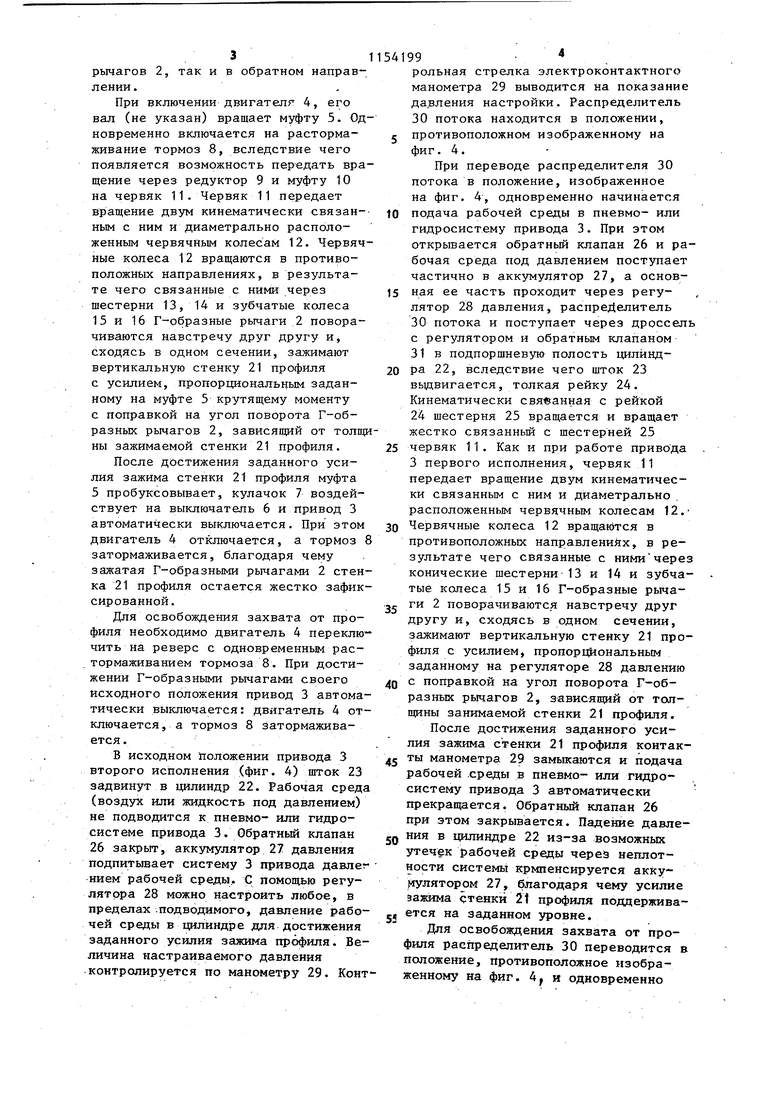
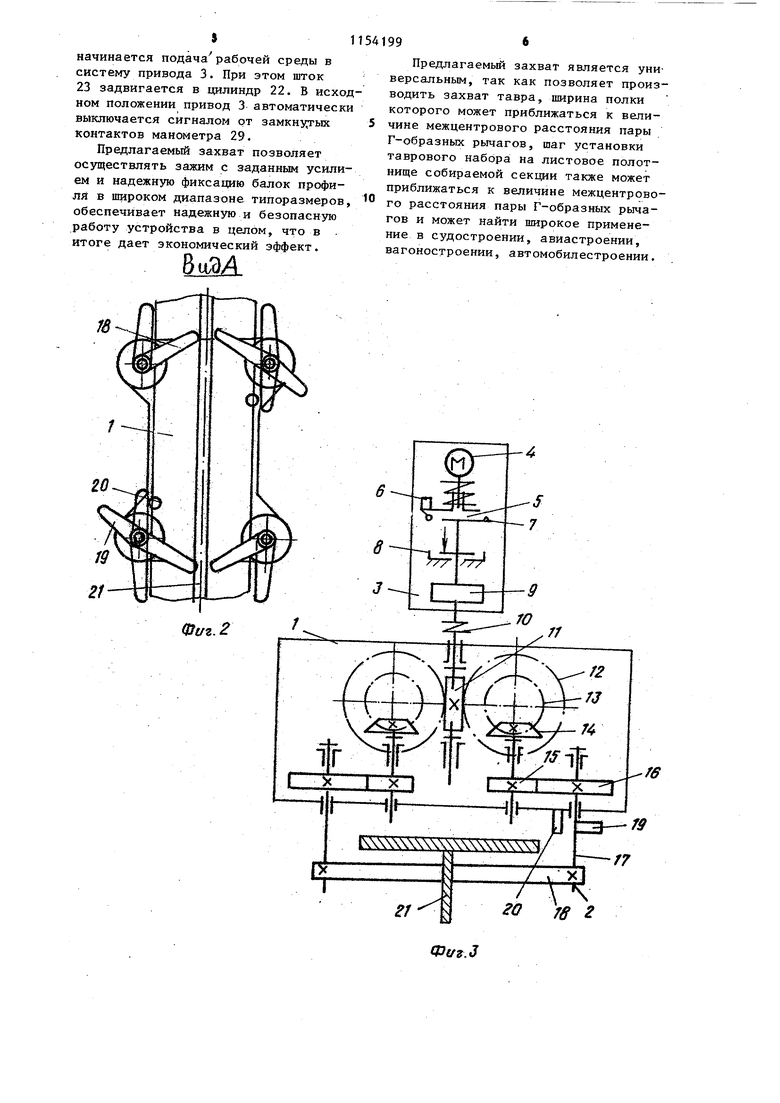
Изобретекче относится к машиностроению и может быть использовано, например, для установки профильного набора на листовое полотнище при сборке оребренных панелей и сек ций в судостроении. Цель изобретения - расширение номенклатуры захватьгааемьк профилей На фиг. 1 изображен предпагаемьй захват для профиля, общий вид; на фиг. 2 - вид А на фиг. 1i на фиг. 3 кинематическая схема пары рычагов предлагаемого захвата с приводом от механического ключа; на фиг. 4 кинематическая схема пары рычагов предлагаемого захвата с приводом от цилиндра. Захват для профиля, навешиваемьй на штангу транспортно-установочного агрегата (условно не показан), содержит корпус 1, в котором установлены две пары Г-образных рычагов 2 с приводом 3 их синхронного поворот Привод 3 может быть вьшолнен в виде моментного электро-, гидроили пневмомеханического ключа типа гайковерта (фиг. 3), включающего электро-, гидро- или пневмодвигател 4, на приводной вал которого посажена муфта 5 предельного момента с возможностью регулировки величины предельного момента, на одной из полумуфт (не указана) которой закреплен выключатель 6, а на другой управляю1чий кулачок 7. Привод 3 включает также дисковый Тормоз 8, использую1Щ1й для питания тот же ВИД энергии, что и двигатель 4 и редуктор 9. Тихоходный вал редуктора 9 соеди нен упругой муфтой 10 с червяком 11 находящимся в зацеплении с двумя диаметрально расположенными червячнымя колесами 2, Па валу каждого червячного колеса 12 жестко посажена коническая шестерня 13, которая кинематически связана через коничес кую шестерню 14, зубчатые колеса 15 и 16 с вертикальным плечом 17 Г-образного рычага 2. Горизонтальное плечо 18 каждого Г-образного рычага 2 выполнено в плане на конце скругленным и с длиной равной или больше половины расстояния между парой этих рычагов и жестко связано с вертикальным пле чом 17. 9 Для фиксации захвата в раскрытом положении вертикальное плечо 17 одного из пары Г-образного рычага 2 снабжено выступом 19, взаимодействующим с упором 20, расположенным на корпусе 1 захвата. Стенка 21 захватываемого профиля расположена вертикально. Другим вариантом исполнения привода 3 (фиг. 4) может быть гидроили пневмоцилиндр 22, шток 23 которого шарнирно соединен с зубчатой рейкой 24, зацепляющейся с шестерней 25, которая жестко посажена на вал червяка 11, который, как и в первом исполнении привода в, кинематически связан с двумя червячными колесами 12. На валу каждого червячного колеса 12 жестко посажена коническая шестерня 13, которая кинематически связана через коническую шестерню 14, зубчатые колеса 15 и 16 с Г-образным рычагом 2. Гидро- или пневмосистема привода 3 такого исполнения вхслючает обратный клапан 26, аккзпмулятор 27 давления, регулятор 28 давления (редукционный клапан), электроконтактный манометр 29, распределитель 30 потока (управляющий золотник) дроссели с регуляторами и обратными клапанами (регуляторы объемного расхода) 31. Захват работает следующим образом. В исходном положении захват раскрыт, так как горизонтальные плечи 18 Г-образных рычагов 2 развернуты до положения взаимной параллельности (на фиг. 2 показано тонкими линияьт). Выступ 19, расположенньй на вертикальном плече 17 одного из пары Г-образного рычага 2 упирается в упор 20, располойсенный на корпусе 1 устройства, Стенка 21 захватываемого профиля располагается вдоль оси симметрии пар рычагов 2 (параллельно плечам 18). Двигатель 4 привода 3 первого исполнения (фиг. 3) отключен. Муфта 5 может быть настроена на любой из своего диапазона крутящий момент. Выключатель 6 не нажат кулачком 7, Тормоз 8, выбираемый по максимальному крутящему моменту муфты 5, находится в заторможенном состоянии и препятствует передаче крутящего момента, не превышающего тормозного момента, как со стороны двигателя 4 в сторону Г-образных
.3
рычагов 2, так и в обратном направлении.
При включении двигателе 4, его вал (не указан) вращает муфту 5. Одновременно включается на растормаживание тормоз 8, вследствие чего появляется возможность передать вращение через редуктор 9 и муфту 10 на червяк 11. Червяк 11 передает вращение двум кинематически связан-ным с ним и диаметрально расположенным червячйым колесам 12. Червячные колеса 12 вращаются в противоположных направлениях, в результате чего связанные с ними через шестерни 13, 14 и зубчатые колеса 15 и 16 Г-образные рычаги 2 поворачиваются навстречу друг другу и, сходясь в одном сечении, зажимают вертикальную стенку 21 профиля с усилием, пропорциональным заданному на муфте 5 крутящему моменту с поправкой на угол поворота Г-образных рычагов 2, зависящий от толпщны зажимаемой стенки 21 профиля.
После достижения заданного усилия зажима стенки 21 профиля муфта 5 пробуксовывает, кулачок 7 воздействует на выключатель 6 и привод 3 автоматически выключается. При этом двигатель 4 отключается, а тормоз 8 затормаживается, благодаря чему зажатая Г-образными рычагами 2 стенка 21 профиля остается жестко зафиксированной.
Для освобождения захвата от профиля необходимо двигатель 4 переключить на реверс с одновременным растормаживанием тормоза 8. При достижении Г-образными рычагами своего исходного положения привод 3 автоматически выключается: двигатель 4 отключается , а тормоз 8 затормаживается .
В исходном положении привода 3 второго исполнения (фиг. 4) щток 23 задвинут в цилиндр 22. Рабочая среда (воздух или жидкость под давлением) не подводится к пневмо- или гидросистеме привода 3. Обратный клапан 26 закрыт, аккумулятор 27 давления подпитьшает систему 3 привода давлег нием рабочей среды. С помощью регулятора 28 можно настроить любое, в пределах .подводимого, давление рабочей среды в цилиндре для достижения заданного усилия зажима профиля. Величина настраиваемого давления контролируется по манометру 29. Конт4199
рольная стрелка электроконтактного манометра 29 выводится на показание давления настройки. Распределитель 30 потока находится в положении,
с противоположном изображенному на фиг. 4.
При переводе распределителя 30 потока в положение, изображенное на фиг. 4, одновременно начинается
0 подача рабочей среды в пневмо- или гидросистему привода 3. При этом открьгоается обратный клапан 26 и рабочая среда под давлением поступает частично в аккумулятор 27, а основ-
5 ная ее часть проходит через регулятор 28 давления, распределитель
30потока и поступает через дроссель с регулятором и обратным клапаном
31в подпоршневую полость цилйнд0 ра 22, вследствие чего шток 23
вьщвигается, толкая рейку 24. Кинематически связанная с рейкой 24 шестерня 25 вращается и вращает жестко связанный с шестерней 25
5 червяк 11. Как и при работе привода 3 первого исполнения, червяк 11 передает вращение двум кинематически связанным с ним и диаметрально расположенным червячным колесам 12.
0 Червячные колеса 12 вращаются в
противоположных направлениях, в результате чего связанные с нимичерез конические шестерни 13 и 14 и зубчатые колеса 15 и 16 Г-образные рыча г ги 2 поворачиваются навстречу друг другу и, сходясь в одном сечении, зажимают вертикальную стенку 21 профиля с усилием, пропорциональным заданному на регуляторе 28 давлению
0 с поправкой на угол поворота Г-образных рычагов 2, зависящий от толщины занимаемой стенки 21 профиля. После достижения заданного усилия зажима стенки 21 профиля контакты манометра 29 замыкаются и подача рабочей .среды в пневмо- или гидросистему привода 3 автоматически прекращается. Обратный клапан 26 при этом закрывается. Падение давлеQ ния в цилиндре 22 из-за возможных згтечек рабочей среды через неплотности системь крмпенсируется акку(«улятором 27, благодаря чему усилие зажима стенки 2t профиля поддерживаJJ ется на заданном уровне.
Для освобождения захвата от профиля распределитель 30 переводится в положение, противоположное изображенному на фиг. 4, и одновременно
S1
начинается подачарабочей среды в систему привода 3, При этом шток 23 задвигается в цилиндр 22. В исход ном положении привод 3 автоматически выключается сигналом от замкнутых контактов манометра 29.
Предлагаемый захват позволяет осуществлять зажим с заданным усилием и надежную фиксацию балок профиля в широком диапазоне типоразмеров, обеспечивает надежную и безопасную работу устройства в целом, что в итоге дает экономический эффект.
8uM
54199
Предлагаемый захват является уни нереальным, так как позволяет производить захват тавра, ширина полки которого может приближаться к величине межцентрового расстояния пары Г-образных рычагов, шаг установки таврового набора на листовое полотнище собираемой секции также может приближаться к величине межцентрового расстояния пары Г-образных рычагов и может найти широкое применение в судостроении, авиастроении, вагоностроении, автомобилестроении. 7 го
Ф(/г.З те 2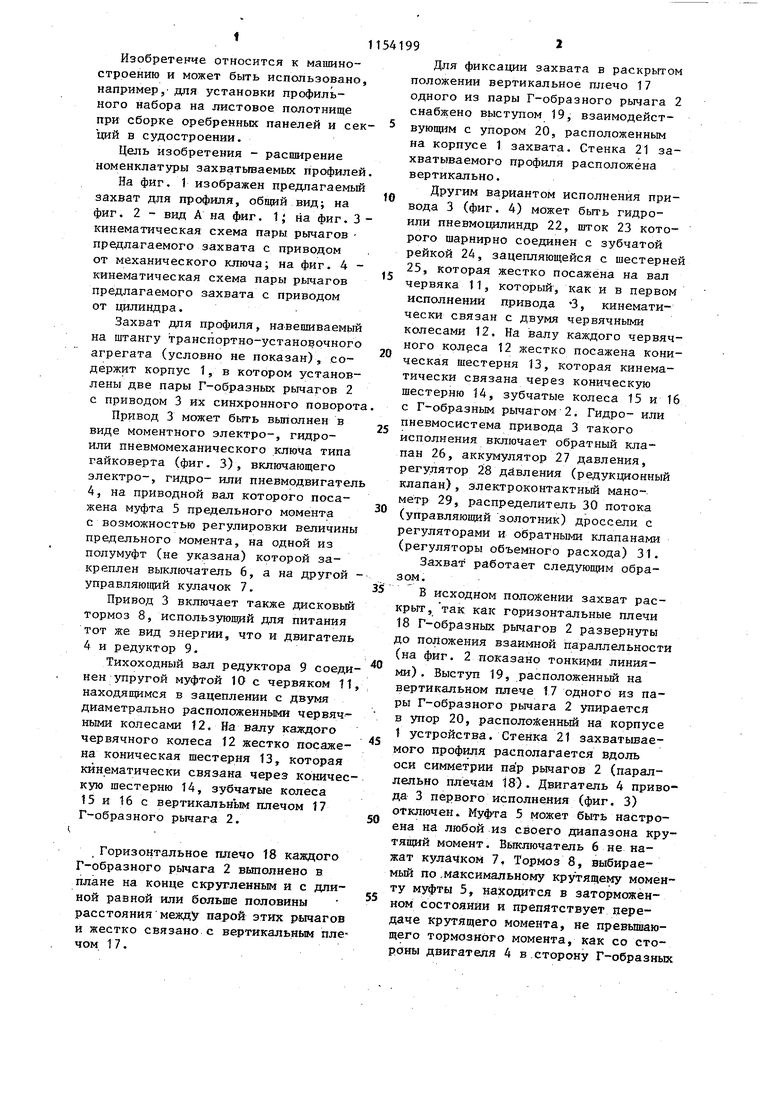
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| Прокатный стан | 1988 |
|
SU1600867A1 |
| РЕГУЛЯТОР ТОРМОЗА ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2398984C2 |
| Товарный регулятор ткацкого станка | 1982 |
|
SU1101484A1 |
| ГИДРОМЕХАНИЧЕСКИЙ ГРЕЙФЕР | 1999 |
|
RU2165386C2 |
| РЕГУЛЯТОР ТОРМОЗА ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2398986C2 |
| ТОВАРНЫЙ РЕГУЛЯТОР БЕСЧЕЛНОЧНОГО ТКАЦКОГО СТАНКА | 1994 |
|
RU2083738C1 |
| Устройство для уравновешивания рабочего валка | 1987 |
|
SU1424892A1 |
| РЕГУЛЯТОР ТОРМОЗА ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2398985C2 |
| РЕГУЛЯТОР ТОРМОЗА ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2398983C2 |
ЗАХВАТ ДЛЯ ПРОФИЛЯ, содержащий навепшваемый на грузоподъемный механизм корпус и установленные в нем с возможностью синхронного поворота от привода вокруг своих вертикальных стоек две пары Г-обраэных рычагов, отличающийся тем, что, с целью расширения иоменклатзфы захватываемых профилей, горизонтальное плечо каждого Г-образного рычага выполнено на конце в плане скругленным и с длиной, равной или большей половины межцентрового расстояния пары этих .рычагов. сл сл 4 со
| Захват для листовой стали | 1960 |
|
SU131480A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
