JL
ИНшИШ
Фкг.1
Изобретение относится к строительному и дорожному машиностроению, в частности к средствам автоматизации управления процессами возведения асфальтобетонных дорожных покрытий.
Цель изобретения - повышение качества возводимого покрытия.
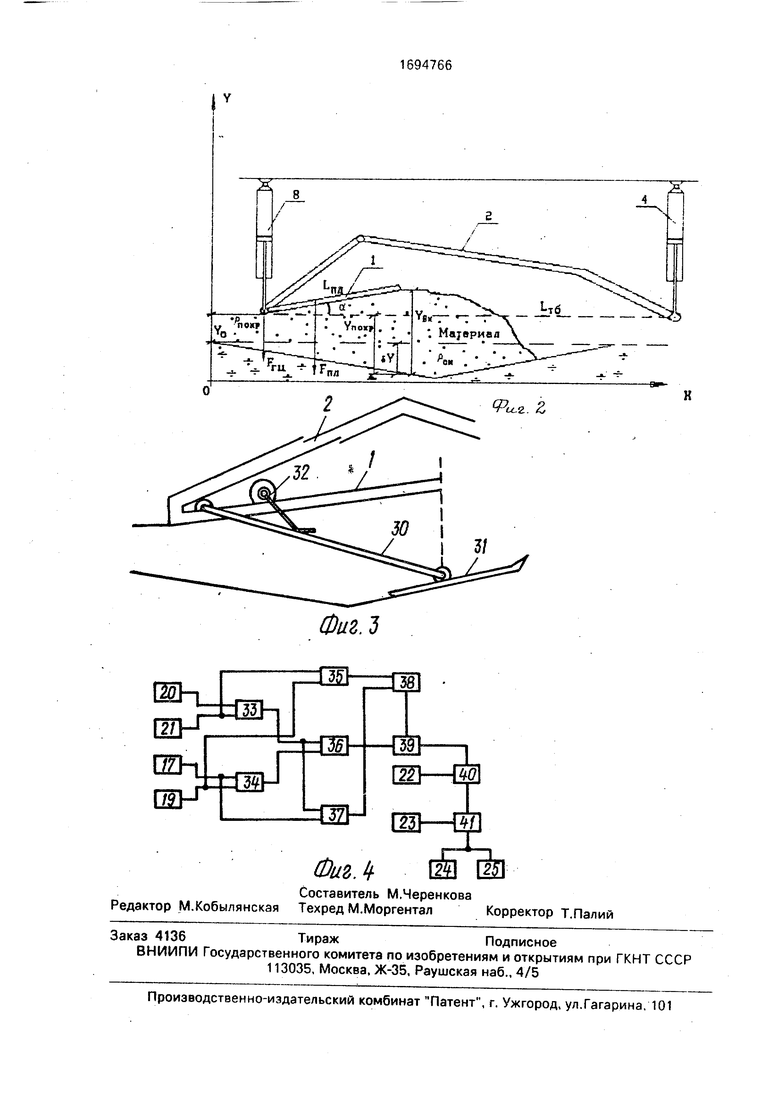
На фиг. 1 изображена схема системы управления укладкой асфальта; на фиг. 2 - геометрическая схема деформации слоя укладываемого материала выглаживающей плитой асфальтоукладчика; на фиг. 3 - схема измерителя неровностей дорожного основания дороги; на фиг. 4 - структурная схема вычислительного блока системы.
Система управления рабочим процессом асфальтоукладчика с выглаживающей плитой 1 и тяговыми брусьями 2 и 3 содержит переднюю пару гидроцилиндров 4 и 5 с электрозолотниками 6 и 7, связывающих раму асфальтоукладчика с шарнирами тяговых брусьев 2 и 3, и заднюю пару гидроцилиндров 8 и 9, соединяющих раму асфальтоукладчика с задней частью выглаживающей плиты 1, задатчик 10 номинальной толщины покрытия, а также измеритель 11 неровностей возводимого покрытия, связанный с копирным устройством 12 и выглаживающей плитой 1. Выход измерителя 11 подключен через первый компаратор 13 к первому электрозолотнику 6 передней пары г идроцилиндров 4 и 5. На плите 1 закреплен датчик 14 поперечного уклона, связанный через второй компаратор 15, к которому подключен задатчик 16 поперечного уклона, с вторым электрозолотником 7 передней пары гидроцилидров 4 и 5. С задней частью плиты 1 шарнирно связан измеритель 17 неровностей дорожного основания, подключенный к вычислительному блоку 18, соединенному с задатчиком 19 номинальной толщины покрытия задатчиком 20 плотности асфальтобетонной смеси, задатчиком 21 требуемой плотности покрытия, задатчиком 22 коэффициента необратимой пластической деформации материала смеси и задатчиком 23 отношения площадей выглаживающей плиты и поршней задней пары гидроцилиндров, выход которого параллельно через усилители 24 и 25 мощности и управляющие электромагниты 26 и 27 связан с редукционными клапанами 28 и 29 задней пары гидроцилиндров 8 и 9.
При этом йз меритель 17 неровностей дорожного основания выполнен в виде шарнирно связанной с задней частью выглаживающей плиты 1 жесткой консоли 30, свободно, например с помощью колеса 31 (или лыжи), опирающейся на дорожное основание под передней кромкой плиты 1, и
датчика 32 угла поворота консоли в шарнире относительно заданного положения, в частности потенциометра типа П-1.
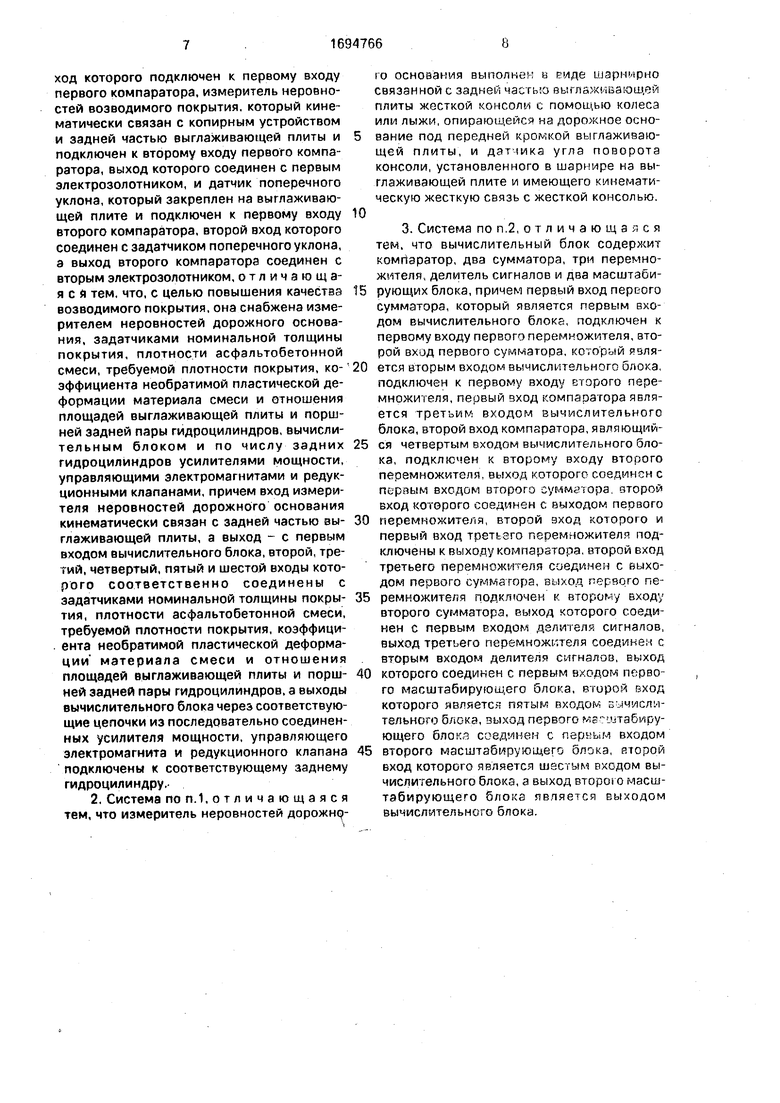
Вычислительный блок 18 содержит компаратор 33, сумматор 34, перемножители 35-37, сумматор 38, делитель 39 сигналов и масштабирующие блоки 40 и 41.
Система работает следующим образом. В случае движения асфальтоукладчика
по ровному основанию при укладке покрытия заданной толщины слой смеси YBx, поступающий под переднюю кромку плиты, сминается пропорционально коэффициенту Ј относительной деформации, зависящему
5 от силового воздействия Рпл массы плиты на смесь
Рпл(1)
е
пл
П
см
где 5пл - площадь рабочей поверхности выглаживающей плиты;
Рпл т силовое воздействие массы выглаживающей плиты;
Псм - коэффициент необратимой пла- стической деформации материала смеси.
При этом рабочая поверхность выглаживающей плиты ориентируется в пространстве под равновесным углом «равн атаки, определяемым с учетом геомет- рического понятия коэффициента относительной деформации
35
„ ... YBX YQ Епл ССравн.
YBXYO + пл (Хравн
(2)
где Yo - требуемая толщина слоя;
Inn - размер выглаживающей плоскости плиты вдоль движения машины (продольный размер или длина плиты) как
;-
И1Л
пл
Пс
5пл - FI
пл
,(3)
зависящим не только от свойств смеси, определяемых коэффициентом ПСм, необходимой пластической деформации и конструктивных параметров РПл. 5Пл, но и от толщины покрытия под задней кромкой пли- ты. В случае ровного основания, когда Ynoxp Yo const, равновесный угол атаки не изменяется, при этом плотность покрытия Аюкр. равна требуемой/Эф и через равновесный угол и толщину слоя определяется выражением
. л- - ( Оравн И1Л + YQ ) /Осм
Yo
гдеры - плотность асфальтобетонной смеси.
/Эпокр. - -
,(4)
При наезде ходовой части асфальтоукладчика на препятствие или во впадину в основании (неровность д Y), шарниры тяговых брусьев 2 и 3 совместно с рамой и гидроцилиндрами вынуждены перемещаться в вертикальной плоскости, нарушая сложившееся на плите 1 равновесие сил и изменяя тем самым ее угол атаки.
Плита 1 стремится изменить свое высотное положение (начинает тонуть или всплывать), однако сигнал, снимаемый с измерителя 11 неровностей возводимого покрытия и передаваемый через компаратор 13, включает электрозолотник 6 гидроцилиндра 4, заставляет шарнир тягового бруса 2 вернуться в заданное копиром 12 положение, сохранив угол атаки плиты вблизи Оравн. этого кра плиты. Поперечный угол наклона плиты 1, появившийся при этом, фиксируется датчиком 14 поперечного уклона, выходной сигнал которого поступает через элемент 15 сравнения на электрозолотник 7 гидроцилиндра 5, Шток последнего под действием давления масла перемещает шарнир тягового бруса 3 до уровня, занимаемого шарниром тягового бруса 2. Таким образом, первоначально равновесный угол огравн. сохраняется по всей ширине плиты 1, сохраняется равновесие сил, действующих на плиту 1, и ее заданное положение в пространстве.
Однако вследствие наличия неровностей 5 Уоснования, плотность возводимого покрытия, определяемая как
2равн.
/Эпокр
Гпл +/о + 6 Y Yo
в этом случае не сохраняется постоянной и не равна заданной ртр.
Для поддержания заданной величины РПОКР в системе осуществляется управление равновесным углом Оравн. посредством изменения силового воздействия массы плиты на смесь. Связь между требуемым силовым воздействием Рпл.треб, величиной неровности д У и требуемой величиной плотности покрытия рпокр находят на основании выражений (3) и (5) как
Рпл.треб - Г 1см Зпл
(Yo+dv) -(АР-AM)
Yo ртр + 5 Y (ртр. -рем )
(6)
Это обеспечивается тем, что при подходе измерителя 17 неровностей дорожного основания к препятствию сигнал с него, пропорциональный величине неровности основания, подается на вычислительный
блок 18, куда поступают и сигналы с задат- чиков 19-23. На основании зависимости рассчитывается величина требуемого силового воздействия массы плиты на смесь и соот- ветствующего корректирующего усилия РГц со стороны задних гидроцилиндров как
Ргц Рпл.треб - Pi
пл
(7)
или с учетом общей площади Sf поршней двух задних гидроцилиндров требуемое давление жидкости в их нагнетающих полостях
Frp Ргц/Sf.
Коэффициент масштаба К, устанавливаемый с задатчика 23, представляет собой при этом отношение площади выглаживающей плиты Snn и общей площади Sf поршней
двух задних гидроцилиндров асфальтоукладчика
K S™/Sf.
Сформированный в вычислительном
блоке 18 сигнал подается на электронные усилители 24 и 25. Усиленные сигналы с помощью пропорциональных магнитов 26 и 27 управляют посредством редукционных клапанов 28 и 29 давлением в поршневых
полостях гидроцилиндров 8 и 9 прямо пропорционально поданному сигналу РТр. Суммарная сила (Рпл + Ргц), действующая на материал со стороны плиты 1, увеличивается (или уменьшается) по отношению к Рпл и
равновесие сил нарушается. Плита 1 вновь стремится занять более низкое положение, но за счет гидроцилиндров 4 и 5 высотное положение шарниров тяговых брусьев 2 и 3 становится выше, равновесный угол
Оравн. увеличивается и изменяется сила реакции материала на плиту 1 до равновесного состояния. При этом высотное положение задней кромки плиты 1 не изменяется, а плотность асфальтобетонной смеси сохраняется равной/9тр заданной величине. В результате обеспечивается ровность поверхности и повышается долговечность покрытия.
Формула изобретения
1. Система управления рабочим процессом асфальтоукладчика с выглаживающей плитой и тяговыми брусьями, содержащая переднюю пару гидроцилиндров с электрозолотниками, связывающими раму асфальтоукладчика с шарнирами тяговых брусьев, и заднюю пару гидроцилиндров, связывающих раму асфальтоукладчика с задней частью выглаживающей плиты, два компаратора, задатчик толщины покрытия, выход которого подключен к первому входу первого компаратора, измеритель неровностей возводимого покрытия, который кинематически связан с копирным устройством и задней частью выглаживающей плиты и подключен к второму входу первого компаратора, выход которого соединен с первым электрозолотником, и датчик поперечного уклона, который закреплен на выглаживающей плите и подключен к первому входу второго компаратора, второй вход которого соединен с задатчиком поперечного уклона, а выход второго компаратора соединен с вторым электрозолотником, отличающаяся тем, что, с целью повышения качества возводимого покрытия, она снабжена измерителем неровностей дорожного основания, задатчиками номинальной толщины покрытия, плотности асфальтобетонной смеси, требуемой плотности покрытия, ко- эффициента необратимой пластической деформации материала смеси и отношения площадей выглаживающей плиты и поршней задней пары гидроцилиндров, вычисли- тельным блоком и по числу задних гидроцилиндров усилителями мощности, управляющими электромагнитами и редукционными клапанами, причем вход измерителя неровностей дорожного основания кинематически связан с задней частью выглаживающей плиты, а выход - с первым входом вычислительного блока, второй, третий, четвертый, пятый и шестой входы которого соответственно соединены с задатчиками номинальной толщины покрытия, плотности асфальтобетонной смеси, требуемой плотности покрытия, коэффици- . ента необратимой пластической деформации материала смеси и отношения площадей выглаживающей плиты и поршней задней пары гидроцилиндров, а выходы вычислительного блока через соответствующие цепочки из последовательно соединенных усилителя мощности, управляющего электромагнита и редукционного клапана подключены к соответствующему заднему гидроцилиндру..
2. Система по п. 1,отличающаяся тем, что измеритель неровностей дорожного основания выполнен в виде шарнмрно связанной с задней частью выглаживающей плиты жесткой консоли с помощью колеса или лыжи, опирающейся на дорожное основание под передней кромкой выглаживающей плиты, и датшка угла поворота консоли, установленного в шарнире на выглаживающей плите и имеющего кинематическую жесткую связь с жесткой консолью.
3. Система по п.2, отличающаяся тем, что вычислительный блок содержит компаратор, два сумматора, три перемножителя, делитель сигналов и два масштабирующих блока, причем первый вход переого сумматора, который является первым входом вычислительного блока, подключен к первому входу первого перемножителя, второй вход первого сумматора, который РЗЛЯется вторым входом вычислительного блока, подключен к первому входу второго перемножителя, первый вход компаратора является третьим входом вычислительного блока, второй вход компаратора, являющийся четвертым входом вычислительного блока, подключен к второму входу второго перемножителя, выход которого соединен с пораым входом второго второй вход которого соединен с выходом первого
перемножителя, второй зход которого и первый вход третьэго перемножителя подключены к выходу компаратора, второй вход третьего перемножителя соединен с выходом первого сумматора, выход первого перемножителя подключен к второму входу второго сумматора, выход которого соединен с первым входом делителя сигналов, выход третьего перемножктеля соединен с вторым входом делителя сигналов, выход
которого соединен с первым входом первого масштабирующего блока, второй вход которого является пятым входом вычислительного блока, выход первого ме- ллгабиру- ющего блокя соединен с перным входом
второго масштабирующего блока, второй вход которого является шестым входом вычислительного блока, а выход второ о масштабирующего блока является выходом вычислительного блока.
Фиг Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления рабочим процессом асфальтоукладчика | 1987 |
|
SU1491930A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ПАРАМЕТРАМИ РАБОЧЕГО РЕЖИМА СТРОИТЕЛЬНО-ДОРОЖНЫХ МАШИН С ГИДРОСИСТЕМОЙ | 1992 |
|
RU2049844C1 |
| Устройство для автоматического управления положением выглаживающей плиты асфальтоукладчика | 1983 |
|
SU1143790A1 |
| УПЛОТНЯЮЩИЙ РАБОЧИЙ ОРГАН АСФАЛЬТОУКЛАДЧИКА | 2002 |
|
RU2225911C1 |
| УКЛАДЧИК ДОРОЖНО-СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ | 1993 |
|
RU2076167C1 |
| КОЛЬЦЕВАЯ МАГИСТРАЛЬ МЕГАПОЛИСА И СПОСОБ РЕКОНСТРУКЦИИ КОЛЬЦЕВОЙ МАГИСТРАЛИ МЕГАПОЛИСА | 1998 |
|
RU2135672C1 |
| Асфальтоукладчик | 1992 |
|
SU1838500A3 |
| УПЛОТНЯЮЩИЙ РАБОЧИЙ ОРГАН АСФАЛЬТОУКЛАДЧИКА | 1995 |
|
RU2078869C1 |
| Рабочий орган асфальтоукладчика | 1987 |
|
SU1446203A1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ТРАНСПОРТНОЙ МАГИСТРАЛИ МЕГАПОЛИСА | 1998 |
|
RU2140479C1 |
Изобретение относится к строительству и дорожному машиностроению, в частности к средствам автоматизации управления процессами возведения асфальтобетонных дорожных покрытий, позволяет повысить качество возводимого покрытия. Система 6 Е а содержит выглаживающую плиту 1, тяговые брусья 2 и 3, переднюю пару гидроцилиндров 4 и 5 с электрозолотниками 6 и 7. заднюю пару гидроцилиндров 8 и 9, задатчик 10 номинальной толщины покрытия, измеритель 11 неровностей возводимого покрытия, копирное устройство 12, компаратор 13, датчик 14 поперечного уклона, компаратор 15, задатчик 16 поперечного уклона, измеритель 17 неровностей дорожного основания, вычислительный блок 18, задатчик 19 номинальной толщины покрытия, задатчик 20 плотности асфальтобетонной смеси, задатчик 21 требуемой плотности покрытия, зэдатчик 22 коэффициента необратимой пластической деформации материала смеси, задатчик 23 отношения площадей выглаживающей плиты и поршней задней пары гидроцилиндров, усилители 24 и 25 мощности, управляющие электромагниты 26 и 27, редукционные клапаны 28 и 29.2 з.п. ф-лы, 4 ил. (Л с Д С ю Јь VI о о 
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
