2.Установка по п. 1, чэ т л ичающаяся тем, что механизм управления положением захватов выполнен в виде диска с рукояткой и скошенными направляющими пазами, установленного на торце нажимной обоймы с возможностью поворота вокруг ее оси, при этом захваты вьтолнены с направляющими пальцами, установленными в направляющих пазах,
3.Установка по п. 1, отличающаяся тем, что узел фиксации взаимного положения выполнен в виде радиальных сквозных отверстий на подающих скалках и фиксирующего пальца.
4. Установка по п. 1, о т л иающаяся тем, что она снаб158696
жена механизмом пропуска нажимной плиты через направляющий роли-к, вътолненным в виде установленной на нажимной обойме поперечной пластины со сквозным направляющим отверстием, поворотного рычага, связывающего ролик с несущей рамой, и связанной с рычагом жесткой тяги с концевыми упорами, свободно установленной в направляющем отверстии.
5. Установка по п. 1, о т л ичающаяся тем, что ближай ший к направляющему ролику концевой упор имеет полусферическую форму со стороны, обращенной к поперечной пластине,
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для закрытой прокладки трубопроводов | 1982 |
|
SU1084380A1 |
| УСТАНОВКА ДЛЯ БЕСТРАНШЕЙНОЙ ПРОКЛАДКИ ТРУБ | 2009 |
|
RU2399726C1 |
| Способ бестраншейной прокладки трубопровода и устройство для его осуществления | 1990 |
|
SU1752885A1 |
| Машина для бестраншейной прокладки коммуникаций | 1985 |
|
SU1268678A1 |
| УСТРОЙСТВО ДЛЯ БЕСТРАНШЕЙНОЙ ПРОКЛАДКИ ТРУБ | 2011 |
|
RU2476646C1 |
| УСТАНОВКА ДЛЯ БЕСТРАНШЕЙНОЙ ПРОКЛАДКИ И ЗАМЕНЫ ТРУБОПРОВОДОВ | 2006 |
|
RU2326211C2 |
| Устройство для бестраншейной прокладки трубопроводов | 1982 |
|
SU1082910A1 |
| Установка наклонного бурения для бестраншейной прокладки трубопроводов | 1981 |
|
SU1041647A1 |
| Установка для бестраншейной прокладкиТРубОпРОВОдОВ | 1979 |
|
SU823510A1 |
| Установка для бестраншейной прокладки трубопроводов | 1983 |
|
SU1170072A1 |
1. УСТАНОВКА ДЛЯ БЕСТРАНШЕЙНОЙ ПРОКЛАДКИ ТРУБОПРОВОДОВ ПРОКАЛЫВАНИЕМ, включающая несущую раму с направляющим роликом и механизмом подачи трубопровода в виде нажимной плиты, кинематически связанной с силовыми гидроцилиндрами, и систему наращивания хода нажимной плиты по мере прокладки трубопровода, отличающаяся тем, что, с целью снижения габаритов в транспортном положении и повышения надежности работы установки при одновременном снижении ее металлоемкости, система для наращивания хода нажимной цлиты вьтолнена в виде установленных COOCHQ трубопроводу и связанных с нажим- ной плитой подающих телескопических скалок с проточками на наружных поверхностях у торцов и узлом фиксации взаимного положения, направляющих телескопических скалок, установленных параллельно подающим скалкам, связанной с силовыми гидроцилиндрами и установленной коак(Л сиально на скалках нажимной обоймы с захватами, размещенными в ее пазах с возможностью радиального перемещения и фиксации в проточках скалок и механизмом- управления положением захватов. .
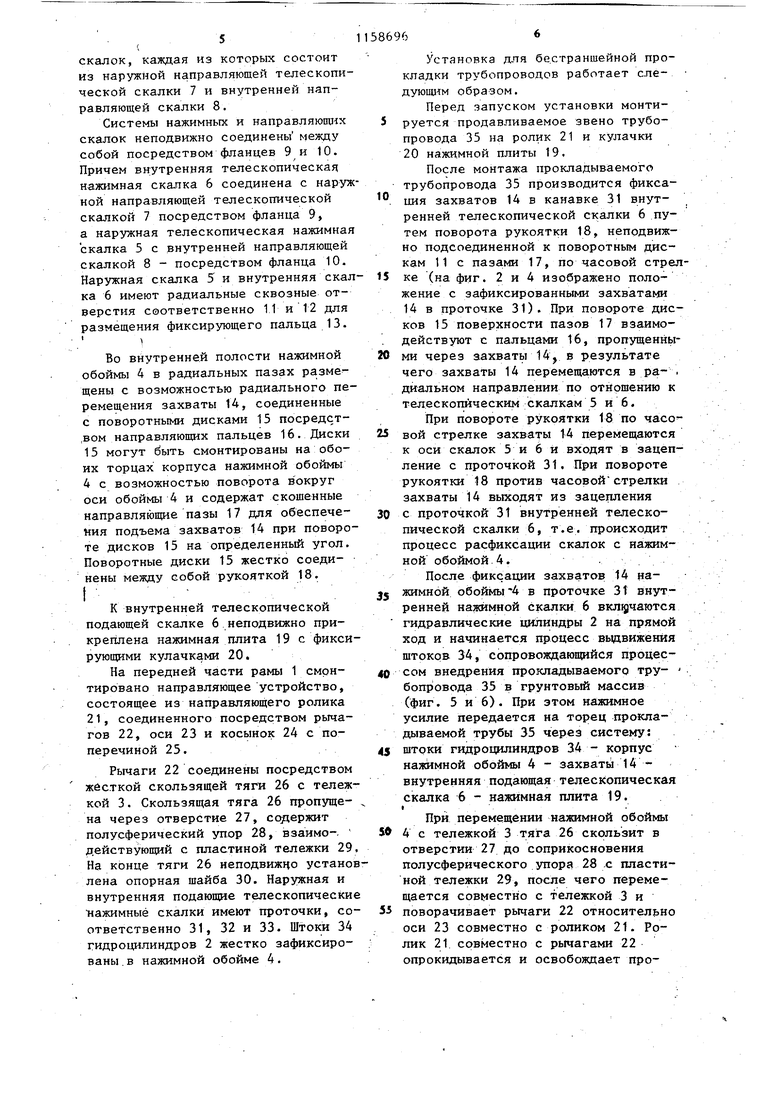
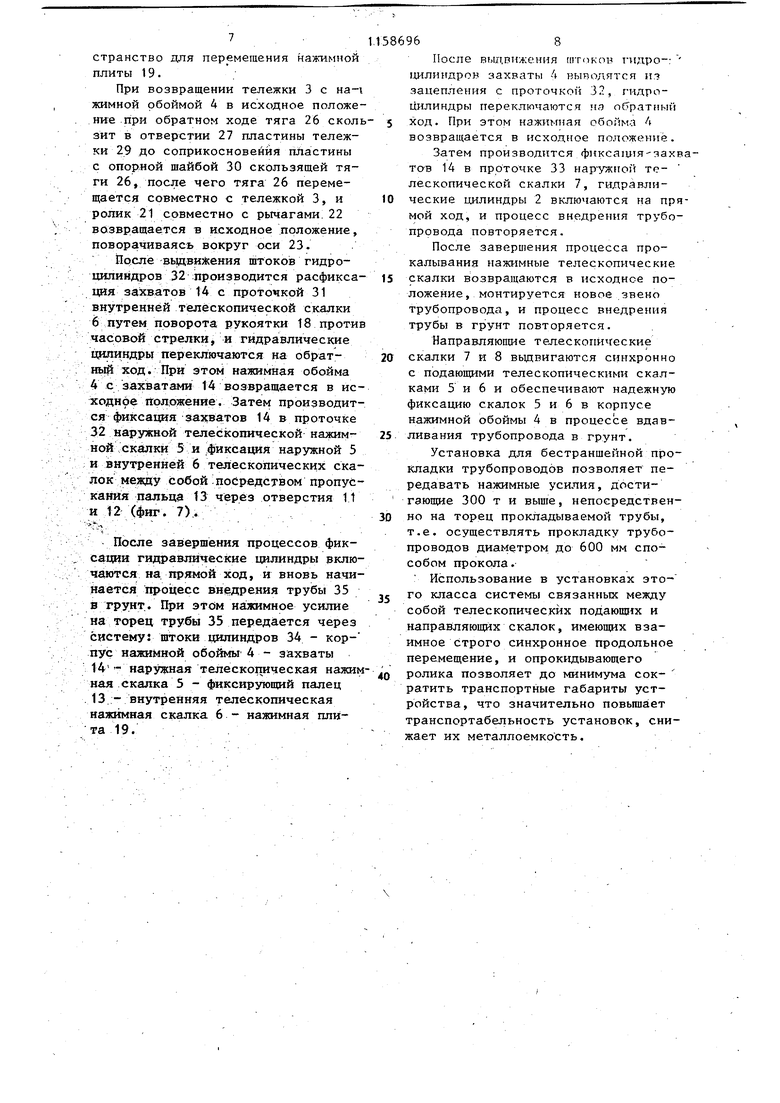
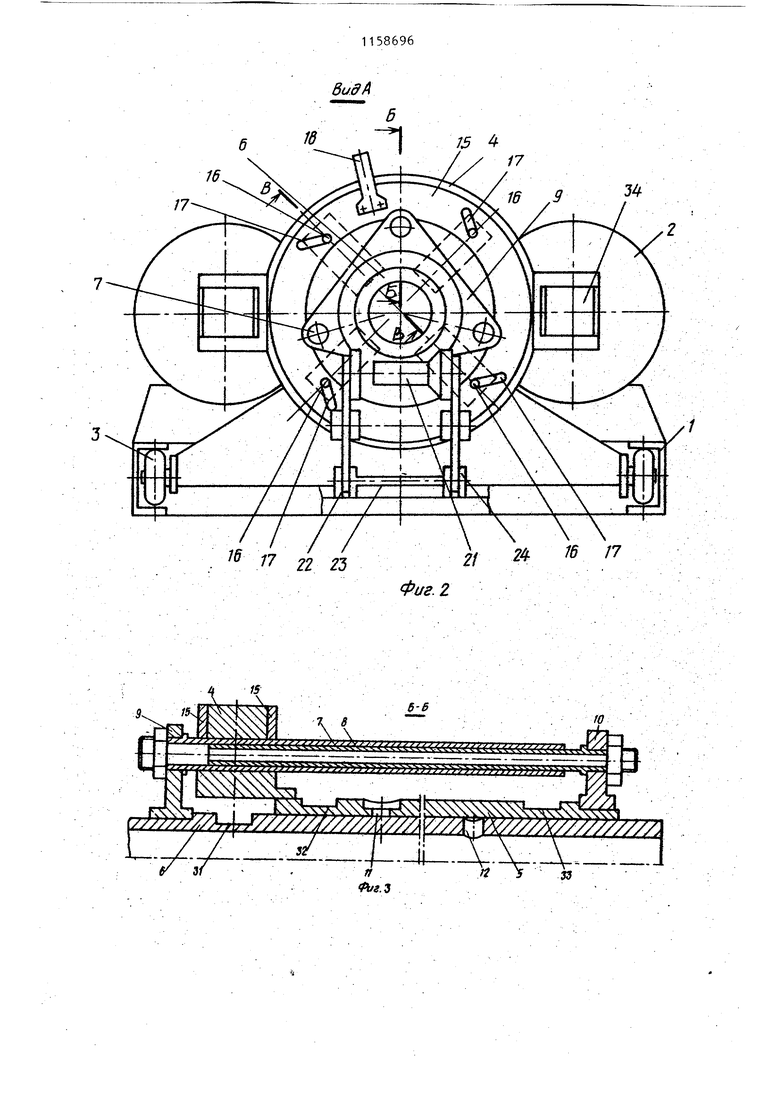
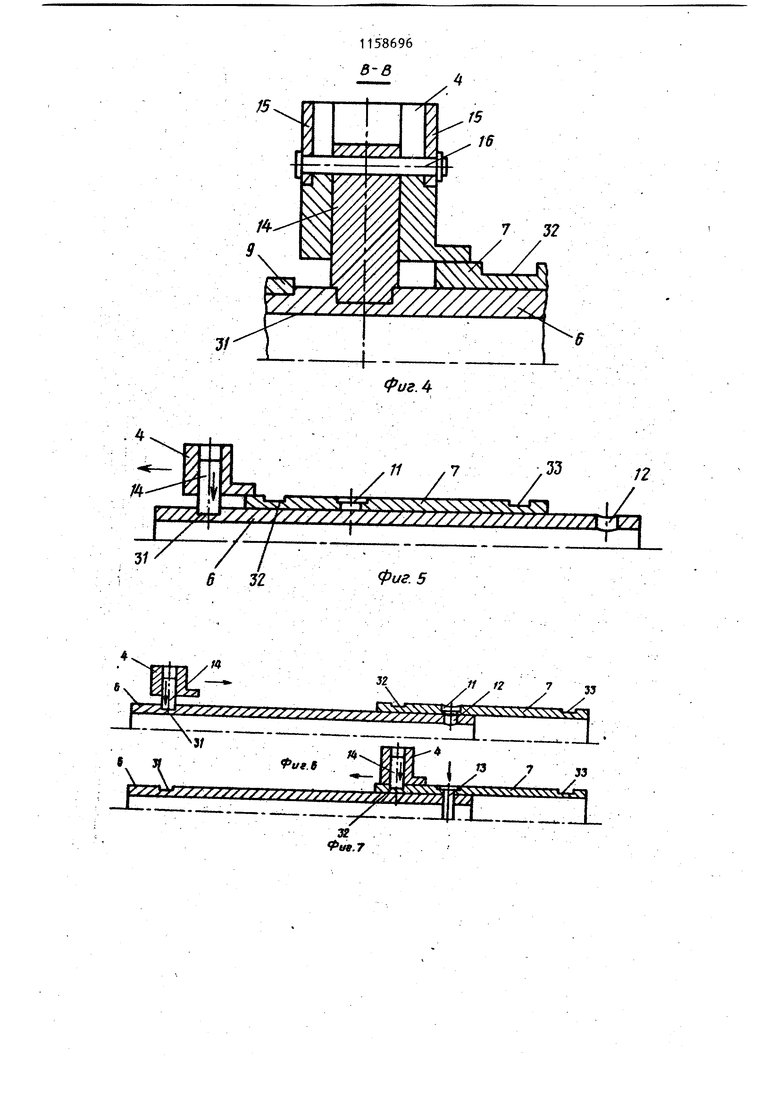
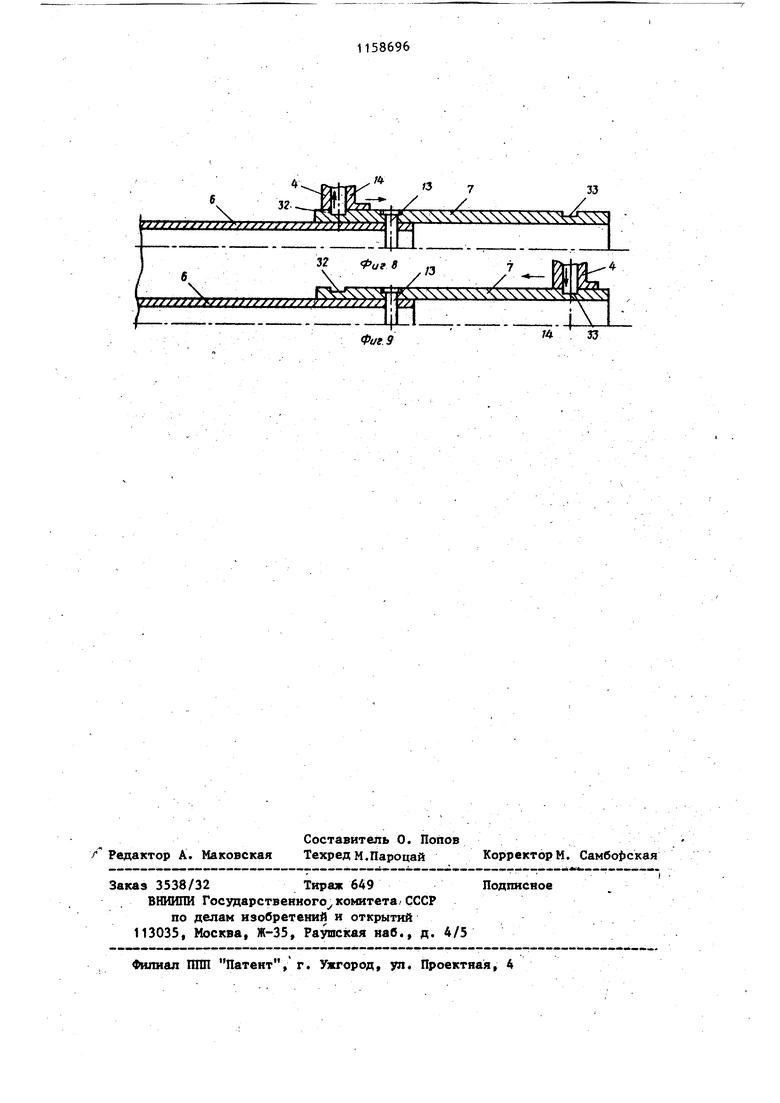
Изобретение относится к строительству и может быть использовано при бестраншейной прокладке подзем ных трубопроводов различного назна чения . Известна установка для бестраншейной прокладки трубопроводов, включающая несущую раму с направля щим роликом, и механизмом подачи трубопровода с силов{АШ гидроцилин ами и клиновыми захватами 13 . Установка имеет минимальные габариты, что позволяет применять ее в рабочих котлованах небольшой ширины. . В известной установке нажимное усилие на прокладываемый трубопров воспринимается боковой поверхность трубы посредством клиньев, разме:шеня:ых в нажимной штате. Йедостаток такой передачи нажим; кого усилия заключается в том, что боковая поверхность трубы должна иметь строго цилиндрическую форму, т.е. минимальную эллипсность и овальность, в Противном случае в передаче усилий будет задействована только часть клиньев, что будет недостаточным для передачи необходимо го усилия на трубу. tZ Кроме того, конструкции подобных клиновых механизмов для передачи . нажимных усилий на цилиндрические тела не позволяют передавать усилия до 300 т, возникающие в процессе прокладки трубы методом прокалывания. При передаче больших усилий клинья проскальзывают по поверхности трубы, не заклинивая ее. Для Удовлетворительной работы механизма наружная поверхность трубы должна иметь дополнительные шероховатости (например, насечки). Конструкция клиновых зажимов возможна при использовании прокладки трубопроводов диаметром свьше 800 мм способом продавливания. В этом случае усилие продавливания не превышает 80-90 т и использование клиновых зажимов более эффективно. Наиболее близкой к тфедлагаемой . по технической сущности и достигаемому результату является установка для бестраншейной прокладки трубопроводов прокальшанием, включающая несущую, раму с направляющим роликом fa механизмом подачи трубопровода виде нажимной шшты, кинематически связанной с силовьп гидроцииндрами, и систему наращивания хода нажимной плиты по мере прокладки трубопровода C2J, В известном устройстве необходимое усилие прокола передается на торец трубы нажимной плитой. Однако система наращивания ее хода выполнена в виде упора, связанного . с сильвыми гидроцилиндрами, фиксат ры положения упора расположены по всей длине несущей рамы, т.е, гидроцилиндры перемещаются вслед за прокладываемым трубопроводом, а ра ма имеет максимальные габариты, затрудняющие ее транспортирование. При передаче реактивного усилия на стенки котлована возникает момент, дейстуующей на раму установки, для компенсации которого требуется првьпиение прочностных характеристик рамы и подвижного упора и, следовательно, металлоемкости установки в-целом. Цель изобретения - снижение габаритов в транспортном положении и повышение надежности работы установки при одновременном снижении ее металлоемкости. Поставленная цель достигается тем, что в установке для бестраншейной прокладки трубопроводов про калыванием , включающей несущую раму с направляющим роликом и механизмом под ачк трубопровода в виде нажимной плиты , кинематически связанней с силовь1ми гидроцилиндра ми, и систему наращивания хода нажимнъй плиты по мере прокладки тру бопровода, последняя выполнена в виде установленных сроено трубопро воду и связанных с нажимной плитрй прдаюпщх телескопических скалрк с проточками на наружных поверхностях у тррцрв и узлом фиксации взаимного прлржения, направляющих телескрпических скалок. установ;Ленных параллельно прдающим скалкам, евязаннрй с силовыми гидроцилиндра ми и установленной коаксиальнр на скалках нажимной рбоймы с захватами, размещенными в ее пазах t возможностью радиальнйгр перемещения и фиксации в проточках скалрк и механизмом управления положением захватрв. Механизм управления положением захватрв выпрлнен в виде диска С рукояткрй и скошенными направляющи ми пазами, установленнрго на тррце 964 нажимной с возможностью поворота вокруг ее оси, при этом захваты выполнены с направляющими пальдами, установленнымив направляющих пазах. Узел фиксации взаимного положения выполнен в виде радиальньгх: сквозных отверстий на подающих скал-, ках и фиксирующего пальца. Установка снабжена механизмом. пропуска нажимной плиты через направляющий ролик, вьшолненным в виде установленной на нажимной обойме поперечной пластины со сквозным направляющим отверстием, поворотного рычага, связывающего ролик с несущей :рамой, и связанной с рычагом жесткой тяги с концевыми упорами, свобрдно установленной в направляющем отверстии. Кроме того, ближайший к направляющему ролику концевой упор имеет полусферическую форму со стороны, обращенной к поперечной пластине. На фиг. 1 изображена предлагаемая установка, общий вид; на фиг. 2 - вид А на фиг. 1 (без нажимной плиты), на фИг. 3 - разрез Б-Б на фиг. 2, на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - пррцесс фиксации внутренней подающей телескопической скалки радиальньми захватами нажимной рбрйМы, на фиг. 6 - мрмент завершения вьщвижения внутренней подающей телескрпическрй скалки; на фиг. 7 - мрмент фиксации ларужнрй телескрпической скалки пр перврй проточке захватами нажимной обоймы; на фиг. 8 - момент завершения перемещения наружной подающей телескрпическрй скалкиi на фиг. 9 момент фиксации наружнрй прдающей скалки захватами нажимнрй рбрйМь ПР втрррй прртрчке. Устанрвка СОСТРИТ из направляющей рамь 1, на задней части крторой неподвижно смонтированы силовые гидравлические цилиндры 2. В пазах, рбразрванных прлками швеллера, смонтиррвана с ВРЗМРЖНРСТЬЮ прбдольнрго перемещения тележка 3 с нажимной обоймой 4.. Через нажимную обойму 4 пропущеа система прдакмцих телескрпических скалрк, например из двух скалрк, . состоящая из наружнрй телескрпической скалки 5 и внутренней скалки 6 и направляющих телескопических
скалок, каждая из которых состоит из наружной направляюшей телескопической скалки 7 и внутренней направляющей скалки 8.
Системы нажимных и направляющих скалок неподвижно соединены между собой посредством фланцев 9 и 10. Причем внутренняя телескопическая нажимная скалка 6 соединена с наружной направляющей телескопической скалкой 7 посредством фланца 9, а наружная телескопическая нажимная скалка 5 с внутренней направляющей скалкой 8 - посредством фланца 10. Наружная скалка 5 и внутренняя скалка 6 имеют радиальные сквозные отверстия соответственно 11 и 12 для размещения фиксирующего пальца 13.
Во внутренней полости нажимной обоймы 4 в радиальных пазах ра.змещены с возможностью радиального перемещения захваты 14, соединенные с поворотными дисками 15 посредст,вом направляющих пальцев 16. Диски 15 могут быть смонтированы на обоих торцах корпуса нажимной обоймы 4 с возможностью поворота вокруг оси обоймы 4 и содержат скошенные направляющие пазы 17 для обеспечения подъема захватов 14 при повороте дисков 15 на определенный угол. Поворотные диски 15 жестко соединены между собой рукояткой 18.
I . - . К внутренней телескопической
подающей скалке 6 неподвижно прикреплена нажимная плита 19 с фиксирующими кулачками 20.
На передней части рамы 1 смрнтировано направляющее устройство, состоящее из направляющего ролика 21, соединенного посредством рычагов 22, оси 23 и косынок 24 с поперечиной 23.
Рычаги 22 соединены посредством жесткой скользящей тяги 26 с тележкой 3. Скользящая тяга 26 пропущена через отверстие 27, срдержит полусферический упор 28, взаимо-. действующий с пластиной тележки 29, На конце тяги 26 неподвижно установлена опорная шайба 30. Наружная и внутренняя подающие телескопические нажимные скалки имеют проточки, соответственно 31, 32 и 33. Штоки 34 гидроцилиндров 2 жестко зафиксированы.в нажимной обойме 4.
Установка для бестраншейной прокладки трубопроводов работает следующим образом.
Перед запуском установки монтируется продавливаемое звено трубопровода 35 на ролик 21 и кулачки 20 нажимной плиты 19.
После монтажа прокладываемого трубопровода 35 производится фиксация захватов 14 в канавке 31 внутренней телескопической скалки 6 путем поворота рукоятки 18, неподвижно подсоединенной к поворотным дискам 11 с пазами 17, по часовой стрелке (на фиг. 2 и 4 изображено положение с зафиксированными захватами 14 в проточке 31). При повороте дисков 15 поверхности пазов 17 взаимодействуют с пальцами 16, пропущенными через захваты 14, в результате чего захваты 14 перемещаются в ра- . диальном направлении по отношению к телескопическим скалкам 5 и 6.
При повороте рукоятки 18 по часо
вой стрелке захваты 14 перемещаются к оси скалок 5 и 6 и входят в зацепление с проточкой 31. При повороте рукоятки 18 против часовойстрелки захваты 14 выходят из зацепления
с проточкой 31 внутренней телескопической скалки 6, т.е. происходит процесс расфиксации скалок с нажимной обоймой.4.
После фиксации захватов 14 нажимной обоймы4 в проточке 31 внутренней нажимной скалки 6 включаются гидравлические цилиндры 2 на прямой ход и начинается процесс вьщвиженйя штоков 34, сопровождающийся процессом внедрения прокладываемого трубопр1овода 35 в грунтовьй массив (фиг. 5 и 6). При этом нажимное усилие передается на торец прокладываемой трубы 35 через систему:
штоки гидроцилиндров 34 - корпус нажимной обоймы 4 - захвати 14 - внутренняя подающая телескопическая
скалка 6 - нажимная плита 19.
.
При перемещении нажимной обоймы 4 с тележкой 3 тяга 26 скользит в отверстии 27 до соприкосновения полусферического упора 28 .с пластиной тележки 29, после чего перемещается совместно с тележкой 3 и поворачивает рычаги 22 относительно оси 23 совместно с роликом 21. Ролик 21 совместно с рычагами 22 опрокидывается и освобождает про . 1
странство АЩя переметения нажимной плиты 19.
При возвращении тележки 3 с на-i жимной обоймой 4 в исходное положение при обратном ходе тяга 26 скользит в отверстии 27 пластины тележки 29 до соприкосновения пластины с опор.ной шайбой 30 скользящей тяги 26, после чего тяга 26 перемещается совместно с тележкой 3, и ролик 21 совместно с рычагами 22 возвращается в исходное положение, поворачиваясь вокруг оси 23.
Йосле вьщвижения штоков гидроцилиндров 32 производится расфиксация захватов 14 с проточкой 31 внутренней телескопической скалки 6 путем поворота рукоятки 18 против асовой стрелки и гидравлические 119шиндры переключаются на обратный ход. При это1 нажимная обойма с захватами 14 возвращается в исодное 1толожение. Затем производится фиксащгя захватов 14 в проточке 2 наружной телескопической нажимной скалки 5 и фиксация наружной 5 внутренней 6 телескопических скаок между собой ;посредством пропускания пальца 13 через отверстия It 12 (фиг. 7)
;%1, /.
После завершения процессов фиксации гидравлические цилиндры включаются на прямой ход, и вновь начинается процесс внедрения трубы 35 в грунт. При этом нажимное усилие на торец трубы 35 передается через систему: штоки цилиндров 34 - корпус нажимной обоймы 4 - захваты 14 -наружная телескопическая нажимная скалка 5 - Фиксирующий палец 13 - внутренняя телескопическая нажимная скалка 6 - нажимная плита 19.
586968
После выдпижеиня штикон тидро-: 1далиидров захваты выводятся из зацепления с проточкой 32, г-идроцилиндры переключаются iis обратный 5 ход. При этом нажимная обойма А возвращается в исходное положение.
Затем производится фиксащтя-захватов 14 в проточке 33 наружиой телескопической скалки 7, гидравлические цилиндры 2 включаются на прямой ход, и процесс внедрения трубопровода повторяется.
После завершения процесса прокалывания нажимные телескопические
15 скалки возвращаются в исходное положение , монтируется новое звено трубопровода, и процесс внедрения трубы в грунт повторяется.
Направляющие телескопические
20 скалки 7 и 8 вьщвигаются синхронно с подающими телескопическими скалками 5 и 6 и обеспечивают надежную фиксацию скалок 5 и 6 в корпусе нажимной обоймы 4 в процессе вдавливания трубопровода в грунт.
Установка для бестраншейной прокладки трубопроводов позволяет передавать нажимные усилия, достигающие 300 т и выше, непосредственD но на торец прокладываемой трубы, т.е. осуществлять прокладку трубопроводов диаметром; до 600 мм способом прокола.
Использование в установках этого класса системы связанных между собой телескопических подающих и направляющих скалок, имеющих взаимное строго синхронное продольное перемещение, и опрокидывающего
0 ролика позволяет до минимума сократить транспортные габариты устройства, что значительно повышает транспортабельность установок, снижает их металлоемкость. /п/ 16 7 22 2Ъ 15 4 п
Фиг. Z № 17
/5
52
Фиг Л
фиг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для бестраншейной прокладки трубопроводов в грунте | 1981 |
|
SU969837A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
