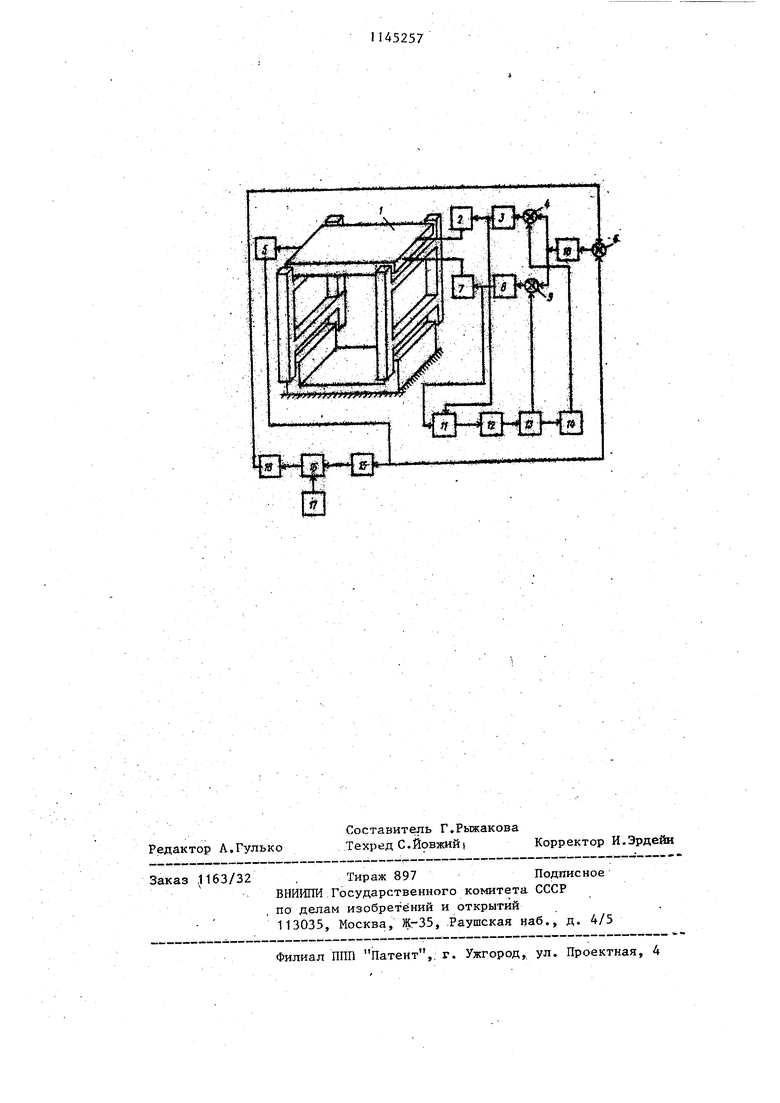
Изобретение относится к измерительной технике и может быть использовано для испытаний сейсмической ап паратуры. Известен низкочастотный вибростенд, содержащий виброплатформу, взаимодействующий с ней первый элект родинамический вибровозбудитель, подключенные к нему последовательно соединенные первьй усилитель и первый блок сравнения, взаимодействующий с виброплатформой датчик перемещений, подключенный к нему второй блок сравнения, третий блок сравнени интегратор и подключенные к нему выходами источник опорного напряжения и амплитудный детектор 1 J, i Недостатком известного устройства является низкая точность воспроизведения параметров колебаний. Цель изобретения - повышение точности в.оспроизведения параметров колебаний. Поставленная цель достигается тем что низкочастотный вибростенд, содер жащий виброплатформу, взаимодействую щий с ней первый электродинамический зибровозбудитель, подключенные к нему последовательно соединенные пер вый усилитель и первый блок сравнеНИЛ, взаимодействующий с виброплатфЬ мой датчик перемещений, подключенные к нему второй блок сравнения, третий блок сравнения, интегратор и подключенные к нему выходами источник опор ного напряжения и амплитуднь1й детектор, снабжен взаимодействукяцим с виб роплатформой вторым электродинамическим вибровоЗбудителём, подключенным к нему вторым усилителем к выходу которого подключен третий блок сравнения, первьм блоком коррекции, включенным между выходом вто рого блока сравнения и входами первого и третьего блоков сравнения, подключенными к токовым катушкам электродинамич ескйх вибровозбудителей, последовательно соединенными дифференциальным усилителем, вторым блоком коррекции, третьим усилйтелем, второй выход которого подключен к второму входу третьего блока сравнения и инвертором, выходом. соединенным с вторым входом первого блока, сравнения,;и управляемым генератором, выход которого подключен к второму входу второго блока сравнения, вход генератора подключен к выходу интегратора, а вход амплитудного детектора подключен к выходу датчика перемещений. На чертеже представлена функциональная схема низкочастотного вибростенда. Низкочастотный вибростенд содержит виброплатформу 1, взаимодействующий с ней первый электродинамический вибровозбудитель 2, подключенные к нему последовательно соединенные первый усилитель 3 и первьй блок 4 сравнения, взаимодействующий с виброплатформой датчик 5 перемещений, подключенньш к нему первым входом второй блок 6 сравнения, взаимодействующий с виброплатформой, второй электродинамический вибровозбудитель 7, подключенный к нему второй усилитель 8, к выходу которого подключен третий блок 9 сравнения, первый блок 10 коррекции, вход которого соединен с выходом второго блока 6 сравнения, а выход - с входами первого и третьего блоков 4 и 9 сравнения, подключенные к - токовым катушкам электродинамических вибровозбудителей 2 и 7 поцледовательно соединенные дифференциальный усилитель 11, BTopofi блок 12 коррекции, третий усилитель 13, второй выход которого подключен к второму входу третьего блока 9 сравнения, и инвертор 14, выходом соединенный с вторым входом первого блока 4 сравнения. Кроме того., вибростенд содержит последовательно соединенные двухполупериодньй амплитудный детектор 15, вход которого соединен с выходом датчика 5 перемещений интегратор 16, второй вход которого соединен с выходом источника 17 опорного напряжения, и управляющий генератор 18, выход которого соединен с вторым входом второго блока 6 сравнения. Низкочастотньй вибростенд работает следующим образом. Сигнал с выхода датчика 5 перемеений через второй блок 6 сравнения, ервую корректирующую цепь 10, перьй и третий блоки 4 и 9 сравнения оступает на входы первого и второго силителей 3 и 8 и далее на электроинамические вибровозбудители 2 и 7, оторые создают силу, пе1 емещаю1цую иброплатформу 1 в положение, при отором сигнал датчика 5 перемещений близок к нулю. 3 Первый блок 10 коррекхщн предна начен для обеспечения устойчивости указанного контура регулирования по перемещению и обеспечению соответствующих динамических характерис тик стенда. При появлении на выходе управляю щего генератора 18 управляющего сиг нала виброплатформа 1 приводится в движение, и на выходе датчика 5 перемещений появляется сигнал, пост пающий на второй блок 6 сравнения, где он сравнивается с управляющим сигналом. В результате на выходе вто рого блока 6 сравнения появляется сигнал, корректирующий работу через первый блок 10 коррекции, первый и третий блоки 4 и 9 сравнения, первый и второй усилители 3 и 8, и поступает на электродинамические вибро возбудители 2 и 7, вынуждакядие вибро платформу 1 совершать колебательное движение согласно управляющему сигт налу. Передаточная функция первого .блока 10 коррекции K,( ()Т,РН) г-. , , -: г UJ UP) (TjPHl TjpM) где К| - коэффициент передачи корректирующей цепи постоянные времени элементарных звеньев. Стабилизация амплитуды колебаний при изменении выходного напряжения управляющего генератора 18 или изменение параметров низкочастотного вибростенда осуществляется контуром стабилизации амплитуды, в который входит последовательно соединенные двухполупериодный амплитудный детектор 15, интегратор 16, источник 17 опорного напряжения и управляющий ге нератор 18. Контур компенсации угловых колебаний работает следующим образом. При возникновении угловых колебаний вокруг вертикальной оси в катушке электродинамических вибровозбуди574телей 2 и 7 колебании наводится электродвижущая сила ) ,( где , Д(, соответственно коэффи циенты преобразований электродинамических вибровозбудителей 2 и 7i X , Ч - соответственно линейная и угловая скорости движения подвижной системы, 1 I 2 расстояние от оси ОХ (не обозначена) до первого и второго эле стродинамического вибрЪвозбудителя2 и 7. Таким образом, на выходе дифференциального усилителя 11 сигнал пропорциональный угловой скорости if Этот сигнал после усиления поступает в электродинамические вибровозбудители 2 и 7, которые создают омент, компенсирующий угловые колебания, подвижной системы вокруг оси ОУ (не обозначена). Второй блок 12 коррекции предназначен для обесечения устойчивости и имеет переаточную функцию tp)) где КQ (, - соответственно коэффициент передачи и постоянная времени форсирующей цепи. Использование в низкочастотном вибростендё глубокой обратной связи по перемещению вдоль оси ОХ позволяет осуществить линеаризацию линейной статической характеристики электродинамических вибровозбудителей 2 и 7 и создать стенд, в котором при амплитудах колебаний 20 мм нелинейность статической характеристики не превышает 0,2%.
| название | год | авторы | номер документа |
|---|---|---|---|
| НИЗКОЧАСТОТНЫЙ ВИБРОСТЕНД | 1991 |
|
RU2032158C1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОКАНАЛЬНЫМ ВИБРОСТЕНДОМ | 1998 |
|
RU2159949C2 |
| Автоколебательный вибростенд | 1981 |
|
SU991384A1 |
| ВИБРАЦИОННЫЙ МАГНИТОМЕТР | 2007 |
|
RU2341810C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОДИНАМИЧЕСКИМ ВИБРОСТЕНДОМ | 1973 |
|
SU392471A1 |
| Электродинамический градуировочный вибростенд | 1989 |
|
SU1651124A1 |
| Устройство для контроля разрушения изделия при испытании на автоколебательном вибростенде | 1984 |
|
SU1298567A1 |
| Устройство для управления многоканальным вибростендом | 1980 |
|
SU924665A1 |
| Устройство для измерения механической добротности объекта | 1978 |
|
SU763715A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1991 |
|
RU2016667C1 |
НИЗКОЧАСТОТНЫЙ ВИБРОСТЕНД, содержащий, виброплатформу, взаимодействующий с ней первый электродина-: мический вибровозбудитель, подключенные к нему последовательно соединенные первый усилитель и первый блок сравнения, взаимодействующий с виброплатформой датчик перемещений, подключенный к нему второй блок сравнения, третий блок сравнения, интегратор иг подключенные к нему выходами источник опорного напряжения и амплитудный детектор, отличающийся тем, что, с целью повышения точности воспроизведения параметров колебаний, он снабжен взаимодействующим с виброплатформой вторым электродинамическим вибровозбудителем, подключенным к нему вторым усилителем, к выходу которого Подключен третий блок сравнения, первым блоком коррекции, включенным мелду выходом второго блока сравнения и входами первого и третьего блоков сравнения, подключенными к токовьгм катушкам электродинамических вибро- возбудителей, последовательно соединенными дифференциальньш усилителем, вторым блоком коррекции, третьим усилителем, второй выход которого подключен к второму входу третьего блока сравнения, и инвертором, выходом Соединенным с вторбй входом первого блока сравнения, и управляемым генератором, выход кото рого подключен к второму входу второго блока сравнения, вход генератора подключен к выходу интегратора, -а вход амплитудного детектора под4 СЛ 1C ключен к выходу датчика перемещений. сд 
| I | |||
| Автоколебательный вибростенд | 1981 |
|
SU991384A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
