключатель 16 аналоговых сигналов отключает выход датчика 3 поперечного профиля от входа элемента 18 сравненрш. Сигналы с выхода элемента 18 сравнения через логические элементы И 21-24 и элементы ИЛИ 25 и 26 подаются на входы усилителей 29 и 30, выходы которых соединены с входами электрогидравлического распределителя 32, управляющего работой гидроцилиндра 8. При отключении датчика 1 продольного профиля на выходе датчика 11 включения появляется сигнал О а на выходе элемента НЕ 13 - сигнал 1, который подается на управляющий вход переключателя 15 аналоговых сигналов. Последний соедиряет выход датчика 3 поперечного профиля с входом элемента 17 сравнения. Сигналы с выходов элемента 17 подаются на входы усилителей 27 и 28, которые соединены с входами электрогидравлического распределителя 31,управля1ощего работой гидроцилиндра 7. Четвертый режим работы. Датчики 1 и 2 продольного профиля отключаются от блока управления. При отключении датчиков 1 и 2 продольного профиля на выходах датчиков 11 и 12 включения появляется сигнал О, на выходах элементов НЕ 13 и 14 - сиг71нал t, которвй подается на управляющие- входы переключ 1телей 15 и 16 аналоговых сигналов. Последние подключают выход датчика 3 поперечного профиля 3 к соответствующим вхо дам элементов 17 и 18 сравнения выходы которых через усилители подключаются к электрогидравлическим распределителям 31 и 32 соответственно, управляющих работой гидроцилиндров 7 и 8. Устройство позволяет, во-первых при работе с одним датчиком поперечного (при отсутствии жест-, ких направляющих) регулировать положение выглаживающей плиты с помощью двух гидроцилиндров одновременно. 0 что повышает ровность покрытия, вовторых, производить автоматическую установку требуемого режима работы, что исключает образование неровностей вследствие неправильного или несзоеврененного переключения режима работы устройства машинистом асфальтоукладчика . Использование предлагаемого устройства позволяет повысить качество производства работы по укладке асфальтобетонной смеси, облегчить условия труда обслуживающего персонала, исключить субъективные ошибки, вносимые в работу автоматизированного асфальтоукладчика машинистом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления рабочим процессом асфальтоукладчика | 1987 |
|
SU1491930A1 |
| Система управления рабочим процессом асфальтоукладчика | 1989 |
|
SU1694766A1 |
| Система автоматического поддержания уровня материала в шнековой камере асфальтоукладчика | 1982 |
|
SU1102831A1 |
| Устройство для управления поддержания уровня материала в шнековой камере асфальтоукладчика | 1984 |
|
SU1219701A1 |
| Асфальтоукладчик | 1992 |
|
SU1838500A3 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ПАРАМЕТРАМИ РАБОЧЕГО РЕЖИМА СТРОИТЕЛЬНО-ДОРОЖНЫХ МАШИН С ГИДРОСИСТЕМОЙ | 1992 |
|
RU2049844C1 |
| Устройство для укладки асфальта и нанесения разметки автодороги | 2022 |
|
RU2790915C1 |
| Стенд для испытания блока цилиндров двигателя внутреннего сгорания на усталость | 1984 |
|
SU1268985A1 |
| Многоканальный электрогидравлический следящий привод | 1990 |
|
SU1753064A1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2631974C2 |
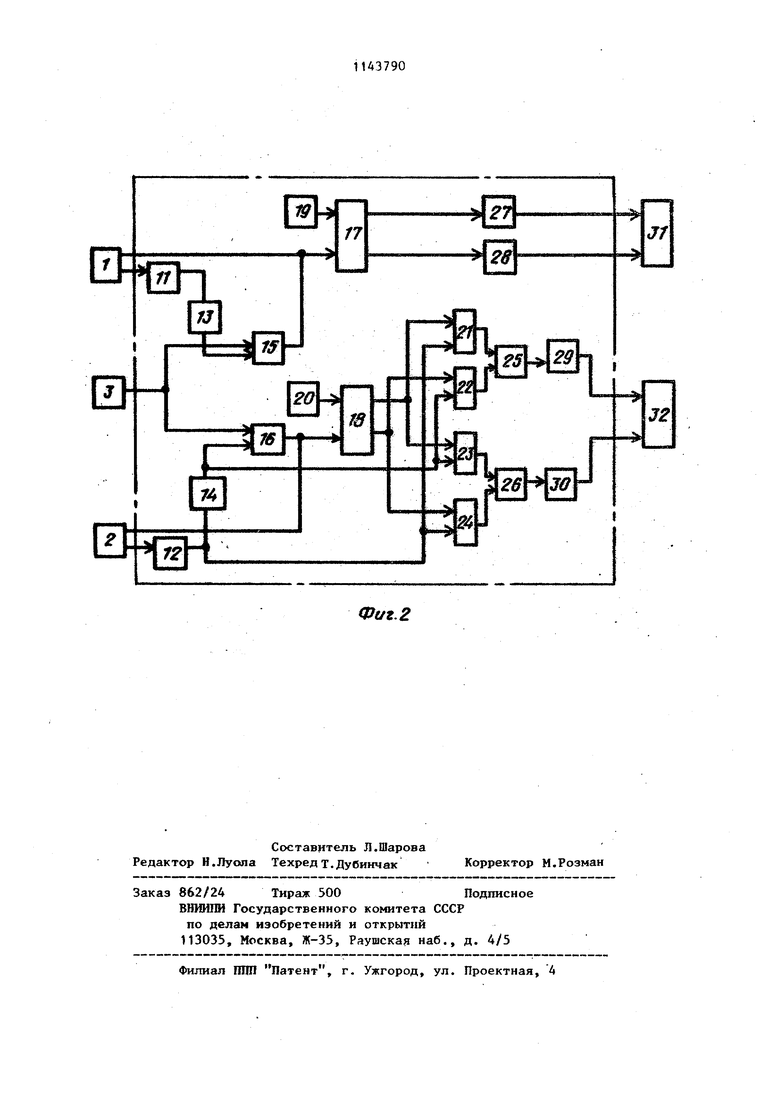
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ВЫГЛАЖИВАЩЕЙ ПЛИТЫ АСФАЛЬТОУКЛАДЧИКА, содержащее поперечного профиля, два датчика продольного профиля, два элемента сравнения с задатчиками, первый и второй усилители, которые подключены к соответствуюЕЦИм входам первого электрогидравлического распределителя, третий и четвертый усилители, подключенные к соответствующим входам второго электрогидравлического распределителя, которые соединены через соответствующие гид- роцилиндры с выглаживающей плитой, причем первые выходы датчиков про дольного профиля соединены с входом соответствующего элемента сравнения, отлича.ющееся тем, ЧТО; с целью повышения точности управления, оно снабжено двумя датчиками включения, двумя логическими элементами НЕ, двумя переключателями, четырьмя логическш-ш элементами И и двумя логическими элементами ИЛИ, причем второй выход первого датчика продольного профиля подключен через последовательно соединенные первые датчик, включения и элемент НЕ к первому входу первого переключателя, выход которого соединен с входом первого элемента сравнения, выходы которого подключены к входу первого и второго усилителей, второй выход второго датчика продольного проф1шя подключен к входу второго датчика включения, выход которого подключен к первому входу первого и второго элементов И и к входу второго элемента НЕ, выход которого подключен к первому входу третьего и четсл вертого элементов И и к первому входу второго переключателя, датчик поперечного профиля соединен с вторым входом переключателей, выход второго переключателя соединен с входом второго элемента сравнения, первый выход которого подключен к второму входу второго и третьего элементов И, второй выход элемента сравнения подключен к второму входу :о первого и четвертого элементов И, выходы второго и четвертого элементов И соединены с соответствующими входами йервого элемента ИЛИ, который подключен к входу третьего усилителя, а выходы первого и третьего элементов И соединены с соответствующими входами второго элемента ИЛИ, выход которого подключен к входу чет- вертого усилителя.
jC
Фиг.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3872601, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Скловский А.А | |||
| Автоматизация дорожных машин | |||
| Рига, Авотс, 1980, с | |||
| Камневыбирательная машина | 1921 |
|
SU222A1 |
