to ел
00
{ обретение относится к области автоматического уиравления самоходными малинами.
Цель изобретения - расширение функциональных возможностей.
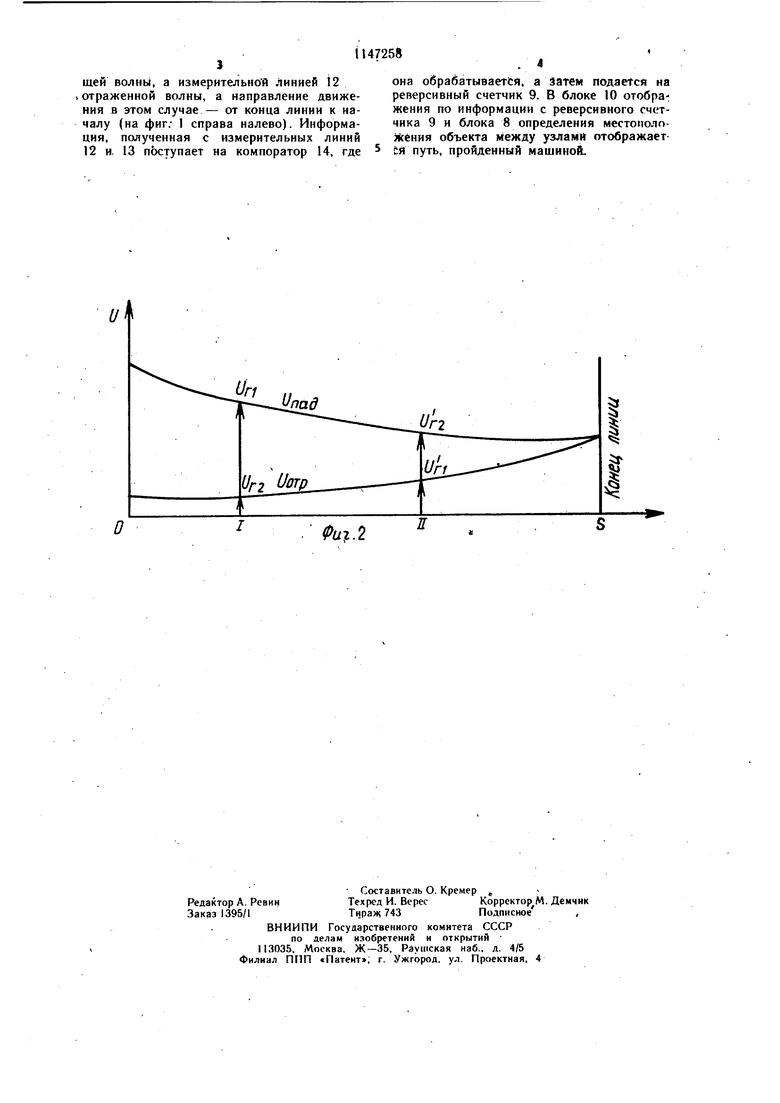
На фиг. 1 изображено устройство, реализующее способ; на фиг. 2 - эпюры напряженности поля падающей и отраженной волн вдоль ориентирующих токонесущих проводов.
Устройство, реализующее способ,состоит из генератора синусоидальных колебаний I-, ориентирующих проводов 2, чувствительных элементов 3 и 4, преобразователей 5 и 6, компоратора -7, блока 8 определения местонахождения объекта между узлами, реверсивного счетчика 9, блока 10 отображения, двунаправленного ответвителя рефлектометра) 11, состоящего из измерительной линии падающей 12 и отраженной 13 волн, компоратора -14.
Способ осуществляется следующим образом.
Вдоль трассы движения самоходной ма щины прокладывают ориентирующие провода 2, в которых с помощью подключенного к ним генератора синусоидальных колебаний 1 создают стоячую электромагнитную волну, затем по ходу, движения мащины измеряют (при помощи чувствительного элемента 3) вектор напряженности электромагнитного поля в одной точке пространства (названной первой), преобразуют его (при помощи преобразователя 5) в соответствующий электрический сигнал и ориентируют мащину в плоскости,, перпендикулярной оси движения. Одновременно с замером в первой точке производят замер во второй точке пространства, смещенной относительно первой на расстояние, меньщее длины стоячей волны Дет, при помощи чувствительного элемента 4. Расстояние между точками замера берется меньше длины стоячей волны, поскольку только при этом условии возможно однозначное определение местоположения узла стоячей волны. Затем преобразуют вектор напряженности в электрический сигнал в преобразователе 6. Если алгебраическая сумма сигналов с преобразователей 5 и 6 отлична от нуля, тс на выходе компоратора 7 импульс не вырабатывается, если при дальнейшем движении транспорта алгебраическая сум ма сигналов равна нулю (что соответсгву-, ет прохождению узла стоячей волны) та. ла выходе компоратора 7 формируется импульс, который поступает на вход реверсивного счетчика 9. В блоке 10 отображения по количеству сигналов дискретно фиксируют расстояние, пройденное машиной. По частоте следования сигналов определяют среднюю скорость движения машины; Для того, чтобы определить местоположение между узлами стоячей волны, в блоке 8
вычисляют отношения сигналов, полученных с преобразователей 5 и 6. Каждому от иошению однозначно соответствует точки между двумя узлами, а положение машины между узлами определяется как функция этого отношения.
С целью повышения надежности определения местоположения машины между узлами стоячейг волны вычисление отношения сигналов производят таким образом,
чтобы меньший по амплитуде сигнал делился на больший, так как при нахождении одного из чувствительных элементов в узле стоячей волны, где напряженность электромагнитного поля равна нулю, наблюдалось бы неопределенность этого отношения (при
делении на нуль).
Таким образом, с помощью устройства можно определить местоположение транспорта на маршруте, но для этого необходима информация о направлении движения
самоходной машины.
Для определения направление движения самоходной машины на ней распола1ают .двунаправленный ответвитель 11, состоящий из измерительных линий 12 и 13и компоратора 14 . Допустим, что мы не знаем -направление .движения самоходной машины, но знаем, что измерительная линия 12 находится в задней, а измерительная линия 13 - в передней части машины,
т.е. с помощью измерительной линии 12 замеряют напряженность поля, распространяющегося по ходу движения самоходной машины, а с помощью измерительной линии 13 - Напряженность поля, распространяющегося против направления движения
самоходной машины. При заданном (фиг. 1) расположении измерительных линий 12 и 13, напряженность поля, замеренная с помощью измерительной линией 12 будет соответствовать по амплитуде Un, а с помощью измерительной линии 13 - Ur%
(фиг. 2). Так как Ur, Uf, то с помощью измерительной линии 12 определена напряженность падающей волны, а с помощью измерительной линии 13 - напряженность отраженной волны. Таким образом, при известном расположении измерительных лит НИИ .12 и 13 двунаправленного ответвителя Ц на самоходной машине можно определить направление движения (на фиг. 1 машина движется) слева направо, т.е. от начала к концу линии). Если самоходная
машина движется Б противоположном направлении, т.е. измерительные линии 12 и 13 поменяются местами, то иногда напряженность Ur, замеренная с пЪмощью измерительной линии 13 будет больше напряженности Uri, замеренной с помощью измерительной линии 2 (фиг. 1 и 2). Таким образом, теперь с помощью измерительной линии 13 замерена напряженности, падающей волны, а измерительной линией 12 отраженной волны, а направление движения в этом случае - от конца линии к началу (на фиг; I справа налево). Информация, полученная с измерительных линий 12 н. 13 пбступает на компоратор 14, где
она обрабатывается, а затем подается на реверсивный счетчик 9. В блоке 10 отображения по информации с реверсивного сч(тчнка 9 и блока 8 определения местоположения объекта между узлами отображается путь, пройденный машиной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов | 1982 |
|
SU1017180A1 |
| Способ ориентации самоходной машины в переменном электромагнитном поле токонесущих проводов | 1983 |
|
SU1087965A1 |
| Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов | 1983 |
|
SU1136757A1 |
| Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов | 1983 |
|
SU1139378A1 |
| Устройство для неразрушающего контроля диэлектриков | 1980 |
|
SU907423A1 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ ПОСТОРОННЕГО ОБЪЕКТА, УСТАНОВЛЕННОГО ВБЛИЗИ СРЕДСТВА ВВОДА, ИСПОЛЬЗУЕМОГО ДЛЯ ИДЕНТИФИКАЦИИ И/ИЛИ АВТОРИЗАЦИИ, СРЕДСТВО ВВОДА И ОБСЛУЖИВАЮЩАЯ МАШИНА | 2011 |
|
RU2553229C2 |
| СОГЛАСУЮЩЕЕ АНТЕННОЕ УСТРОЙСТВО ДМКВ ДИАПАЗОНА ДЛЯ СИГНАЛОВ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2018 |
|
RU2694136C1 |
| РАДИОВОЛНОВОЙ СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ | 2005 |
|
RU2292600C1 |
| Радиоволновый уровнемер | 1981 |
|
SU1010469A1 |
| Автоподстроечный способ измерения малого значения уровня вещества | 2019 |
|
RU2706453C1 |
СПОСОБ ОРИЕНТАЦИИ САМОХОДНЫХ МАШИН В ПЕРЕМЕННОМ ЭЛЕКТРОМАГНИТНОМ- ПОЛЕ ТОКОНЕСУЩИХ ПРОВОДОВ по авт. св. № 1017180, отличающийся тем, что, с целью расширения функциональных возможностей, определяют напряженностьполя падающей и отраженной электромагнитных волн по и против движения машины, сравнивают их и по разности величин и знаку этой разности определяют направление движения машины.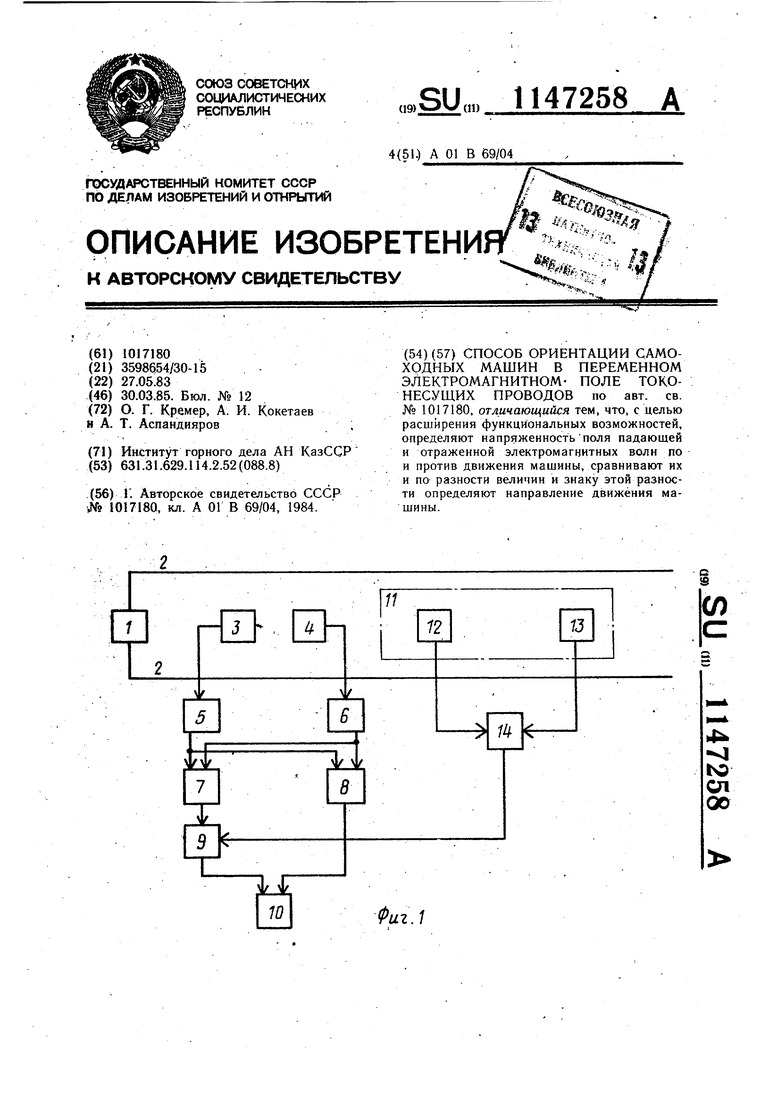
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов | 1982 |
|
SU1017180A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
