Способ динамической балансировки ротора
Изобретение относится к области балансировки изделий и может быть использовано для динамической балансировки закрепленных консольно вращающихся роторов.
Известен способ балансировки роторов по а.с. 597934, G 01 M 1/32, заключающийся в том, что измеряют вибрацию опор вращающегося ротора при начальном дисбалансе, определяют корректирующую массу и угол коррекции по измеренной и заданной величине дисбаланса, которую вводят путем установки одновременно двух масс, с последующим удалением одной из них. Недостатком этого способа является необходимость выполнения этих операций для другой плоскости коррекции и, после этого уточнения, повторением этих операций в первой плоскости для устранения дисбаланса, возникающего от взаимного влияния плоскостей коррекции.
Известен способ балансировки ротора по а.с. 1320674, G 01 M 1/32, заключающийся в том, что на ротор устанавливают с возможностью вращения вокруг его оси две корректирующие массы с равными дисбалансами, приводят ротор во вращение, измеряют уровень вибрации ротора и по результатам измерений находят положение одной из масс при расчетном уровне вибрации и поворачивают вторую массу в противоположном направлении до минимального уровня вибрации. Недостатком этого способа является ограничение исходного дисбаланса ротора удвоенной величиной одной корректирующей массы и необходимостью повторения всей совокупности действий при балансировке во второй плоскости коррекции и при устранении взаимного влияния этих плоскостей одной на другую.
Известен способ динамической балансировки роторов, наиболее близкий по технической сущности, выбранный в качестве прототипа, по а.с. 540183, G 01 M 1/32, заключающийся в том, что изменяют на задаваемую величину дисбаланс поочередно в каждой плоскости коррекции, измеряют вибрацию опор вращающегося ротора при начальном дисбалансе и, после каждого измерения дисбаланса, определяют корректирующие массы и углы коррекции по данным измерения вибраций и задаваемым величинам дисбаланса, на ротор устанавливают ампулы (грузы) с заданным значением изменения дисбаланса и изменяют дисбаланс в процессе вращения ротора путем изменения массы ампул.
Недостатком прототипа является необходимость определения составляющих (массы и угла коррекции) дисбаланса в двух плоскостях коррекции и дополнительной коррекции и в той, и в другой плоскостях для компенсации взаимного влияния на результаты балансировки дисбалансов в каждой плоскости.
Технической задачей заявленного изобретения является упрощение конструкции устройства балансировки и сокращение процесса балансировки за счет исключения операций, связанных с раздельной балансировкой в одной и другой плоскостях коррекции, при одновременном исключении операций измерения и компенсации от взаимного влияния одной плоскости коррекции на другую.
Поставленная задача решается следующим образом.
Определяют корректирующие массы и наносят корректирующую массу на поверхность ротора в плоскости, проходящей через центр масс. Закрепив ротор на оси консольно относительно опор оси, приводят ротор во вращение и, изменяя корректирующую массу, компенсируют дисбаланс до минимального значения, по величине изменяемой корректирующей массы определяют корректирующие массы для боковых плоскостей коррекции пропорционально расстояниям каждой плоскости коррекции от центра масс, наносят каждую из масс в соответствующей плоскости коррекции и окончательно устраняют дисбаланс, изменяя корректирующую массу в плоскости коррекции, ближней к опорам оси.
Отличительными признаками в заявленном техническом решении являются: наносят корректирующую массу на поверхность ротора в плоскости, проходящей через центр масс. Закрепляют ротор на оси консольно относительно опор оси, приводят ротор во вращение и, изменяя корректирующую массу, компенсируют дисбаланс до минимального значения, и по величине изменяемой корректирующей массы определяют корректирующие массы для боковых плоскостей коррекции пропорционально расстояниям каждой плоскости коррекции от центра масс и наносят каждую из масс в соответствующей плоскости коррекции, после чего окончательно устраняют дисбаланс, изменяя корректирующую массу в плоскости, ближней к опорам оси.
При такой последовательности действий балансировку ротора в двух плоскостях коррекции можно выполнить, не прибегая к измерениям дисбалансов в каждой из боковых плоскостей коррекции, и исключить необходимость определения коэффициентов взаимного влияния плоскостей коррекции, что повышает точность балансировки роторов и сокращает процесс устранения дисбаланса.
Из изученной патентной и научно-технической литературы авторам неизвестно техническое решение с перечисленной совокупностью признаков, что дало основание сделать вывод о соответствии способа критериям изобретения.
На фиг. 1 представлена схема расположения плоскостей коррекции балансируемого ротора, относительно опор, при горизонтальном положении оси вращения, где приняты следующие обозначения:
ОП1, ОП2 - опоры оси вращения, на которой закреплен ротор,
ПК1, ПК2 - плоскости коррекции ротора,
ЦМ - центр масс, через который проходит плоскость, перпендикулярная оси вращения,
l1, l2 - расстояние от плоскостей ПК1 и ПК2 до плоскости ЦМ,
Нрот - высота ротора,
Д - датчик перемещений (вибраций),
O1 - ось,
O2 - основание.
Способ реализуется следующим образом.
В общем случае динамическая неуравновешенность определяется двумя составляющими: статической неуравновешенностью, при которой ось ротора смещена параллельно его главной оси инерции, и моментной неуравновешенностью, которая проявляется при наличии угла между осью ротора и его главной центральной осью инерции, что смещает точку пересечения осей ротора относительно центра масс.
Суммарный вектор дисбалансов:
где  - главный вектор дисбалансов ротора,
- главный вектор дисбалансов ротора, - главный момент дисбалансов ротора, создаваемый на плече L (расстояние между плоскостями коррекции ПК1 и ПК2) парой дисбалансов
- главный момент дисбалансов ротора, создаваемый на плече L (расстояние между плоскостями коррекции ПК1 и ПК2) парой дисбалансов  DM1=-DM2.
DM1=-DM2.
Главный вектор дисбалансов может быть заменен его составляющими в плоскостях коррекции ПК1 и ПК2:
Для случая симметричного относительно центра масс ротора суммарные векторы дисбалансов, действующие в каждой плоскости коррекции:
l=l1=l2

(см. ГОСТ 22061-76 и Методические указания к ГОСТ, М.: Издательство стандартов, 1977, часть I, разд.1-3, стр.38-41), при этом L принято равным Нрот.
С помощью датчика перемещений (вибраций) Д при вращении определяют величину смещения оси ротора - эксцентриситет еСМ(г•мм/кг=мкм), определяют угол для нанесения массы и дисбаланс:
D=mрот•eсм, (6)
где mрот - масса ротора (см. МУ, М.: Издательство стандартов, 1977, стр. 138).
По величине дисбаланса D, с учетом диаметра ротора, определяют корректирующую массу
mК=D/rК, (7)
где rК - радиус расположения корректирующей массы на поверхности ротора в плоскости коррекции, проходящей через центр масс.
При вращении ротора корректирующую массу mК перемещают по ротору в плоскости, перпендикулярной оси ротора и проходящей через центр масс. При этом подбирают величину и находят место расположения корректирующей массы mK по углу. Таким образом компенсируют дисбаланс D, обеспечивая тем самым совмещение главной центральной оси инерции с осью ротора.
После компенсации дисбаланса D массой mК измеренная датчиком Д величина перемещений пропорциональна удельному дисбалансу еСТ(мкм) (см. МУ, стр. 138), главный момент инерции, соответствующий величине установленной на роторе корректирующей массы mK:
где  - сумма всех моментов неуравновешенных сил,
- сумма всех моментов неуравновешенных сил,
ω - угловая скорость вращения ротора
(см. МУ, часть I, разд.1-3, стр.38-41).
Для этого случая векторы  и выполняется условие статической балансировки D=Dct=mКrK. Действие главного момента дисбалансов
и выполняется условие статической балансировки D=Dct=mКrK. Действие главного момента дисбалансов  не затрагивается (см. МУ, часть II, разд.3, пп.3, 5, стр.119).
не затрагивается (см. МУ, часть II, разд.3, пп.3, 5, стр.119).
При неточном совмещении плоскости коррекции с центром масс или ее несимметричном расположении относительно центра масс, когда дисбаланс D скомпенсирован в центральной плоскости массой mК не полностью, может неявно присутствовать дополнительная неуравновешенность.
Для выявления неуравновешенности величину массы mК (скорректировавшей дисбаланс D) разделяют на две равные части и наносят каждую из них в боковых плоскостях коррекции, расположенных симметрично относительно центра масс симметричного ротора, и приводят ротор во вращение.
При появлении дисбаланса его устраняют, изменяя корректирующую массу в одной, ближней к опорам плоскости коррекции.
Если ротор несимметричен и его диаметры в плоскостях коррекции различны, или центр масс находится на разных расстояниях от плоскости коррекции, то корректирующую массу разделяют на части, пропорциональные расстояниям от каждой плоскости коррекции до центра масс ЦМ, пользуясь формулами:


где D1, D2 - модуль дисбалансов в первой и второй плоскостях коррекции; - главный вектор дисбалансов ротора;
- главный вектор дисбалансов ротора;
mрот - масса ротора; - удельный дисбаланс ротора;
- удельный дисбаланс ротора;
l1, l2 - расстояние первой и второй плоскостей коррекции до центра масс;
Нрот - высота балансируемого ротора.
После разделения масс по плоскостям пропорционально расстояниям и приведения ротора во вращение также может возникнуть дополнительная неуравновешенность от различного влияния корректирующих масс. Для ее устранения изменением корректирующей массы в одной ближней к опорам плоскости коррекции окончательно устраняют дисбаланс ротора.
Использование заявленного изобретения позволяет сократить процесс и повысить точность балансировки роторов в двух плоскостях коррекции, а также упростить конструкцию устройств для динамической балансировки, преимущественно, коротких роторов.
Устройство для динамической балансировки роторов.
Изобретение относится к устройствам для балансировки тел вращения, в частности консольных коротких роторов.
Известно техническое решение по а.с. 1619084, G 01 M 1/02 "Механическая система балансировочного станка", содержащее основание, платформу, связанные пружиной; опоры для ротора, а также узел разделения плоскостей коррекции с системой разделения плоскостей коррекции, недостатком которого является необходимость использования для устранения дисбаланса двух одинаковых систем для каждой плоскости коррекции, при поочередной балансировке в каждой плоскости. Кроме того, процесс балансировки усложняется из-за взаимного влияния дисбалансов двух плоскостей коррекции, что требует повторения операций после балансировки то в одной, то в другой плоскости.
Известно техническое решение по а.с. 721685, G 01 M 1/02 для балансировки автомобильных колес, содержащее корпус, несущий вал с подшипниковыми опорами и фланцем для установки колеса, балансировочный груз, датчик дисбаланса, недостатком которого является наличие одного груза, расположенного отдельно от балансируемого колеса и только в одной плоскости, которая определяется в процессе балансировки. Это приводит к тому, что для получения отбалансированного колеса, необходимо перенести балансировочный груз на поверхность колеса, что связано с изменением плоскости коррекции, массы груза и бесконтрольным изменением дисбалансов в новых плоскостях коррекции.
Наиболее близким, принятым за прототип, является "Устройство для измерения дисбаланса тел вращения", пат. 2001380, G 01 M 1/02, G 01 M 1/22, бюл. 37-38.
Устройство содержит основание, установленную на нем раму с фиксированной осью колебаний, закрепленные на раме опоры для установки тела вращения и систему измерения, закрепленный на основании кронштейн с упругими консольными пружинами, с возможностью взаимодействия с рамой, при этом фиксированная ось колебаний расположена вертикально, а система измерений выполнена по крайней мере с одним датчиком.
Недостатком устройства является наличие оси, вокруг которой совершаются угловые колебания рамы и, соответственно, балансируемого изделия, в результате, когда возникает необходимость балансировки изделия в одной плоскости коррекции, затем в другой, из-за различного расстояния от плоскостей коррекции до оси вращения, даже при одинаковом эксцентриситете в этих плоскостях, момент инерции будет различным. Это увеличивает взаимное влияние результатов балансировки одной плоскости на другую и усложняет процесс балансировки.
Технической задачей является упрощение процесса балансировки и конструкции устройств для динамической балансировки в двух плоскостях консольных роторов.
Поставленная задача решается следующим образом: устройство динамической балансировки снабжено опорами вращающегося вала, установленными на общей платформе, отличающееся тем, что опоры вала жестко связаны с установленной на плоских пружинах платформой, имеющей одну степень свободы перемещений в плоскости, перпендикулярной оси вала, и соединенной с датчиком линейных перемещений, а вал установлен таким образом, чтобы к одному из его концов, консольно, было возможно присоединить балансируемый ротор.
Отличительными признаками в заявленном техническом решении являются: опоры вала жестко связаны с установленной на плоских пружинах платформой, имеющей одну степень свободы перемещения в плоскости, перпендикулярной оси вала и соединенной с датчиком линейных перемещений, а вал установлен таким образом, чтобы к одному из его концов, консольно, было возможно присоединить балансируемый ротор.
Такая совокупность признаков обеспечивает перемещение ротора в плоскости, перпендикулярной оси вращения ротора, в результате чего исключается взаимное влияние плоскостей коррекции.
Из изученной патентной и научно-технической литературы авторам неизвестно техническое решение с перечисленной совокупностью признаков, что дает основание сделать вывод о соответствии заявленного устройства критериям изобретения.
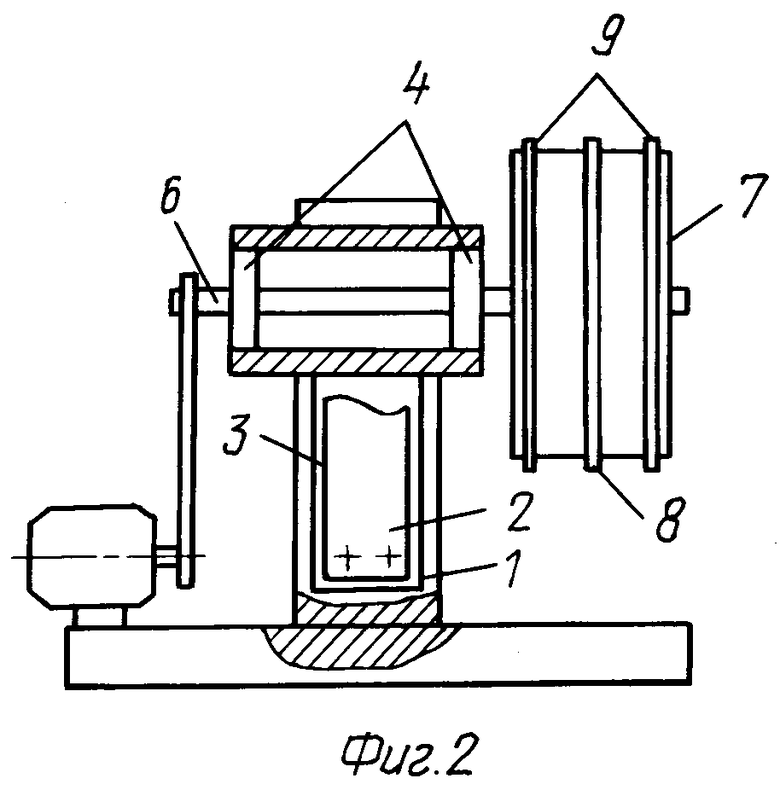
На фигуре 2 представлена схема балансировочного устройства - вид сбоку; на фигуре 3 - вид сзади, вдоль оси вращения, привод не показан. Принятые обозначения:
1 - основание;
2 - плоские пружины;
3 - платформа;
4 - опоры вращающегося вала;
5 - датчик линейных перемещений (вибраций);
6 - вал;
7 - балансируемый ротор;
8 - устройство балансировочное центральное;
9 - устройство балансировочное боковое.
Устройство содержит основание 1, на котором на пружинах 2 закреплена платформа 3 с опорами 4. На основании 1 установлен датчик линейных перемещений (вибраций) 5, соединенный с платформой 3. В опорах 4 установлен вал 6, соединенный с электроприводом вращения (на чертеже показан условно), к которому консольно присоединен балансируемый ротор 7. На роторе для нанесения корректирующих балансировочных масс установлены (условно) устройства балансировочные - центральное 8 в плоскости, проходящей через центр масс, и боковые 9 - в боковых плоскостях коррекции. Измерительное устройство, соединенное с датчиком 5 линейных перемещений (вибраций), условно не показано.
Устройство работает следующим образом.
На вал 6, вращающийся в опорах 4, устанавливают балансируемый ротор 7. На ротор устанавливают устройства балансировочные - центральное 8 и боковые 9, на которых закрепляют корректирующие дисбаланс ротора массы, причем устройство балансировочное 8 устанавливают в плоскости, перпендикулярной оси вращения вала 6, проходящей через центр масс балансируемого ротора 7. Приводят ротор во вращение, с помощью датчика 5 измеряют эксцентриситет вращающегося ротора и определяют параметры дисбаланса и корректирующую массу, затем устанавливают корректирующую массу соответствующим образом на устройство балансировочное центральное 8 и повторным пуском устраняют дисбаланс ротора 7. По величине этой корректирующей массы, разделяя ее на две равные части или на части, пропорциональные расстояниям плоскостей коррекции до плоскости, проходящей через центр масс, определяют корректирующие массы для левой и правой плоскостей коррекции и наносят их на соответствующие устройства балансировочные 9. В случае увеличения дисбаланса после разделения корректирующей массы, снятой с центрального балансирующего устройства 8, уточняя корректирующую массу на боковом устройстве 9, в частности на ближнем к опорам 4, с повторным пуском окончательно устраняют дисбаланс ротора 7.
Использование заявленного изобретения позволяет упростить процесс и повысить точность, выполняя операции балансировки в двух плоскостях коррекции роторов, которые могут быть закреплены консольно относительно опор вала, при значительном упрощении конструкции устройства для балансировки роторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ | 2000 |
|
RU2185609C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА С ПРИВОДНОЙ МУФТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2387962C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2002 |
|
RU2225603C2 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2002 |
|
RU2225602C2 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2008 |
|
RU2425345C2 |
| СТАНОК ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2010 |
|
RU2455624C2 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2007 |
|
RU2336509C1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2007 |
|
RU2353910C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |

Изобретение относится к области балансировки изделий и может быть использовано для динамической балансировки консольно закрепленных коротких роторов. Способ динамической балансировки роторов заключается в том, что наносят корректирующую массу на поверхность ротора в плоскости, проходящей через центр масс, и закрепляют ротор на оси консольно относительно опор оси, приводят ротор во вращение и, изменяя корректирующую массу, компенсируют дисбаланс до минимального значения, по величине изменяемой корректирующей массы определяют корректирующие массы для боковых плоскостей коррекции пропорционально расстояниям каждой плоскости коррекции от центра масс, наносят каждую из масс в соответствующей плоскости коррекции и окончательно устраняют дисбаланс, изменяя корректирующую массу в плоскости коррекции, ближней к опорам оси. Устройство для динамической балансировки роторов содержит вращающийся вал, его опоры, установленную на плоских пружинах платформу, имеющую одну степень свободы перемещения в плоскости, перпендикулярной оси вала, и датчик линейных перемещений, причем опоры вала жестко закреплены на платформе, платформа соединена с датчиком линейных перемещений, а вал установлен таким образом, чтобы к одному из его концов было возможно консольно присоединить балансируемый ротор. Данное изобретение направлено на упрощение процесса балансировки и конструкции устройства для ее реализации за счет исключения операций, связанных с раздельной балансировкой ротора в двух плоскостях коррекции. 1 з.п.ф-лы, 3 ил.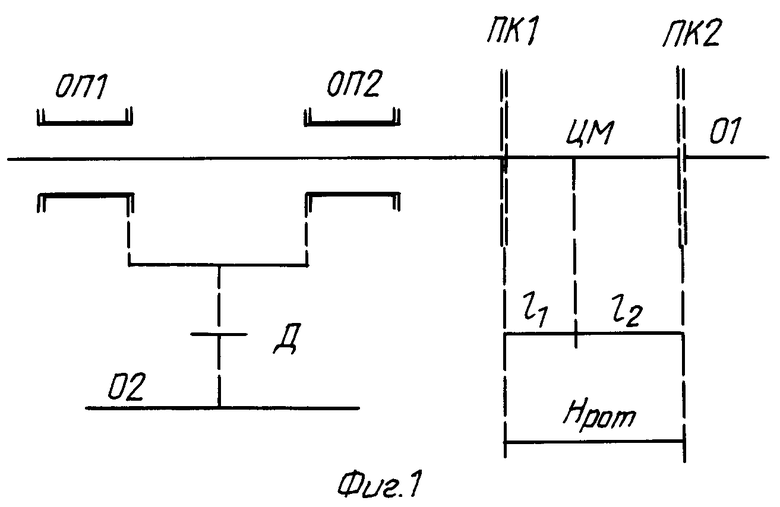
| Устройство для определения неуравновешенности дисковых роторов | 1966 |
|
SU455555A3 |
| US 4445373 А, 01.05.1984 | |||
| Автоматическое балансировочное устройство | 1978 |
|
SU693136A1 |
| Устройство для балансировки автомобильных колес | 1977 |
|
SU721685A1 |
| Приспособление для картограмм | 1921 |
|
SU247A1 |
| СПОСОБ ПРОИЗВОДСТВА ЖЕЛЕЙНОГО МАРМЕЛАДА | 2002 |
|
RU2227521C1 |
| СПОСОБ БАЛАНСИРОВКИ УПРУГО ДЕФОРМИРУЮЩИХСЯРОТОРОВ | 1972 |
|
SU436255A1 |
| Способ динамической балансировки роторов | 1973 |
|
SU540183A1 |
| Способ балансировки роторов | 1976 |
|
SU571723A1 |
| Способ балансировки ротора | 1985 |
|
SU1384987A1 |
| Способ настройки станка для динамической балансировки роторов | 1982 |
|
SU1046634A1 |
| DE 4019721 A1, 10.01.1991. | |||

