ел
эо
ч СП У1
Изобретение относится к горной v промьшленности, в частности к управлению направленным движением горнопроходческих комплексов.
Известен способ управления направленным движением проходческого щита, закл1очаю1цийся в измерении отклонений ножевой и хвостовой точек продольной оси щита от заданного направления в плане и профиле, определеНИИ маркшейдером необходимой для продвига совокупности Номеров гидродом кратов, создающих момент управления, составляющие которого в вертикальной и горизонтальной плоскостях пропорциональны соответствующим отклонениям продольной оси щита, перемещении щита с помощью гидродомкратов перемещения и уменьшения тем самьт отклонения продольной оси щита от проекта { ,
Недостатком этого способа является низкое качество управления,т,е, совокупность номеров гидродомкратов, включаемых при управлении щитом, рпределяется маркшейдером на основании накопленного опыта без применения какого-либо алгоритма, что предполагает наличие субъективной ошибки ведения щита. Кроме того, при определеНИИ совокупности номеров гидродомкратов перемещения не учитывается величина угла поворота щита его продольной оси. При равенстве нулю отклонений продольной оси щита для его перемещения включаются все гидродомкраты, что ведет к снижению скорости продвижения щита и перегрузке его маслостандий.
Наиболее близким к предлагаемому по технической сущности и.достигаемому результату является способ управления движением горно-проходческого щита, заключающийся в измерении отклонений ножевой и хвостовой точек оси щита от проектного направления в горизонтальной и вертикальной плоскостях, определении управляющих сигналов в плане и профиля как Суммы величин, пропорциональных измеренным отклонениям в формировании совокупности гидродомкратов для перемеще-. ния горно-проходческого щита 2.
Однако указанный способ не обеспечивает требуемой точности управления.так как управляющие сигналы в плане и профиле вырабатываются на основании отклонений . только одной
точки (ножевой или хвостовой) относительно проектного направления, что приводит к искажению формы выработки. Гидродомкраты результирующей совокупности номеров гидродомкратов создают момент, составляющие которог в вертикальной и горизонтальной плоскостях не равны моментам, создаваемы гидродомкратами первой и второй совокупности соответственно, так как гидродомкраты первой совокупности помимо того, что реализуют требуемый мо мент в плане, создают еще и момент в профиле, аналогично, гидродомкраты второй совокупности создают не; только требуемый момент в профиле, но и момент в плане. Следовательно, составляющие момента, создаваемого гидродомкр.атами результирующей совокупности, не пропорциональны соот- ветствующим управляющим сигналам в плане и профиле. Первая и вторая совокупности формиру отся с помощью многоуровневой логической схемь, в которой определенному уровню уйрав ляющего сигнала соответствует определенная совокупность номеров гидрод омкратов. Причем номера гидродомкрата, образующие первую и вторую совокупности, определяют априорно, что не исключает возможности субъективной ошибки. При Нормировании результирующей совокупности номеров гидродомкратов не учитывается угол поворота щита относительно его продольной оси.
Кроме того, при отсутствии отклонения продольной оси щита от проектного направления в результирующую совокупность входят все гидродомкраты перемещения щита, что приводит к снижению скорости передвижения щита и недправданной загрузке его маслостанций.
Цель изобретения - повышение точности управления.
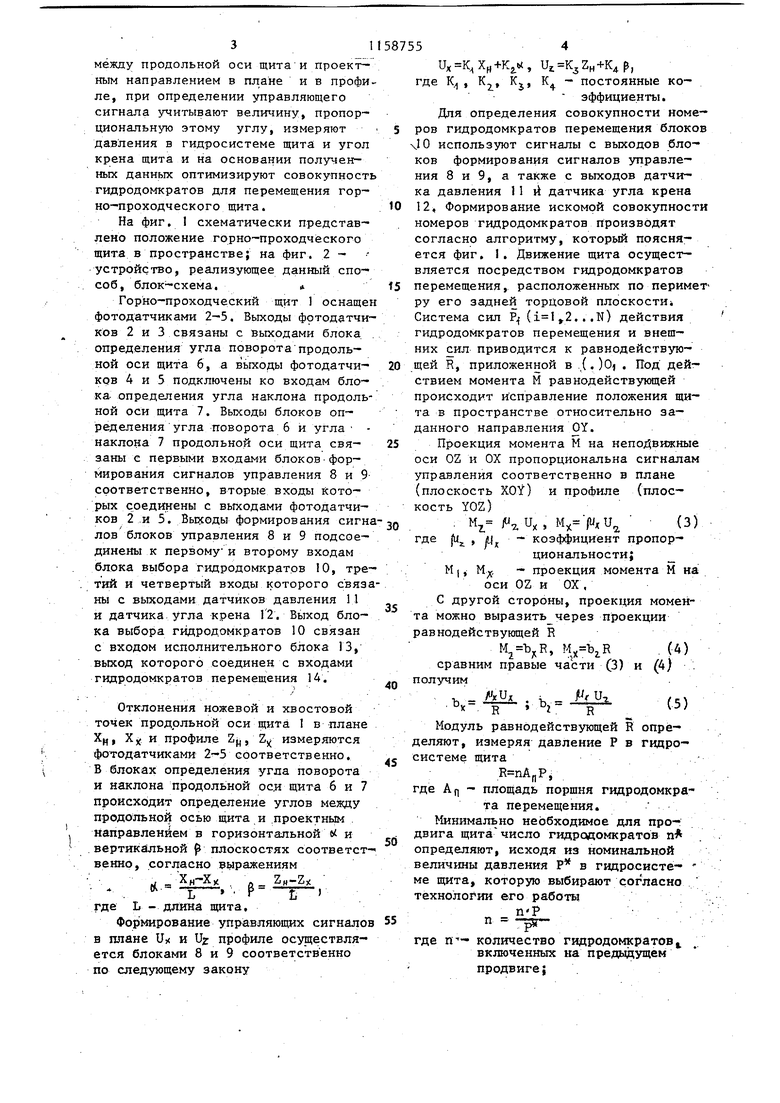
Поставленная цель достигается тем что согласно способу управления движением горно-проходческого щита, заключающемуся в измерении отклонений ножевой и хвостовой точек оси щита От проектного направлеИия в горизонтальной и вертикальной плоскосTilx, определении управляющих .сигнало в плане и профиле .как- суммь величин, пропорциональных измеренным отклонениям в формировании совокупности гвдродомкратов для перемещения горнопроходческого щита, определяют угол 3 между продольной оси щитаи проектным направлением в плане и в профи ле, при определении управляющего сигнала учитывают величину, пропорциональную этому углу, измеряют давления в гидросистеме щита и угол кроена щита и на основании полученных данных оптимизируют совокупност гидродомкратов для перемещения горно-проходческого щита . На фиг, I схематически представлено положение горно-проходческого щита в пространстве; на фиг. 2 устройство, реализующее данный способ, блок-схема, Горно-проходческий щит 1 оснаще фотодатчиками 2-5. Вьпсоды фотодатчи ков 2 и 3 связаны с выходами блока, определения угла поворотапродольной оси щита 6, а выходы фотодатчиков 4 и 5 подключены ко входам блока определения угла наклона продоль ной оси щита 7. Выходы блоков определения угла поворота 6 и угла наклона 7 продольной оси щита С1вязаны с первыми входами блоков-формирования сигналов управления 8 и 9 соответственно, вторые входы которых соединены с выходами фотодатчиков 2 и 5. Выходы формирования сигн лов блоков управления 8 и 9 подсоединены к первому и второму входам блока выбора гидродомкратрв 10, тре тий и четвертый входы которого связ ны с выходами датчиков давления 11 и датчика,угла крена Г2. Выход блока выбора гйдродомкратов 10 связан с входом исполнительного блока 13, выход которого соединен с входами гидродомкратов перемещения 14. . .. Отклонения ножевой и хвостовой точек продольной оси щита I в плане Xj, Х и профиле Zjj 5, Z измеряются фотодатчиками 2-5 соответственно. В блоках определения угла поворота и наклона продольной ос.и щита б и 7 происходит определение углов между продольной осью щита и .проектньм . направлением в горизонтальной 6 и .вертикальной плоскостях соответст венно, согласно выражениям 1ч - д Ztt-Z)( . , . .. , . - , где I. - длина щита. Формирование управляющих сигнало в плане U, и Uz профиле осутцествляется блоками 8 и 9 соответственно по следующему закону 54 ,, Us K ZH+K4p, где К , Kj, К - постоянные коэффициенты. Для определения совокупности номеров гидродомкратов перемещения блоков Ю используют сигналы с выходов блоков формирования сигналов управления 8 и 9, а также с выходов датчика давления 11 и датчика угла крена 12, Формирование искомой совокупности номеров гидродомкратов производят согласно алгоритму, который поясняется фиг. I. Движение щита осуществляется посредством гидродомкратов перемещения, расположенных по периметру его задней торцовой плоскости Система сил Р (...N) действия гидродомкратов перемещения и внешних сил приводится к равнодействующей R, приложенной в ,{. )0| . Под действием момента М равнодействующей происходит исправление положения щита в пространстве относительно заданного направления OY. Проекция момента М на неподвижные оси OZ и ОХ пропорциональна сигналам управления соответственно в плане (плоскость XOY) и профиле (плоскость YOZ) : М , , М.и (3) где (Uj, , jUjj - коэффициент пропорциональностиМ|, М, - проекция момента М на оси OZ и ОХ , С другой стороны, проекция момента можно выразить через проекции равнодействующей R М,Ъ,Е, М,Ъ,Н . (4) сравним правые части (3) и (4) . получим Модуль равнодействующей R определяют, измеряя давление Р в гвдросистеме щита К пАпР/ где Ар - площадь порщня гидродомкрата перемещения. Минимально необходимое для продвига щита число гидродомкратов п определяют, исходя из номинальной величины давления Р в гидросистеме щита, которую выбирают согласно технологии его работы n -р где П- количество гидродомкратов включенных на предыдущем продвиге; Р - давление в гидросистеме на предьцгущем продвиге. Так как п может быть только , то округление результата произ водится в большую сторону. Величины проекций bf и Ъ радиуса-вектора Ъ() 0 приложения равнодействующей .зависят ot расположення домкратов, включенных при перемещении „ sin JJ-, J;, (n l,2..,.N), где г - радиус-вектор точки приложения усилия 1-того гидродомкрата;i - номер падродомкрата перемещения; количество гидродомкратов, входящих в совокупность; Jl - угоп между радиусом-вектором Vi и осью OZ; N - общее количество тидродом- кратов, установленных на щите. Если в процессе движения щит повернулся вокруг своей продольной ос -на угол Q, то для определения необходимой совокупности номеров домкра тов используются значения Ъ , Ъ рассчитанные по соотношениям: ,(cos0 4-1 sinji sin8 S cosjl ) M. /и |fg H b, r(cos05. cosjl - sineS sinjl ) IM il Так как величина r« j однозначно определены для каждого из типов щитов, то можем вьгаислить для различных совокупностей номеров гидродЬмкратов. Проекции b,j и b (5) сравнивают сь и Ь, расчитанными по Сб для различных совокзгпностей гидродомкратов согласно соотношению |bx-b |+|b -b | min Получают совокупность номеров гидродомкратов перемещения, которые создают момент, пропорциональньй величине сигнала управления в плане ив профиле соответственно. Таким образом, по известной величине си гналрв управления U,( U onределяют совокупность номеров гидродомкратов, которые необходимо включить при перемещении щита для уменьшения отклонения его продольной оси ОО от заданного направления. Цифровой код, соответствующий найденной совокупности номеров гидродомкратов , поступает на вход исполнительного устройства 13, сигнал с выхода которого включают гидродомкраты перемещения щита 14, В результате непрерывного автоматического управления движением щита по описанному алгоритму значительно уменьшается среднеквадратичная погрешность ведения щита вдоль проект ного направления. Следствием зтого является повышение точности управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| Система управления движением проходческого щита | 1982 |
|
SU1073455A1 |
| Устройство управления движением проходческого щита | 1980 |
|
SU949188A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПЕРЕДВИЖЕНИЯ ЩИТА И ВОЗВЕДЕНИЯ КРЕПИ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2206751C1 |
| Устройство для определения отклонения проходческого щита относительно проектной оси тоннеля | 1983 |
|
SU1125375A1 |
| Щит для проходки тоннеля открытым способом | 1982 |
|
SU1070313A1 |
| СПОСОБ ПРОХОДКИ И ПОГАШЕНИЯ ГОРНЫХ ВЫРАБОТОК И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2226608C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПРОХОДЧЕСКОГО ЩИТА | 2001 |
|
RU2208166C1 |
| Проходческий щит | 1981 |
|
SU1008457A1 |

СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГОРНОЧТРОХОДЧЕСКОГО ЩИТА, заключаю- щийся в измерении отклонений ножевой и хвостовой точек оси щита от проектного направления в горизонтальной и вертикальной плоскостях, определении управляющих сигналов в плане и про- . филе как суммы величин, пропорциональных измеренным отклонениям в формировании совокупности гвдродомкра- тов перемещения горно-проходческого щита, отл1|чающийся тем, что, с целью повьппения точности управления, определяют угол между продольной осью щита и проектньм направлением в плане и в профиле, при определении управляющего сигнала, учитывают величину, пропорциональную этому углу, измеряют давления в гидросистеме щита и угол крена щита и на (Л . основании полученных данных оптимизируют совокупность гидродомкратов для перемещения горно-проходческого щита.
