2. Устройство ПОП.1, отличающееся тем, что радиально расположенные скребковые лопатки вьтолнены из упругого материапа, а крепежнъй- узел скребковых лопаток имеет группу кронштейнов, смонтированных по периферии несущего диска, при этом
последний снабжен установленными на нем также по периферии опорными элементами, а скребковые лопатки скреплены одними концами с соответствующими кронштейнами и сопряжены центральным участком с опорными элементами.
1. УСТРОЙСТВО ДЛЯ ОЧИСТКИ ПОДВОДНОЙ ЧАСТИ ОБЪЕКТОВ, преимущественно корпусов судов, содержащее несущую раму по крайней мере с двумя очистными рабочими органами, имеющими установленные с возможностью вращения на осях щетки, кинематически связанные с двигателями их привода. iCF;7 a: fr q П -- 15 1Г.:.;,.п:.,., 13 Sasj:ifirri;E --;i а также рычаг, скрепленный одним концом с несущей рамой, а другим концом шарнирно связанный с опорным узг лом, расположенным на подвижном средстве, снабженном фиксиру сяцими элементами для крепления на стенках очищаемого объекта, отличающееся тем, что, с целью повышения его надежности при эксплуатации и качества очистки, фиксирующие элементы снабжены по крайней мере двумя вакуумными присосками, смонтированньтми на опорном узле, а каждая щетка имеет несущий диск, жестко связанный с валом соответствующего двигателя привода, и связанные с несущим диском посредством крепежного узла радиально расположенные скребковые лопатки, при этом ось враd щения несущего диска установлена с возможностью наклона под углом к опорной плоскости несущей рамы и снаб-гг жена узлом регулирования этого угла наклона. СП 00 со о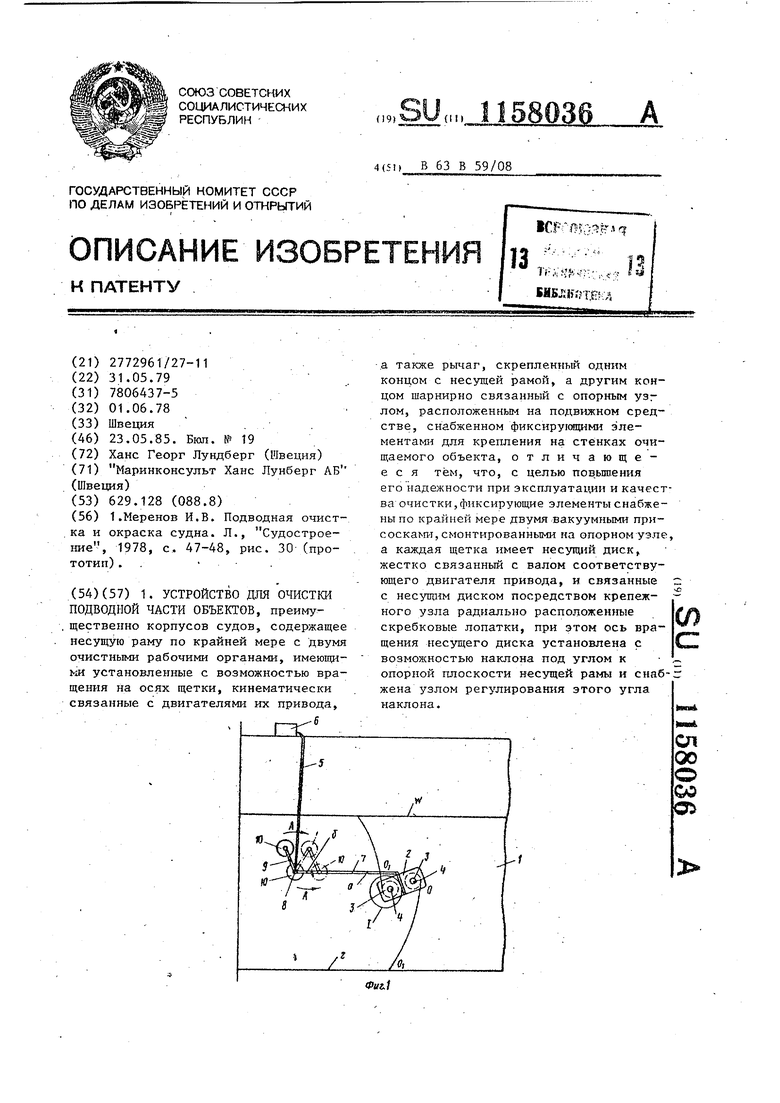
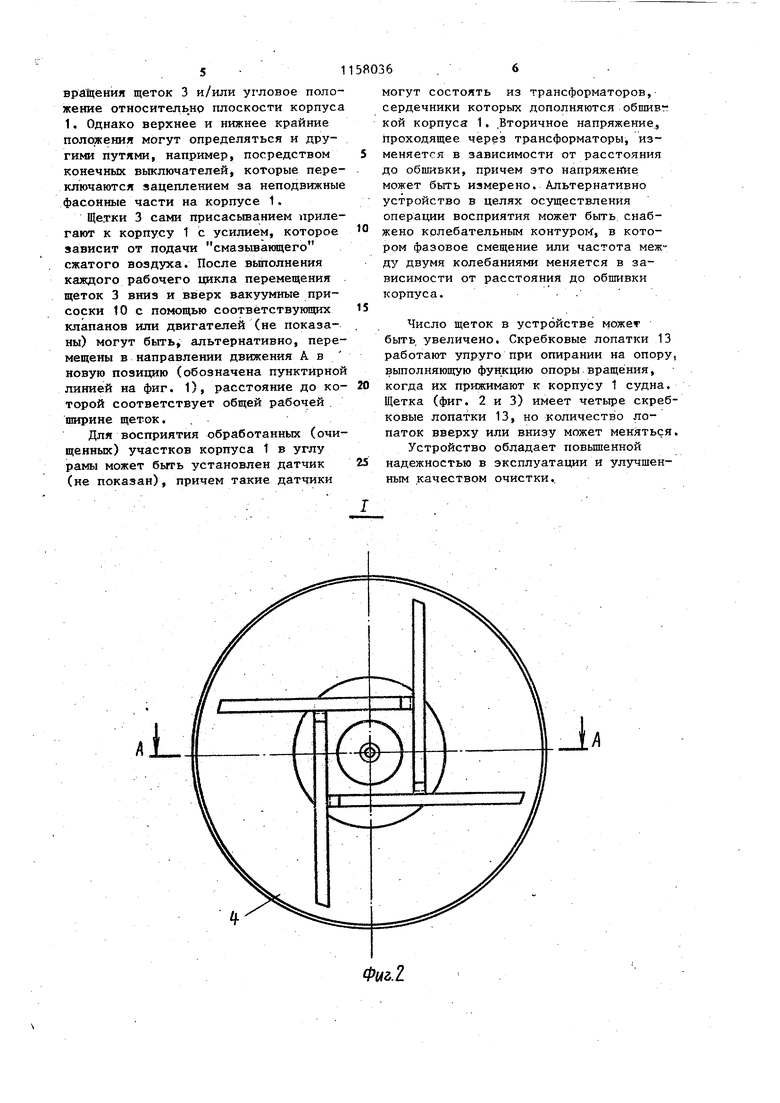
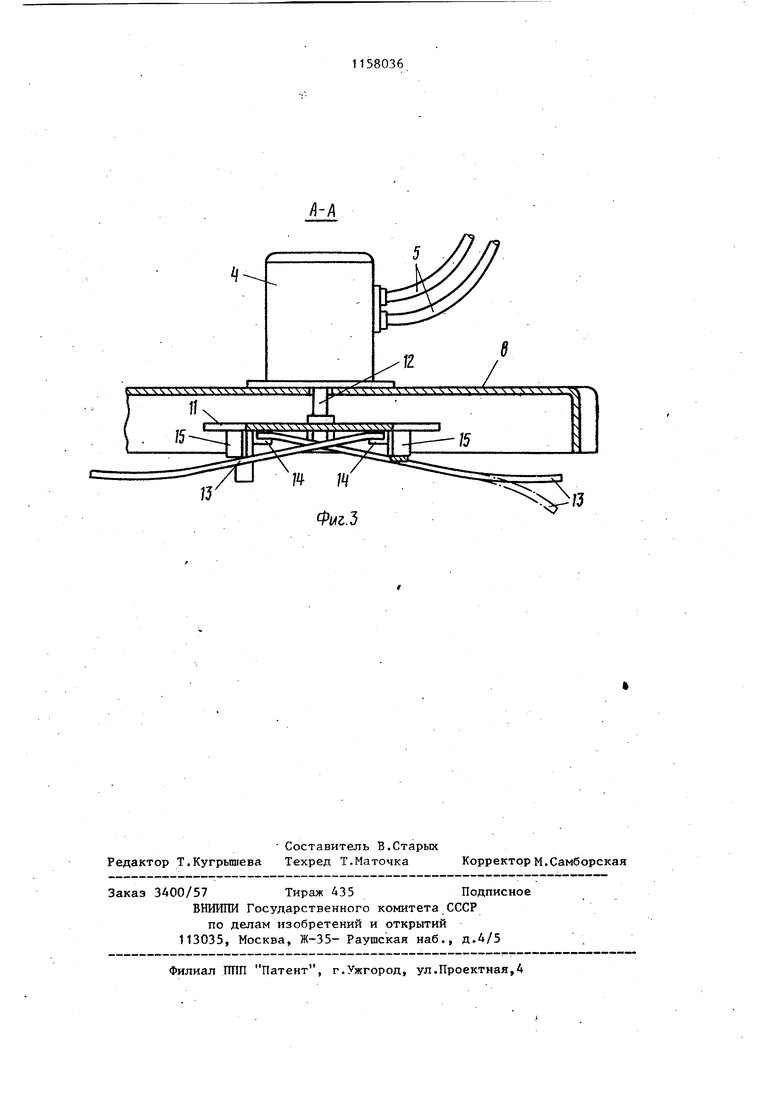
Изобретение относится к области эксплуатации ремонта флота, в частности к устройствам для очистки подводной части объектов, преи ущественно корпусов судов. Известно устройство для очистки подводной части объектов, преимущественно корпусов судов, содержащее несущую раму по крайней мере с двумя очистными рабочими органами, имеющими установленные с возможностью вращения на осях щетки, кинематически связанные с двигателями .их привода, а также рычаг, скрепленньй одним концом с несущей рамой, а другим концом шарнирно связанный с опорным узлом, расположенным на подвижном средстве, снабженном фиксирующими элементами для крепления на стенках очищаемого объекта 1 . Недостатками известного устройства являются малая надежность в эксплуатации и пониженное качество очис ки, Цель изобретения - повышение наде ности при эксплуатации устройства и качества очистки. Поставленная цель достигается тем, что в устройстве для очистки подводной части объектов, преимущественно корпусов судов, содержащее несущую раму по крайней мере с двумя очистными рабочими органами, имеющими установленные с возможностью вращения на осях щетки, кинематически связанные с двигателями их привода, а также рычаг, скрепленньй одним кон цом с несущей рамой, а другим концом шарнирно связанный с опорным узлом, расположенным на подвижном средстве снабженном фиксирующими элементами для крепления на стенках очищаемого объекта, фиксирующие элементы снабжены по крайней мере с двумя вакуумными присосками, смонтированными на опорном узле, а каждая щетка имеет несущий диск, жестко связанный с валом соответствующего двигателя привода, и связанные с этим несущим диском пос;редством крепежного узла радиально расположенные скребковые лопатки, при этом ось вращения несущего диска установлена с возможностью наклона под углом к опорной П.ПОСКОСТИ несущей рамы и снабжена узлом регулирования этого угла наклона. Кроме того, радиально расположенные скребковые лопатки выполнены из упругого материала, а крепежньй узел скребковых лопаток имеет группу кронштейнов, смонтированных по периферии несущего диска, при этом последний снабжен установленными на нем также по периферии опорными элементами, а скребковые лопатки скреплены одними концами с соответствующими кронштейнами и сопряжены центральным участком с опорными элементами. На фиг. 1 изображено устройство, вид сбоку; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - разрез А-А на фиг. 2. Устройство для очистки подводной части объектов, преимущественно корпусов 1 судов, от морской поросли, например водорослей, ракушки и т.д. содержит несущую раму 2 по крайней мере с двумя очистными рабочими органами, имеющими установленные с возможностью вращения на осях щетки 3, кинематически связанные с двигателями 4 их привода (гидравлическими, электрическими или пневматическими) . Двигатели 4 шпангами 5 соедииены г источником 6 питания, расположенным над ватерлинией W. В ycTtJOHCTBO входит также рычаг 7, скрепленньш одним концом t с несущей рамой 2, а другим концом сУ шарниром 8 связанный с опорным узлом - штангой 9, расположенной на подвижном средстве, снабженном фиксирующими элементами для крепления на стенках очищаемого объекта, выполненными в виде по крайней мере двух вакуумных присосок 10, Каждая щетка 3 содержит несущий диск 11, жестко связанный с валом 12 соответствующего двигателя 4 привода, и связанные с этим несущим диском поcperfcTBOM крепежного узла радиально расположенные скребковые лопатки 13 Ось вращения несущего диска 11 установлена с возможностью наклона под углом к опорной плоскости Ъ несущей рамы 2 и снабжена узлом регулировани - этого угла наклона (не показано). Радиально расположенные скребковые лопатки 13 выполнены из упругого материала, например, пружинящей стали а крепежный узел скребковых лопаток, включает группу кронштейнов 1Д,смонтированных по периферии неслтцего диска 11, при этом последний снабжен установленными на нем также по периферии опорными элементами 15, а скр ковые лопатки 13 скреплены одним концами с соответствующими кронштейнами 14 и сопряжены с центральным участком с опорными элементами 15. Устройство работает следующим образом. Рычаг 7 располагается горизонтал но в направлении вперед от щарнира т.е. в направлении дв шёния, и може вместе с рамой 2 и щетками 3, установленными на раме, совершать поворотные движения вверх и . Щетки 3 после вь полнения ими рабочего цик ла перемещения сверху, от ватерлинии W вниз, до уровня расположения выпуклости 1 подводной части судна, и снова вверх перемещаются вперед в направлении, указанном стрелкой А, на расстояние, соответствующее, например, рабочей ширине двух щеток 3. Работая таким образом, щетки 3 м гут обрабатывать следующр1е один за другим дугообразные участки или поверхности корпуса 1. Разграничитель ная линия между обработанным и необ рабйтанным участками корпуса показа с помощью дуги 0-0( . Поверхностный участок слева от дуги 0-0, следовательно, является обработанным, а участок справа от зтой дуги еще не обработан. Альтернативно щетки 3 во время вь 1 олнения ими пepeмeщe tvtй вверх и можно медленно перемещать вперед в направлении, указанном стрелко А. Поскольку правая щетка поднимается выше ватерлинии W, то это делает возможным осуществлять непрерывнь Й контроль за работой устройства с позиции, расположенной ватерлинии W, т.е. представляется возможность непрерывно следить за тем, чтобы щетки не пропустили, оставив необработанным, какой-либо участок корпуса 1 или не o6pa6aTb Baj n одиг и тот же участок несколько раз. . . Для осуществления перемещения щеток 3 вверх и вниз меткду позициями щетки 3 должны вращаться так, чтобы в их крайних позициях происход шо изменение направления враще ия щеток w. они при вводе их в соприкосновение с корпусом 1 могл приводить в движение вверх-вниз раму 2 и вместе с цей рычаг.7, Дополнительно или альтернативно к устройству в нем может быть предусмотрено регулирование угла наклона щеток 3 по отношению к плоскости корпуса 1 с тем, чтобы щетки могли плотнее прилегать к корпусу одним участком их пер 1ферии и создавать таким образом движущую силу, направленную вверх или вниз. Предполагаемая линия, соединяюща) центры вращения этих двух щеток 3, образует с рычагом 7 угол порядка 30°. Этот угол необходим для того, чтобы щетки 3 в нижнем крайнем положении эффективно работали пер мещении вниз к днищу судна, не остя) ляя необработанных участков. Благод; ря наличию этого угла правая щетка, находясь в верхнем крайнем положенш заходит несколько вьщ1е за ватерлини W. Это облегчает ведение наблюдения за обработкой .поверхности с места, расположенного вьщ1е ватерлинии. Для определения верхнего и нижнего положений устройства рама 2 снаб жена датчиком давления (не показан), который, воспринимая максимальное давление (нижнее крайнее положение) и минимальное давление (верхнее кра нее положение), изменяет направление 5 вращения щеток 3 и/или угловое поло жение относительно плоскости корпус 1. Однако верхнее и нижнее крайние положения могут определяться и другими путями, например, посредством конечных выключателей, которые пере ключаются зацеплением за неподвижны фасонные части на корпусе 1. Щетки 3 сами присасьшанием приле гают к корпусу 1 с усилием, которое зависит от подачи смазывающего сжатого воздуха. После вьшолнения каждого рабочего цикла перемещения щеток 3 вниз и вверх вакуумные присоски 10 с помощью соответствующих клапанов или двигателей (не показаны) могут быть, альтернативно, перемещены в направлении движения А в новую позицию (обозначена пунктирной линией на фиг. 1), расстояние до которой соответствует общей рабочей ширине щеток. . Для восприятия обработанных (очищенных) участков корпуса 1 в углу рамы может быть установлен датчик (не показан), причем такие датчики 36 могут состоять из трансформаторов, сердечники которых дополняются обпшвг кой корпуса 1. Вторичное напряжение., проходящее через трансформаторы, изменяется в зависимости от расстояния до обшивки, причем это напряжение может быть измерено. Альтернативно устройство в целях осуществления операции восприятия может быть снабжено колебательным контуром, в котором фазовое смещение или частота между двумя колебаниями меняется в зависимости от расстояния до обшивки корпуса. . . Число щеток в устройстве может быть, увеличено. Скребковые лопатки 13 работают упруго при опирании на опору, выполняющую функцию опоры вращения, когда их прижимают к корпусу 1 судна. Щетка (фиг. 2 и 3) имеет четыре скребковые лопатки 13, но количество лопаток вверху или внизу может меняться. Устройство обладает повьшенной надежностью в эксплуатации и улучшенным качеством очистки.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Подводная очистка и окраска судна | |||
| Л., Судостроение, 1978, с | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
