4ib
;о со
со
31491930
эадатчик 19 толщины возводимого пок- масштабирующий блок 22, элемент 23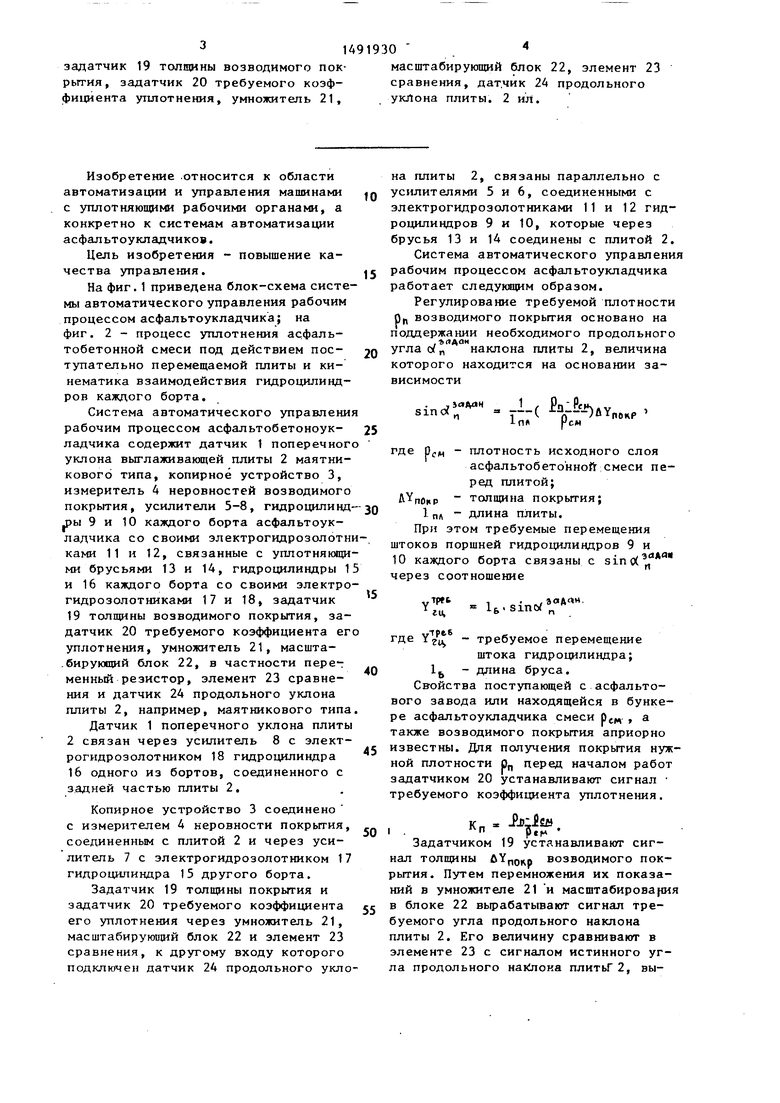
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления рабочим процессом асфальтоукладчика | 1989 |
|
SU1694766A1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ТРАНСПОРТНОЙ МАГИСТРАЛИ МЕГАПОЛИСА | 1998 |
|
RU2140479C1 |
| КОЛЬЦЕВАЯ МАГИСТРАЛЬ МЕГАПОЛИСА И СПОСОБ РЕКОНСТРУКЦИИ КОЛЬЦЕВОЙ МАГИСТРАЛИ МЕГАПОЛИСА | 1998 |
|
RU2135672C1 |
| АВТОМОБИЛЬНАЯ ДОРОГА И СПОСОБ ЭКСПЛУАТАЦИИ АВТОМОБИЛЬНОЙ ДОРОГИ С ЕЕ РЕМОНТОМ И РЕКОНСТРУКЦИЕЙ | 1998 |
|
RU2135671C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ПАРАМЕТРАМИ РАБОЧЕГО РЕЖИМА СТРОИТЕЛЬНО-ДОРОЖНЫХ МАШИН С ГИДРОСИСТЕМОЙ | 1992 |
|
RU2049844C1 |
| Устройство для автоматического управления положением выглаживающей плиты асфальтоукладчика | 1983 |
|
SU1143790A1 |
| Устройство для укладки асфальта и нанесения разметки автодороги | 2022 |
|
RU2790915C1 |
| Нейросетевая система автоматического управления уплотнением дорожных материалов асфальтоукладчиками | 2021 |
|
RU2788338C2 |
| Устройство для уплотнения дорожно-строительных термопластичных материалов | 1983 |
|
SU1307005A1 |
| Рабочий орган асфальтоукладчика | 1991 |
|
SU1827404A1 |
Изобретение относится к системам автоматизации асфальтоукладчиков, может найти применение в машиностроении с уплотняющими рабочими органами и позволяет повысить точность управления. Система содержит датчик 1 поперечного уклона выглаживающей плиты 2, копирное устройство 3, измеритель 4 неровностей возводимого покрытия, усилители 5-8, гидроцилиндры 9 и 10 с электрогидрозолотниками 11 и 12, гидроцилиндры 15 и 16 с электрогидрозолотниками 17 и 18, задатчик 19 толщины возводимого покрытия, задатчик 20 требуемого коэффициента уплотнения, умножитель 21, масштабирующий блок 22, элемент 23 сравнения, датчик 24 продольного уклона плиты. 2 ил.
рытия, задатчик 20 требуемого коэффициента уплотнения, умножитель 21,
Изобретение .относится к области автоматизации и управления машинами с уплотняющими рабочими органами, а конкретно к системам автоматизации асфальтоукладчиков.
Цель изобретения - повышение качества управления.
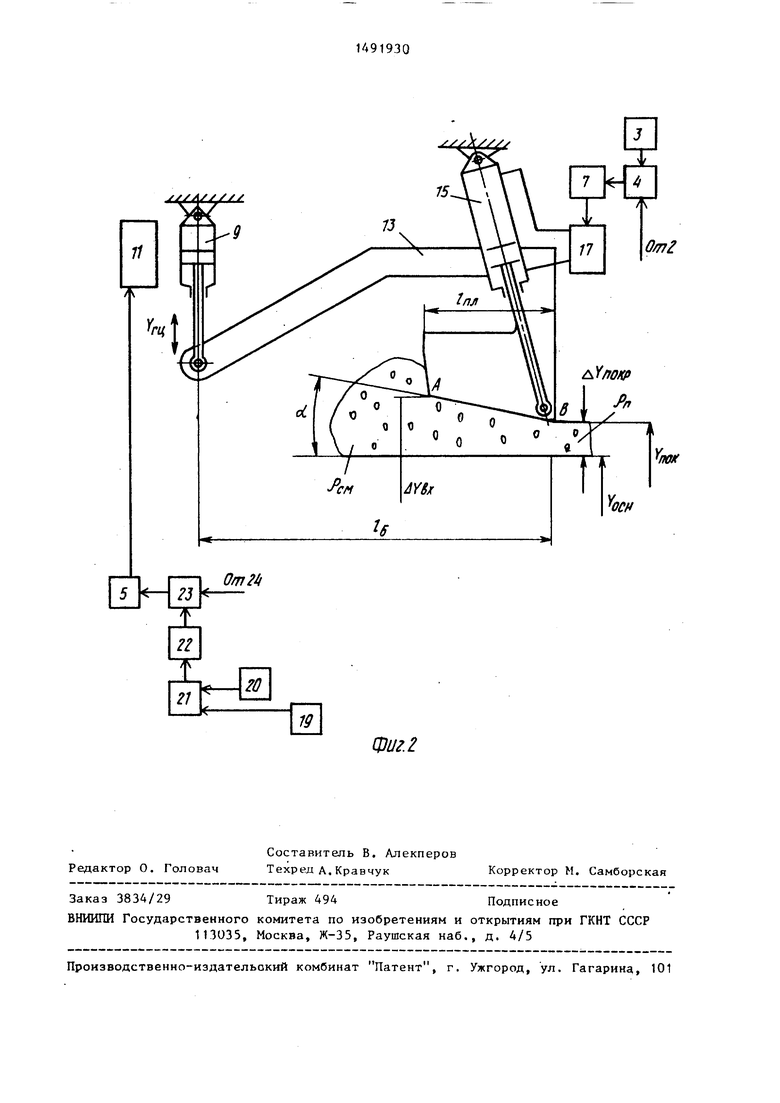
На фиг. 1 приведена блок-схема системы автоматического управления рабочим процессом асфальтоукладчика; на фиг. 2 - процесс уплотнения асфальтобетонной смеси под действием поступательно перемещаемой плиты и кинематика взаимодействия гидроцилиндров каждого борта.
Система автоматического управления рабочим процессом асфальтобетоноук- ладчика содержит датчик 1 поперечного уклона выглаживающей плиты 2 маятникового типа, копирное устройство 3, измеритель 4 неровностей возводимого покрытия, усилители 5-8, гидроцилинд- -ры 9 и 10 каждого борта асфальтоукладчика со своими электрогидрозолотни ками 11 и 12, связанные с уплотняющими брусьями 13 и 14, гидроцилиндры 15 и 16 каждого борта со своими злектро- гидрозолотниками 17 и 18 задатчик 19 толщины возводимого покрытия, задатчик 20 требуемого коэффициента его уплотнения, умножитель 21, масшта- .бирующий блок 22, в частности переменный резистор, элемент 23 сравнения и датчик 24 продольного уклона плиты 2, например, маятникового типа
Датчик 1 поперечного уклона плиты 2 связан через усилитель 8 с элект- рогидрозолотником 18 гидроцилиндра 16 одного из бортов, соединенного с задней частью плиты 2.
Копирное устройство 3 соединено с измерителем 4 неровности покрытия, соединенным с плитой 2 и через усилитель 7 с электрогидрозолотником 17 гидроцилиндра 15 другого борта,
Задатчик 19 толщины покрытия и задатчик 20 требуемого коэффициента его уплотнения через умножитель 21, масштабируюп1ий блок 22 и элемент 23 сравнения, к другому входу которого подключен датчик 24 продольного уклосравнения, дат.чик 24 продольного уклона плиты. 2 иЛ.
на плиты 2, связаны параллельно с усилителями 5 и 6, соединенными с электрогидрозолотниками 11 и 12 гидроцилиндров 9 и 10, которые через брусья 13 и 14 соединены с плитой 2.
Система автоматического управления рабочим процессом асфальтоукладчика работает следующим образом.
Регулирование требуемой плотности р возводимого покрьп-ия основано на поддержании необходимого продольного
«ядои„
угла d „ наклона плиты 2, величина которого находится на основании зависимости
25
, -1-( in кем
покР
0
5
0
5
0
5
где Qfn - плотность исходного слоя
асфальтобетонной;смеси перед плитой; толщина покрытия;
1 пл длина плиты. При этом требуемые перемещения штоков поршней гидроцилиндров 9 и 10 каждого борта связаны с sin оС через соотношение
u-sinc/r:
где - требуемое перемещение
штока гидроцилиндра; 1 - длина бруса. Свойства поступающей с асфальтового завода или находящейся в бункере асфальтоукладчика смеси , а также возводимого покрытия априорно известны. Для получения покрытия нужной плотности р„ перед началом работ задатчиком 20 устанавливают сигнал требуемого коэффициента уплотнения.
К„ :. JblJsfi I ..и
Задатчиком 19 устанавливают сигнал толщины CiYpQi p возводимого покрытия. Путем перемножения их показаний в умножителе 21 °и масштабирова шя в блоке 22 вырабатывают сигнал требуемого угла продольного наклона плиты 2. Его величину сравнивают в элементе 23 с сигнгшом истинного угла продольного HaiOioHa плитьГ2, вырабатываемым датчиком 24. Результат их сравнения в усилителях 5 и 6 усиивают и преобраэунуг в перемещение золотников гидроцилиндров 9 и 10 кажого борта, связанных через брусья 13 и 14 с плитой 2 и корректирующих ее продольное угловое положение до совпадения угла о( наклона плиты к плоскости покрытия с требуемой веичиной « AQH.
При этом высотное положение задней кромки плиты 2 стабилизируют по отклонению сигнала oY Yj - YHQHP измерителя 4 неровности, где Y,o - заданное копирным устройством 3 зна- чение координаты покрытия. Этот сигнал преобразуют усилителем 7 в перемещение, например, золотника гидро- цилиндра 15 одного из бортов и удерживающего заднюю кромку плиты 2 в заданной плоскости. При возникновении поперечного наклона плиты 2 его угловую величину«„ измеряют датчиком 1, преобразуют в усилителе 8 в перемещение золотника гидроцилиндра 16 другого борта, также связанного с ее задней кромкой, и возвращают плиту 2 в заданное положение Тпл Предлагаемая система автоматического управления позволяет осуществлять одновременную регулировку ровности возводимого покрытия и его требуемой плотности, причем одинаковой по длине покрытия.
Полученная одинаковая плотность по длине покрытия предотвращает искажение ровности покрытия при его укатке катками и повьшает долговечность дорожного покрытия.
Кроме того, предлагаемая система озволяет увеличить на (10-15%) прозводительность асфальтоукладчика а счет того, что она лучше стабилиирует процесс укладки смеси и дает возможность
скорость.
Формула
повысить минимальную
5
0
изобретения Система автоматического управления рабочим процессом асфальтоукладчика с выглаживающей плитой и- уплотняющими брусьями, содержащая первую пару гидроцилиндров с электрогидрозолотни0 ками, соединяющих раму, асфальтоукладчика с задней частью выглаживающей плиты и вторую пару гидроцилиндров с электрогидрозолотниками, соединяющих раму асфальтоукладчика с шарни- рами уплотняющих брусьев, отличающаяся тем, что, с целью повышения качества управления, она снабжена копирным устройством,датчиками поперечного и продольного уклона плиты, измерителем неровностей возводимого покрытия, четьфьмя усилителями, задатчиками толщины покры- тия и требуемого коэффициента его уплотнения, умножителем,масштабиру5 ющим блоком и элементом сравнения, причем копирное устройство и выглаживающая плита кинематически соединены с измерителем неровностей возводимого покрытия, подключенным через первый усилитель с первым электрогидр о зол от ни к ом первой пары гидроцилиндров, датчик поперечного уклона плиты через второй усилитель соединен с вторым электрогидрозолотником пары гидроцилиндров, задат- чики толщины покрытия и требуемого коэффициента его уплотнения подключены к соответствующим входам умножителя, выход которого через масштабирующий блок соединен с первым входом элемента сравнения, второй вход которого соединен с датчиком продольного уклона плиты, выходы элемента сравнения через третий и четвертый усилители соединены соответственно с первым и вторым электрогидрозолотниками второй 1тары гидроцилиндров.
0
5
0
5
ГК
жи
фиг. 2
| Скповский А.А | |||
| и др | |||
| Лазерная система управления асфальтоукладчика ЛСУА-Г | |||
| - Сб.: Новейшие системы автоматизации дорожно-строительных машин, Рига, 1986, с | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| Устройство для уплотнения дорожно-строительных материалов | 1985 |
|
SU1308670A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
