2. Устройство по п. 1, о т л ич а О щ е е с я тем, что блок управления вьшолнен в виде блока ввода, регистра изменения частоты, счетчика команд, генератора тактовых импульсов, регистра изменения фазы, двух сумматоров кодов приращения частоты, двух сумматоров кодов изменения фазы восьми элементов И, причём блок ввода соединен со счетчиком команд, с регистром изменения частоты, с регистром изменения фазы и с одними из входов элементов И, один из выходов счетчика команд соединен с одним из входов регистра изменения частоты и регистра изменения фазы, два други
выхода соединены с сумматорами кодов изменения фазы, входы сумматоров кодов приращения частоты соединены с выходом регистра изменения частоты входы сумматоров кодов изменения фазы соединены с выходом регистра изменения фазы, выход генератора тактовых импульсов соединен с одним из входов счетчика команд, а выходы сумматоров кодов приращения частоты и сумматоров кодов изменения фазы соединены с входами соответ ствующих элементов И , выходы которых объединены попарно и являются выходами блока управления.. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения изделий | 1980 |
|
SU960101A1 |
| ЛИНИЯ РАДИОСВЯЗИ С ПРОСТРАНСТВЕННОЙ МОДУЛЯЦИЕЙ | 1999 |
|
RU2152132C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ СООБЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2081456C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ПОВЫШЕНИЯ КАЧЕСТВА КАНАЛА ПЕРЕДАЧИ ДАННЫХ | 2014 |
|
RU2603493C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОГЕРЕНТНОГО ОПТИЧЕСКОГО СИГНАЛА СУММИРОВАНИЕМ ПУЧКОВ ИЗЛУЧЕНИЯ N ЛАЗЕРОВ В ВЕРШИНЕ КОНИЧЕСКОЙ ПОВЕРХНОСТИ И ПЕРЕДАТЧИК КОГЕРЕНТНОГО ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ, РЕАЛИЗУЮЩИЙ ЭТОТ СПОСОБ | 1992 |
|
RU2109384C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ РАДИОГОЛОГРАММЫ В УСЛОВИЯХ ОБЗОРА ПРОСТРАНСТВА И ВИЗУАЛИЗАЦИИ ВОССТАНОВЛЕННОГО ИЗОБРАЖЕНИЯ | 2006 |
|
RU2309442C1 |
| Цифровой фазометр | 1982 |
|
SU1061062A1 |
| Система связи с широкополосным многочастотным сигналом в коротковолновом диапазоне частот | 2024 |
|
RU2824041C1 |
| УЧЕБНЫЙ ПРИБОР ПО РАДИОТЕХНИКЕ | 2007 |
|
RU2319218C1 |
1. ВИБРАЦИОННОЕ УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ МАЛОГАБАРИТНЫХ ОБЪЕКТОВ , содержащее несу1ций с амортизатором орган в виде составного концентратора с жеетко закрепленным на его тдрце широкополосным преобразователем, подключенным к широкополосному усилителю, блок управления, соединенный с цепочкой из последовательно соединенных генератора функционального напряжения, частотного модулятора и задающего генератора, о т л ичающееся тем, что, с целью повышения точности, оно снабжено вторым широкополосным преобразователем, жестко закрепленным на другом торце несущего органа, двумя фазовращателями, вторым широкополосным усилителем, дополнительной цепочкой из последовательно соединенных генератора функционального напряжения, частотного модулятора и задающего генератора,причем задающие генераторы обеих цепочек соединены через фазовращатели с широкополосными усилителями, один из входов каждого фазовра- 5 щателя соединен с соответствующим (Л выходом блока управления, один из выходов которого соединен с входом второго генератора функционального напряжения, а выход второго широкополосного усилителя соединен с вторым широкополосным преобразователем.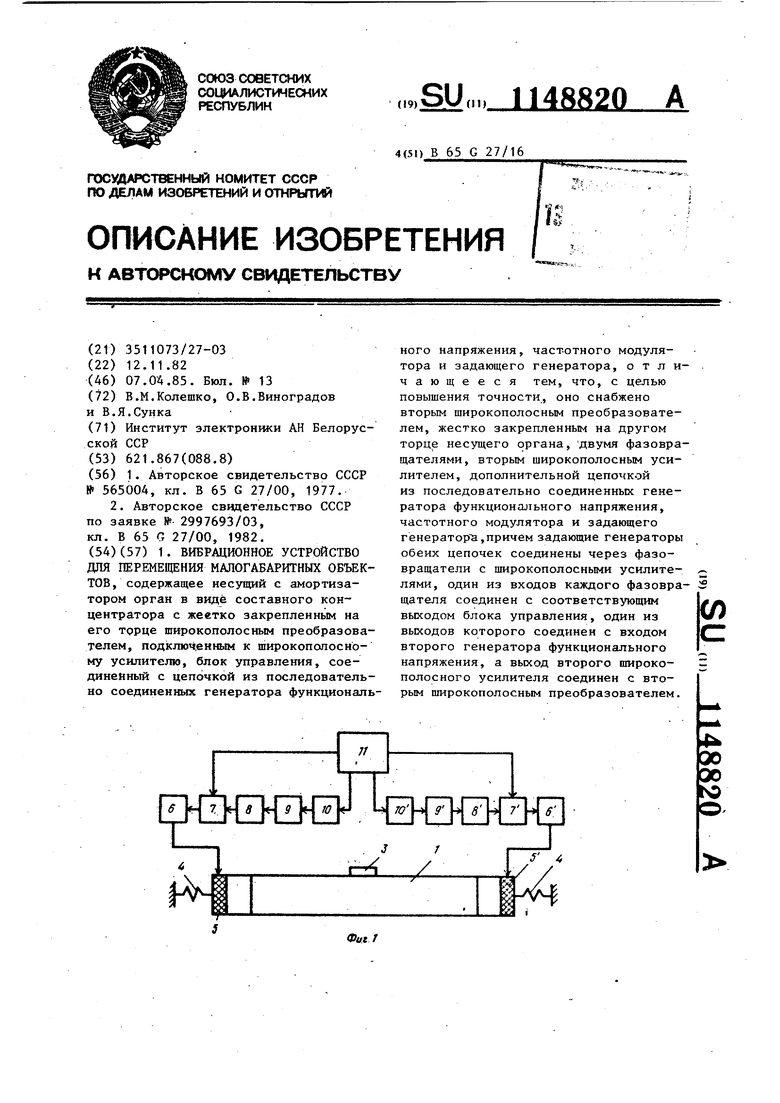
Изобретение относится к электронному приборостроению и может быть использовано для точного и плавного перемещения мелких штучных изделий.
Известно устройство вибрационного транспортирования объектов, содержащее несущий орган, к которому с обеих сторон симметрично прикреплены высокочастотные пьезокерамические вибраторы, подключенные к генератору тока высокой частоты посредством фазосдвигающих цепей, а несущий орган установлен на регулируемых амортизаторах. При этом напротив лежанще высокочастотные вибраторы возбуждаются электрическим напряжением синфазно. При частоте питающего тока, соответствующей частоте продольного резонанса несущего органа, возбуждаются продольные бегущие ультразвуковые волны, которые транспортируют перемещаемый объект. Изменение направления перемещения объекта осуществляется измене| ием направления распространения волн lj .
Однако устройство не обеспечивает высокой точиости перемещения малогабаритных изделий.
Известно вибрационное устройство для перемещения малогабаритных объектов, содержащее иесущ с амортизатором орган в виде составного кон центратора с жестко закрепленным на его торце широкополосньм преобразователем, подключенным к широкополосному усилителю, блок управления, соединенный с цепочкой из последовательно соединенных генератора функционального напряжения, частотного модулятора и задающего генератора 2J . Однако известное устройство не обеспечивает необходимой точности перемещения малогабаритных объектов
o (микроэлементов).
Цель изобретения - повьппение точности перемещения малогабаритньсх объектов.
Поставленная цель достигается
5 тем, что вибрационное устройство
для перемещения малогабаритных объектов, содержащее несущий с амортизатором орган в виде составного концентратора с жестко закрепленным на
20 его торце широкополосным преобразов,ателем, подключенным к широкополосному усилителю, блок управления, соединенный с цепочкой из последовательно соединенных генератора функционального напряжения, частотного модулятора и задающего генератора, снаб:жен вторым широкополосным преобразователем, жестко закрепленным на другом торце несущего органа, двумя фазовращателями, вторым широкополосным усилителем, дополнительной цепочкой из последовательно соединенных генератора функционального напряжения, частотного модулятора и задакщего
генератора, причем задающие генераоры обеих цепочек соединены через ; азовращатели с широкополосными усиителями, один из входов каждого азовращателя соединен с соответст- 5 вующим выходом блока управления, один из выходов которого соединен с входом второго генератора функционального напряжения, а выход второго шрокополосного усилителя соединен О с вторым широкополосным преобразователем.
Блок управления выполнен в виде блока ввода, регистра изменения частоты, счетчика команд, генератора S тактовых импульсов, регистра изменения фазы, двух сумматоров кодов приращения частоты, двух сумматоров кодов изменения фазы, восьми элементов И, причем блок ввода соединен со 20 счетчиком команд, с регистром изменения частоты, с регистром изменения фазы и с одними из входов элементов И, один из выходов счетчика команд соединен с одним из входов регистра W изменения частоты и регистра изменения фазы, два других выхода соединены с сумматорами кодов приращения частоты изменения фазы, входы сумматоров кодов соединены с выходом реги-30 стра изменения частоты, входы сумматоров кодов изменения фазы соединены с выходом регистра изменения фазы, выход генератора тактовых импульсов соединен, с одним из входов счетчика 35 команд, а выходы сумматоров кодов приращения частоты-и сумматоров кодов изменения фазы соединены с входами соответствующих элементов И, выходы которых объединены попарно и являют- 40 ся выходами блока управления.
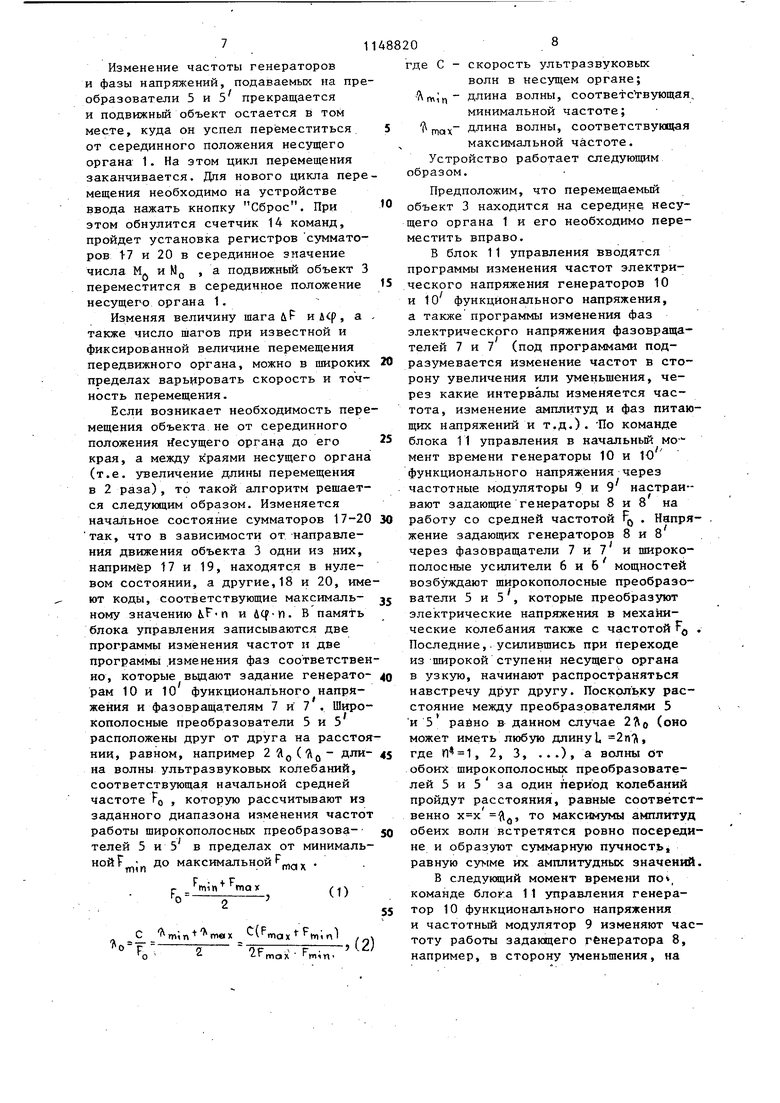
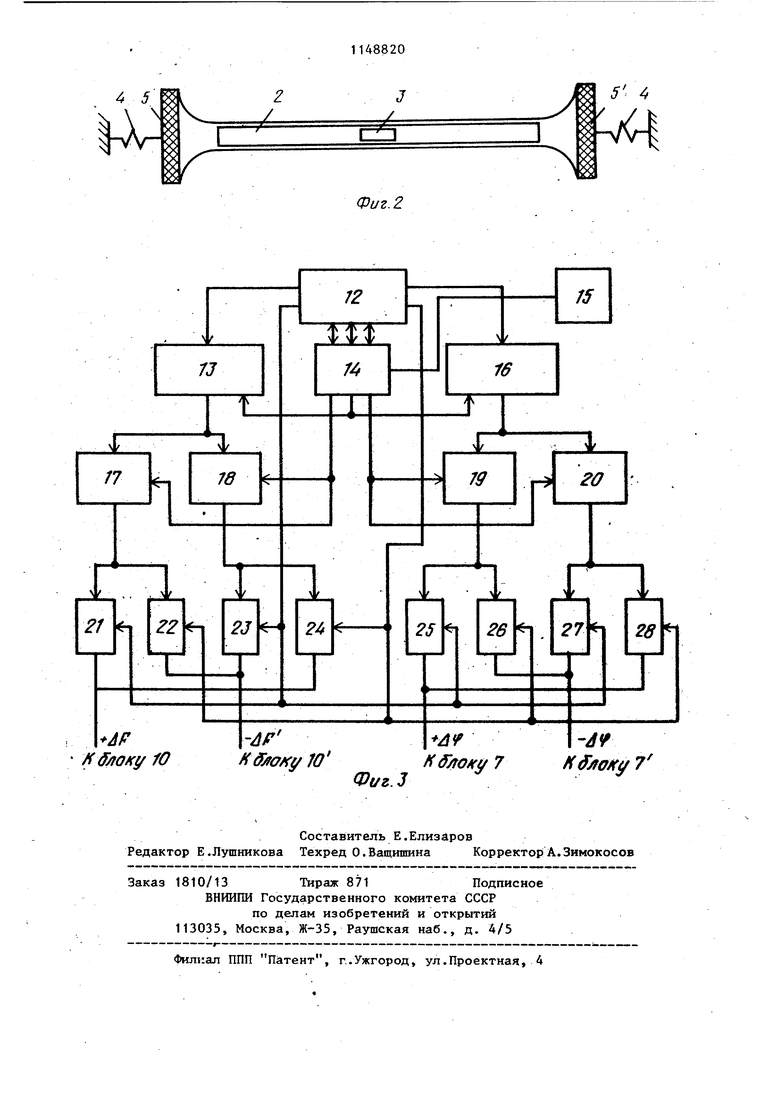
На фиг. 1 изображено устройство; на фиг. 2 - колебательная система устройства, вид сверху; на фиг. 3 функциональная схема блока управпе- 45
НИН. Устройство содержит несущий орган 1 с продольным пазом 2, в котором размещен перемещаемый объект 3, амортизаторы 4, широкополосные преобразб-50 ватели 5 и 5 , жестко прикрепленные к противоположньм торцам несущего органа 1 и подключенные каждый соответственно через широкополосные усилители 6 и 6 мощности и фазовраща- 55 тели 7 и к задающим генераторам 8 и 8 , соединенным через частотные модуляторы 9 и 9 и генераторы .10
и 10 функционального напряжения с блоком 11 управления. Широкополосные усилители 6 и 6 мощности вьтолнены по известным схемам. Задающие генераторы 8 и 8 представляют собой генераторы синусоидального напряжения и также вьтопнены по известным традиционным схемам. Фазовращатели 7 и вьшолнены на инверторах, в которых между коллекторной и эмиттерной нагрузками включена RC цепь, причем в качестве управляемого сопротивления используется либо переход сток - исток полевого транзистора, на затвор которого подается управляющее напряжение, либо преобразователь код - сопротивление, на который подается цифровой код от блока управления .
В качестве частотных модуляторов и 9 могут использоваться, например, варикапы, включенные в колебательный контур задающего генератора. На входы варикапов для изменения их емкости от генератора функциональных напряжений подаются смещающиеся постоянные напряжения.
В качестве генераторов 10 и 10 функционального напряжения используются аналоговые устройства, в которых выходные напряжения изменяются в зависимости от времени по заранее выбранному закону (линейная зависимость, квадратичная, кубическая или любая другая более сложная зависимость) . Форма зависимости oпpeдeляetся видом перемещения микрообъектов линейное, равноускоренное и т.д. вьтолнения таких функций генераторы функционального напряжения состоят из задакнцих генераторов пилообразного линейного напряжения, функциональных преобразователей, выполненных на операционных усилителях с нелинейной обратной связью или выполненных на пассивных резисторноДйодных цепочках и усилителях постоянного напряжения. Наиболее широкими возможностями обладают цифровые генераторы функционального напряжения, которые включают прЪграммный блок и цифроаналоговый преобразователь (ЦАП).
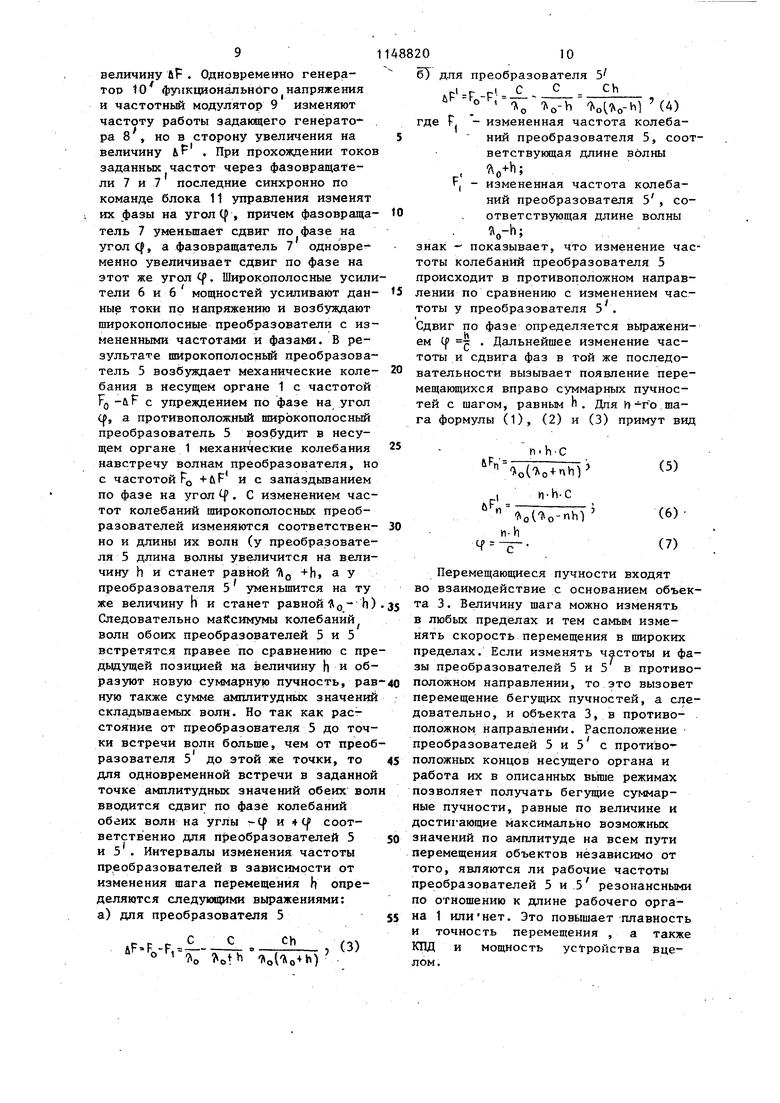
По заранее введенной программе с выхода программного блока управления на вход ЦАП подаётся цифровой код, который и определяет временную зависимость выходного постоянного напряжения ЦАП по любому закону. В последукнцем это напряжение подается на частотный модулятор. Блок управления состоит из устрой ства 12 ввода, регистра 13 изменения частоты, счетчика 14команд, генератора 15 тактовьр: импульсов, регистра 16 изменения фазы, сзгмматоров 17 и 18 кодов приращения частоты, сум маторов 19 и 20 кодов изменения фазы логических схем И 21 - 28. Из пульта устройства 12 ввода производится набор следующих команд: а) направление перемещения вправо или влево, при этом если движение вправо, то с выхода устройства вво да подается напряжение на управляющие входы схем И 21, 23, 25 и 27,, а если движение влево, то управлящее напряжение rfoдaeтcя на входы схем И 22, 24, 26, и 28} б) вьЮор количества шагов, которое затем зано сится в счетчик 14 команд; в) выбор величины изменения шага частоты &F и шага фазы uCf, которые затем подаются в регистры 13 и 16 соответствен но; г) установка начального значения состояния сумматоров 17-20; д) сброс в. нулевое состояние всех блоков. I Установка начального состояния регистров сумматоров 17 и 18 в среднее значение по величине кода необхо дима для того, чтобы зафиксировать работу устройства перемещения. При этом движение перемещаемого объекта 3 по несущему органу I всегда начинается от среднего положения, а затем происходит либо вправс либо- влево. УстройсФво работает следующим образом. Перед началом движения производит ся установка всех блоков в исходное состояние, например, кнопкой из устройства 12 ввода. При этом в регистpax сумматоров 17-19 устанавливают коды, соответствуилцие серединным значениям произведений Мл f uF N и «о Г1 (величина iF и л( набирается на пульте устройства 12 ввода, при этом перемео(авмый объект 3 будрт находиться по середине несущего орга на 1 и частота генератора 8 io« равна частоте fg генератора 8. Затем нажимается кнопка движения вправо или влево, при этом управляющее напряжение подается на входы : схем И 22, 23, 25 и 27 или 22, 24, 1 .026 тл 28. Вводится также с пульта устройства 12 ввода число шагов (1 которое записывается в счетчик 14 команд. В дальнейшем из устройстна 12 ввода производится пуск устройства в целом, и на установочный вход счетчика 14 команд подается сигнал на его открытие. На вход счетчика 14 команд начинают поступать импульсы от генератора 15 тактовых импульсов, которые синхро.низируют работу блока зт1равления. Счетчик 14 команд вырабатывает команды на перенос кода изменения частоты uF из регистра 13 и кода измен ения фазы iCj из регистра 16 в сумматоры 17-20. При этом сумматоры 17 и 19 суммируют поступающие коды с начально установленными, а сумматоры .18 и 20 вычитают коды из начально установленных кодов (сложение прямого кода одного числа с обратньм кодом другого). Таким образом, если до прихода первого кода на сумматорах 17-20 исходные коды были одинаковые, то при работе устройства они изменяются так, что в сумматорах 17 и 19 происходит увеличение числа Mg + ftF-n; М +йСрп, а на сумматоры 20 - уменьшение числа Mjj-uFifj и NO 1. Коды с сумматоров 17 и 18 через открытые схемы И (21, 23 или 22, 24) подаются на вход генераторов 10 и 10 функционального напряжения и изменяют частоты генераторов 8 и 8 от среднего значения ig io2 противоположных направлениях. Аналогично коды с сумматоров 18 и 20 и через открытие схемы И (25, 27 или 26, 28) подаются на вход 7 и 7 фазовращателей и изменяют фазы подаваемых напряжений на преобразователи 5 и 5 от среднего значения if в противоположных направлениях. Подвижный объект 3 перемещается по несущему органу 1 до тех пор, пока происходит изменение кодов на сумматорах 17-20. Импульсы от генераторов 15 заполняют счетчик числа шагов счетчика 14 команд и при заполнении счетчика шагов прекращается доступ синхронизирующих импульсов на счетчик 14 команд, при этом прекращается периодический перенос значений кодов ьр и fiq регистров 13 и 16 в накопительные и вычислительные сумматоры 17-20. Изменение частоты генераторов и фазы напряжений, подаваемых на пре образователи 5 и З прекращается и подвижный объект остается в той месте, куда он успел переместиться от серединного положения несущего органа 1. На этом цикл перемещения заканчивается. Дпя нового цикла пере мещения необходимо на устройстве ввода нажать кнопку Сброс. При этом обнулится счетчик 14 команд, пройдет установка регистров сумматоров 1-7 и 20 в серединное значение числа М.. и MO , а подвижный объект 3 переместится в серединное положение несущего органа 1. Изменяя величину шага &Р и , а также число шагов при известной и фиксированной величине перемещения передвижного органа, можно в широких пределах варь 1ровать скорость и точность перемещения. Если возникает необходимость пер мещения объекта не от серединного положения Несущего органу до его края, а между краями несущего органа (т.е. увеличение длины перемещения в 2 раза), то такой алгоритм решает ся следующим образом. Изменяется начальное состояние сумматоров 17-20 так, что в зависимости от направления движения объекта 3 одни из них, например 17 и 19, находятся в нулевом состоянии, а другие,18 и 20, име ют коды, соответствующие максимальному значению Fn и . В память блока управления записываются две программы изменения частот и две программы изменения фаз соответствен но, которые вьздают задание генераторам 10 и 10 функционального напряжения и фазовращателям 7 и 7 . Широ кополосные преобразователи 5 и 5 расположены друг от друга на рассто нии, равном, например 2 й, (Д - дли на волны ультразвуковых колебаний, соответствующая начальной средней частоте FO которую рассчитывают из зада нного диапазона изменения часто работы широкополосных преобразова- 5 и 5 в пределах от минималь до максимальной Р г max Гл С ( 20 С - скорость ультразвуковых волн в несущем органе; длина волны, соответствующая, минимальной частоте; | max длина волны, соответствунщая максимальной частоте. Устройство работает следующим образом. Предположим, что перемещаемый объект 3 находится на середине несущего органа 1 и его необходимо переместить вправо. В блок 11 управления вводятся программы изменения частот электрического напряжения генераторов 10 и 10 функционального напряжения, а также программы изменения фаз электрического напряжения фазовращателей 7 и 7 (под программами подразумевается изменение частот в сторону увеличения или уменьшения, через какие интервалы изменяется частота, изменение амплитуд и фаз питающих напряжений и т.д.). По команде блока 11 управления в начальный мо-мент времени генераторы 10 и 10 функционального напряжения через частотные модуляторы 9 и 9 настраивают задающие генераторы 8 и В на работу со средней частотой FQ . Напряжение задающих генераторов 8 и 8 через фазовращатели 7 и и широкополосные усилители 6 и 6 мощностей возбуждают широкополосные преобразователи 5 и 5 , которые преобразуют электрические напряжения в механические колебания также с частотой F , Последние,.усилившись при переходе из широкой ступени несущего органа в узкую, начинают распространяться навстречу друг другу. Поскольку расстояние между преобразователями 5 и 5 раёно в данном случае (оно может иметь любую длину, 2пА, где П 1, 2, 3, ...), а волны Ст обоих широкополосных преобразователей 5 и 5 за один период колебаний пройдут расстояния, равные соответственно , то максимумы амплитуд обеих волн встретятся ровно посередине и образуют суммарную пучность, равную сумме их амплитудных значений. В следукядий момент времени по, команде блока 11 управления генератор 10 функционального напряжения и частотный модулятор 9 изменяют частоту работы задающего генератора 8, например, в сторону уменьшения, на величину uF . Одновременно генератор 10 фуикциональнЬго напряжения и частотный модулятор 9 изменяют частоту работы задающего генератора 8 но в сторону увеличения на величину iP . При прохождении токов заданных частот через фазовращатели 7 и 7 последние синхронно по команде блока 11 управления изменят . их фазы на угол ( , причем фазовращатель 7 уменьшает сдвиг по фазе на угол Cf, а фазовращатель 7 одновременно увеличивает сдвиг по фазе на этот же угол Cf. Широкополосные усили тели 6 и 6 мощностей усиливают Данные токи по напряжению и возбуждают широкополосные преобразователи с измененными частотами и фазами. В результате широкополосный преобразователь 5 возб -ждает механические колебания в несущем органе 1 с частотой Fg -uF с упреждением по фазе на угол ср, а противоположный широкополосный преобразователь 5 возбудит в несущем органе 1 механические колебания навстречу волнам преобразователя. Но с частотой FO +uF и с запаздьгоанием по фазе на угол , С изменением частот колебаний широкополосных преобразователей изменяются соответственно и длины их волн (у преобразователя 5 длина волны увеличится на величину h и станет равной +h, ay преобразователя 5 з еньшится на ту же величину h и станет равной g-h) Следовательно максимумы колебаний волн обоих преобразователей 5 и 5 встретятся правее по сравнению с пре дьщущей позицией на величину h и образуют новую суммарную пучность, рав ную также сумме амплитудных значений складьшаемых волн. Но так как расстояние от преобразователя 5 до точки встречи волн больше, чем от преобразователя 5 до этой же точки, то 45 для одновременной встречи в заданной точке амплитудных значений обеих в вводится сдвиг по фазе колебаний обеих волн на углы (j и +С соответственно для преобразователей 5 и 5 . Интервалы изменения частоты преобразователей в зависимости от изменения шага перемещения h опре деляются следукицими выражениями: а) для преобразователя 5 iP-Fo-F, fК () бУ для преобразователя 5 pt.r- г . С . ьр N-TT- ;г-:т: Т о-ЬЧо о- () где Г. - измененная частота колебаний преобразователя 5, соответствующая длине волны . г, - измененная частота колебаний преобразователя 5, соответствующая длине волны знак - показывает, что изменение частоты колебаний преобразователя 5 происходит в противоположном направлении по сравнению с изменением частоты у преобразователя 5 . Сдвиг по фазе определяется выражением tf . Дальнейшее изменение частоты и сдвига фаз в той же последовательности вызывает появление перемещающихся вправо суммарных пучностей с шагом, равным h. Для И-го. шага формулы (1), (2) и (3) примут вид ( pl П-h-C ) n.Vi q -. Перемещающиеся пучности входят во взаимодействие с основанием объек - Величину шага можно изменять в любых пределах и тем самьм изменять скорость перемещения в широких пределах. Если изменять частоты и фазы преобразователей 5 и 5 в противоположном направлении, то это вызовет перемещение бегущих пучностей, а следовательно, и объекта 3, в противоположном направлении. Расположение преобразователей 5 и 5 с противоположных концов несущего органа и работа их в описанных вьш1е режимах позволяет получать бегущие суммарные пучности, равные по величине и достигающие максимально возможных значений по амплитуде на всем пути перемещения объектов независимо от того, являются ли рабочие частоты преобразователей 5 и 5 резонансными по отношению к длине рабочего органа 1 илинет. Это повышает плавность и точность перемещения , а также КПД и мощность устройства вцелом. 5:
Фиг.2 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ БЛОКА | 0 |
|
SU365004A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке 2997693/03, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
