Изобретение относится к автоматическому ..управлению движением самоходных машин.
Известен способ ориентации самоходных машин в индукционном поле, включающий преобразование напряженности индукционного поля в соответствующее напряжение, сравнение его с эталоном для данной эквидистантной линии, выделение сигнала ошибки (как разности этих напряжений), ориентирование самоходных машин по нулевой эквидистантной линии индукционного поля, которое создается однонаправленными токами, и выделение сигнала ошибки (как разности после сравнения его с нулевым эталонным напряжением) 1.
Однако в известном способе ориентация самоходной машины сводится лишь к управлению движением машины по заданной траектории, при этом отсутствует информация о пройденном пути, что ограничивает возможности автоматического управления самоходными машинами.
Йаиболее близким к предлагаемому является способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов, включаюший создание стоячей электромагнитной волны в токонесущих проводах, измерение вектора напряженности электромагнитного поля стоячей волны, преобразование его в электрический сигнал и определение местоположения самоходной машины на маршруте путем подсчета узлов стоячей волны 2.
Недостатком данного способа является низкая надежность ориентации самоходной машины вдоль токонесущих проводов при произвольном расположении корпуса машин относительно направляющих.
Цель изобретения -повышение надежности ориентации самоходной машины вдоль токонесущих проводов.
Поставленная цель достигается тем, что согласно способу ориентации самоходных мащин в переменном электромагнитном поле токонесущих проводов, включающему создание стоячей электромагнитной волны в токонесущих проводах, измерение вектора напряженности электромагнитного поля стоячей волны, преобразование его в электрический сигнал и определение местоположения самоходной машины на маршруте путем подсчета узлов стоячей волны, в токонесущих проводах создают бегущую электромагнитную волну с длиной, отличной от длины стоячей волны, одновременно с замером вектора напряженности электромагнитного поля стоячей волны в тех же точках производят измерение вектора напряженности электромагнитного поля бегущей волны, который преобразуют в электрический сигнал, определяют отношение сигналов
векторов напряженности электромагнитных полей стоячей и бегущей волн и по этому отношению определяют местоположение самоходной машины на маршруте.
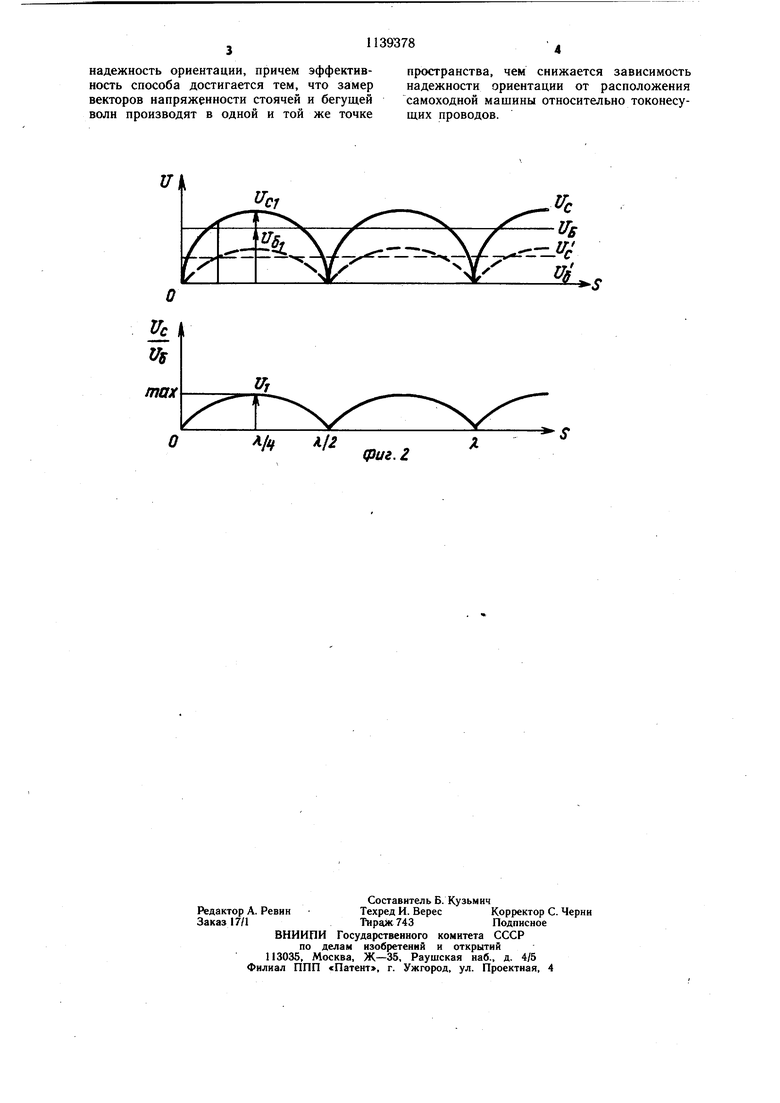
На фиг. 1 изображено устройство, реализующее предлагаемый способ ориентации; на фиг. 2 - эпюры напряжений стоячей и бегущей электромагнитных волн и скорректированная стоячая электромагнитная волна.
Устройство, реализующее предлагаемый способ ориентации, состоит из генератора 1 синусоидальных колебаний, выдающего переменное напряжение низкой и высокой частот, токонесущих проводов 2, чувствительного элемента 3, электрических фильтров 4 и 5, преобразователей 6 и 7, блока 8 коррекции, блока 9 сравнения.
Способ осуществляется следующим обQ разом.
Вдоль трассы движения самоходной машины прокладывают токонесущие провода 2, в которых с помощью генератора 1 синусоидальных колебаний, выдающего синусоидальные напряжения высокой и низкой частот, создают стоячую вОлну высокой частоты с амплитудным значением Uc и бегущую волну низкой частоты с амплитудным значением . Затем одновременно производят замер векторов напряженностей стоячей
,, и бегущей волн с помощью чувствительного элемента 3, чем достигается замер этих напряженностей в одной и той же точке пространства. Фильтром 4 высокой частоты выделяется замеренный вектор напряженное ти стоячей волны, а фильтром 5 низкой часто
5 ты - вектор напряженности бегущей волны. В преобразователях 6 и 7 эти векторы преобразуют в электрические сигналы Uc и U, которые поступают в блок 8 коррекции, с помощью которого вычисляют отношение сигнала Uci напряженности стоячей волны к сигналу Urf- напряженности бегущей волны, а по полученному отнощению Ui, равному Ucj/U j) в блоке 9 сравнения определяют местоположение самоходной машины на маршруте. Отношение между узлами стоячей
5 волны изменяется в пределах (uax в первой четверти стоячей волны, а во второй - , т. е. каждому отношению будет соответствовать своя точка между узлами (при попадании в узел стоячей волны имеем , а впучность - Um«). Фиксируя, эти моменты можно дискретно определять местоположение самоходной мащины на маршруте, а по промежуточным значениям отнощений - положение между узлами стоячей волны.
5 Предлагаемый способ .ориентации самоходных мащин в переменном электромагнитном поле токонесущих проводов (по сравнению с известными способами) повышает
надежность ориентации, причем эффективность способа достигается тем, что замер векторов напряженности стоячей и бегущей волн производят в одной и той же точке
пространства, чем снижается зависимость надежности ориентации от расположения самоходной машины относительно токонесущих проводов.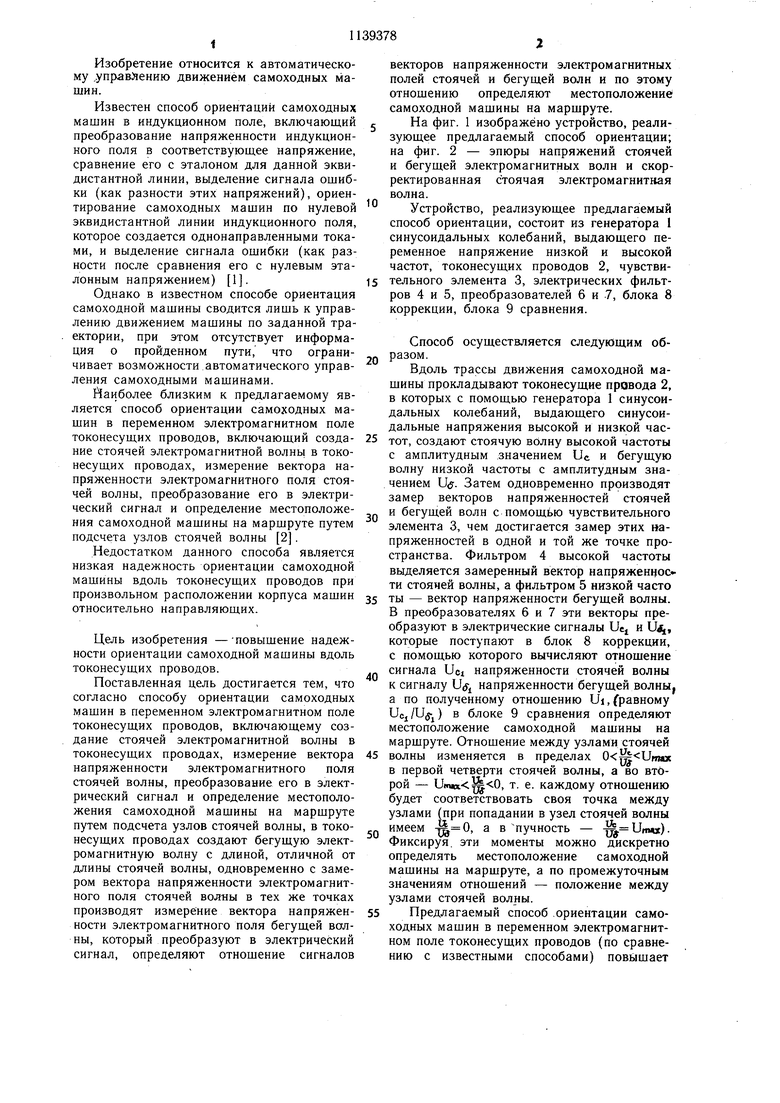
СПОСОБ ОРИЕНТАЦИИ САМОХОДНЫХ МАШИН В ПЕРЕМЕННОМ ЭЛЕКТРОМАГНИТНОМ ПОЛЕ ТОКОНЕСУЩИХ ПРОВОДОВ, включающий создание стоячей электромагнитной волны в токонесущих проводах, измерение вектора напряженности электромагнитного поля стоячей волны, преобразование его в электрический сигнал и определение местоположения самоходной машины на марщруте путем подсчета узлов стоячей волны, отличающийся тем, что, с целью повышения надежности ориентации самоходной машины вдоль токонесущих проводов, в последних создают бегущую электромагнитную волну с длиной, отличной от длины стоячей волны, одновре-. менно с замером вектора напряженности электромагнитного поля стоячей волны в тех же точках производят измерение вектора напряженности электромагнитного поля бегущей волны, который преобразуют в электрический сигнал, определяют отношение сигналов векторов напряженности электромагнитных полей стоячей и бегущей волн и по этому отношению определяют местоположение самоходной мащины на марСО щруте. со 00 00
и
и,
С1
-
ax
ЧЧ 12
с
Б
S
фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| МЕХАНИЗМ ПРИВОДА ВЫСЕВАЮЩЕГО УСТРОЙСТВА СЕЯЛКИ | 0 |
|
SU398198A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов | 1982 |
|
SU1017180A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
