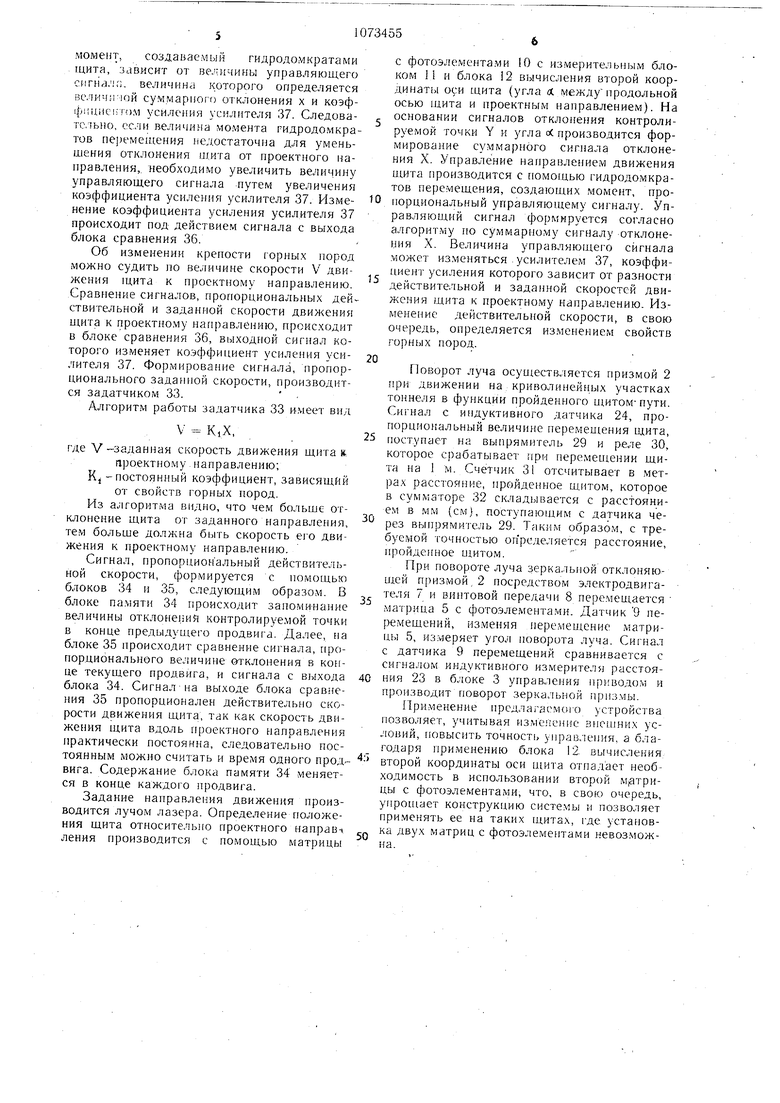
Изобретение относится к горной автоматике, в частности к устройствам для направленного движения горнопроходческих машин. Известна система управления движением горной машины, содержащая оптический задатчик направления, фотоприемный блок, измерительный блок, дальномер, привод поворота, зеркальную отклоняюш,ую призму, расположенную между оптическим задатчиком направления и проходческим щитом . Однако такая система не обеспечивает требуемой точности управления из-за отсутствия контроля действительного поворота зеркальной отклоняющей призмы и нечувствительности к изменениям внешних условий. Кроме того, наличие в фотоприемном блоке двух матриц с фотоэлементами не позволяет использовать систему на щитах малого диаметра. Известна также система управления движением проходческого щита, содержащая оптический задатчик направления, зеркальную отклоняющую призму с приводом и блоком управления приводом, две матрицы с фотоэлементами, связанные с измерительным блоком, блок измерения пройденного расстояния, управляющий блок, фотоэлектрическую следящую систему щелевой диафрагмы с датчиком перемещений, установленную между зеркальной отклоняющей призмой и матрицей с фотоэлементами 2. Указанная система не обеспечивает требуемой точности управления, так как не учитывает изменение внешних условий. Кроме того, система не может быть ис юльзована на щитах малого диаметра, так как содержит две матрицы с фотоэлементами. Целью изобретения является повышение точности управления и упрощение конструкции системы. Поставленная цель достигается тем, что система управления движением проходческого щита, содержащая оптический задатчик направления, зеркальную отклоняющую призму с приводом и блоком управления приводом, соответствующие входы которого соединены с выходами блока измерения Г1ройденного расстояния и фотоэлектрической следящей системы щелевой диафрагмы, матрицу и с фотоэлементами, подключенную к входу измерительного блока, выход которого подключен к первому входу управляющего блока, дополнительно снабжена усилителем с регулируемым коэффици.; ентом усиления, задатчиком, блоком памяти, двумя блоками сравнения и блоком вычисления второй координаты оси щита, выполненным в виде двух интеграторов и двух сумматоров, при этом, первый вход ., первого сумматора соединен с выходом усилителя с регулируемым коэффициентом усиления, а выход подключен к первому входу первого сумматора, второй вход которого соединен с выходом измерительного блока и первым входом второго сумматора, выход которого подключен к второму входу первого интегратора, первому вхрду второго интегратора и второму входу управляющего блока, а второй вход подключен к выходу второго интегратора, второй вход которого соединен с выходом первого сумматора и третьим входом первого интегратора, выход управляющегоблока соединен с первым входом усилителя с регулируемым коэффициентом усиления, второй вход которого соединен с выходом первого блока сравнения, соответствующие входы которого подключены к выходам задатчика и второго блока сравнения, первый вход которого соединен с выходом блока памяти, вход которого, а также вход задатчика и второй вход второго блока сравнения подключен к выходу измерительного блока. На чертеже представлена блок-схема системы управления движением проходческого щита. Система состоит из оптического задатчика направления 1 (лазера), зеркальной отклоняющей призмы 2, которая может поворачиваться вокруг своей вертикальной оси приводом с блоком 3 управления приводом. Угол поворота луча измеряется фотоэлектрической следящей системой щелевой диафрагмы 4, снабженной матрицей 5 с фотоэлементами, установленной между зеркальной призмой отклоняющей 2 и проходческим щито.м и связанной с блоком 6 усилителей, с электродвигателем 7, с винтовой передачей 8 и датчиком 9 перемещений, который соединен с блоком 3 управления приводом и установлен как и все перечисленные элементы на обделке тоннеля. Для измерения величины отклонения контролируемой точки от заданного направления 6 служит матрица с фотоэлементами 10, соединенная с измерительным блоком 11. Вторая координата оси щита (например, курсовой угол) определяется блоком 12 вычисления второй координаты оси щита, который состоит из первого интегратора 13, выход которого подключен к входу первого сумматора 14, второй вход которого соединен с выходом измерительного блока 11, а выход связан с входами первого интегратора 13 и второго интегратора 15. Выход второго интегратора 15 соединен-с входом второго сумматора 16, выход которого связан с входами интеграторов 13 и сумматора 17 управляющего блока 18, содержащего дифференцирующий элемент 19, формирователь модуля 20, сумматор 21, входы которого соединены с выходо.м сумматора 17. Второй вход . сумматора 21 подключен к выходу блока 22 умножения, входы которого свя-. заны с выходами формирователя модуля 20 и дифференцирующего элемента 19. Угол поворота зеркальной призмы 2 зависит от величины сигнала на выходе блока 23, измерения пройденного расстояния, содержащего индуктивный датчик 24, подвижная катушка которого связана со штоком механизма 25 перемещения с приводом 26 посредством электромагнитного механизма 27 расцепления, вход которого связан с выходом датчика 28 начала движения и соединяющего жестко подвижную катушку-индуктивного датчика 24 и механизмом 25 перемешения только на время движения щита, что исключает накапливание ошибки за счет холостого хода и деформации обделки тоннеля. Кроме того, блок 23 включает выпрямитель 29 и реле 30, соединенное через счетчик 31 с сумматором 32 пройденного расстояния. Для того, чтобы учесть изменяющиеся -в процессе движения щита внешние воздействия, выход измерительного блока I1 соединен с входами задатчика 33, блока памяти 34 и второго элемента сравнения 35, второй вход которого соединен с выходом блока памяти 34, а выход связан с входом первого блока сравнения 36, второй вход которого подключен к, выходу задатчика 33. Выход блока сравнения 36 связан с входом усилителя 37 с регулируемым коэффициентом усиления, второй вход которого соединен с выходом сумматора 21, а выход - с входом блока 38 реле. Предлагаемая система работает следующим образом. С помощью луча лазера 1 задается нужное направление движения. Луч, проходя через зеркальную отклоняющую призму 2 и отверстие в матрице 5 щелевой диафрагмы 4, поступает на. матрицу с фотоэлементами 10, которая совместно с измерительным блоком 11 осуществляет измерение отклонения контролируемой точки. Блоком 12 вычисления второй координаты оси щита производится определение курсового угла на основании сигналов, поступающих с измерительного блока 11 и усилителя 37. Алгоритм работы блока 12 вычисления второй координаты оси щита имеет следующий вид: ot КоУ -К,о() ; , где (Х -курсовой угол продольной щита-с бсью выработки; Y -отклонение контролируемой точки; си -угловая скорость поворота щита; управляющий сигнал; -1 -постоянные коэффициенты, определяемые параметрами объекта управления. Согласно алгоритму работы блока 12
вычисления второй координаты оси щита на входе интегратора 13 происходит суммиро&ание сигналов, пропорциональных управгидродомкратами щита, недостаточна для преодоления сил сопротивления, зависящих от свойств горных пород. В свою очередь ляющему сигналу U, угловой скорости (ц) и углу о; ,.На выходе интегратора 13 появляется сигнал, пропорциональный угловой скорости поворота GO.. Однако в процессе работы щита, его параметры могут меняться. Поэтому координаты ои и . будут вычисляться с ошибкой. Для того, чтобы исключить влияние изменения параметров щита на точность вычисления ы и о(, на вход сумматоров 14 и 16 подается сигнал, пропорциональный Y, величина которого также зависит от параметров щита. Таким образом, происходит корректировка сигналов W и л В соответствии с изменяющи.мися параметрами щита., . На входе интегратора 15 происходит су.ммирование сигналов, пропорциональных (и и л . После интегрирования сигнал, пропорциональный csJ суммируется с сигналом, пропорциональным Y на сумматоре 16. Этим осуществляется корректировка сигнала, пропорционального л согласно описанному выше. Так, на основании управляющего сигнала и и сигнала, пропорционального Y, происходит вычисление второй координаты оси щита, т.е. угла л . Все описанное выше относится к вычислению координат щита в плане. Аналогично происходит вычисление блоком 12 второй координаты оси щита в профиле, т.е. угла между продольной осью щита и проектным направлением. Вторая координата оси щита используется для формирования управляющего сигнала. Сигнал управления формируется управляющим блоком 18 на основании сигналов с измерительного блока 11 и блока 12 вычисления второй координаты оси щита. В управляющем блоке 18 происходит дифференцирование суммарного сигнала дифференцирующим элементом 19, определение его модуля формирователем 20, перемножение модуля и производной блоком 22 умножения и сложение с суммарным сигналом на сумматоре 21. После этого сигнал усиленный усилителем 37 поступает на блок 38 реле, который производит включение гидродомкратов перемещения. Алгоритм управления имеет вид u-x4xlf; где X - суммарный сигнал отклонения на выходе сумматора 17. В процессе движения щита может произойти увеличение крепости горных пород. Вследствие этого отклонение щита от заданного направления будет уменьшаться незначительно, или не уменьщится совсем. тзк как величина момента, создаваемого
момент, создаваемый гидродомкратами щита, зависит от ве,;нчины управляющего сигнгЗ..}, величине которого определяется величггюй суммариогг) отклонения х и коэффицисмггом усиления усилителя 37. Следовательно, если величина мо.мента гидродомкратов не)еме1иения недостаточна для уменьшения отклонения шита от нроектного направления,, необходимо увеличить величину управляющего сигнала путем увеличения коэффициента усиления усилителя 37. Изменение коэффициента усиления усилителя 37 происходит под действием сигнала с выхода блока сравнения 36.
Об изменении крепости горных пород можно судить по величине скорости V движения ндита к проектному направлению. Сравнение сигналов, пропорциональных действительной и заданной скорости движения щита к проектно.му направлению, происходит в блоке сравнения 36, выходной сигнал которого изменяет коэффициент усиления уси.яителя 37. Фор.мирование сигнала, пропорционального заданной скорости, производится задатчиком 33.
Алгорит.м работы задатчика 33 имеет вид
V - KiX,
где V-заданная скорость движения щита «; проектному.направлению;
Kj -постоянный коэффициент, зависящий от свойств горных пород.
Из алгоритма видно, что чем больще отклонение щита от заданного направления, те.м больще должна быть скорость его движения к проектному направлению.
Сигнал, пропорциональный действительной скорости, формируется с помощью блоков 34 и 35, следующим образом. В блоке памяти 34 происходит запоминание величины отклонений контролируемой точки в конце предыдущего продвига. Далее, на блоке 35 нроисходит сравнение си1-нала, пропордионального величине отклонения в KOFIце текущего продвига, и сигнала с выхода блока 34. Сигнал на выходе блока сравнения 35 пропорционален действительно скорости движения щита, так как скорость движения вдоль проектного направления практически постоянна, следовательно постоянным можно считать и время одного продвига. Содержание блока памяти 34 меняется в конце каждого продвига.
Задание направления движения производится лучом лазера. Определение положения щита относительно проектного направч ления производится с помощью матрицы
С фотоэлементами 10 с измерительным блоком 11 и блока 12 вычисления второй координаты оси щита (угла 4 между продольной осью щита и проектным направлением). На основании сигналов отклонения контролируемой точки Y и угла производится формирование суммарного сигнала отклонения X. Управление направлением движения щита производится с помощью гидродомкратов перемещения, создающих момент, пропорциональный управляющему сигналу. Управляюца,пй сигнал формируется согласно алгорит.му по суммарному сигналу отклонения X. Величина управляющего сигнала может изменяться .усилителем 37, коэффициент усиления которого зависит от разности действительной и заданной скоростей движения щита к проектному направлению. Изменение действительной скорости, в свою очередь, определяется изменением свойств горных пород.
Поворот луча осуществляется призмой 2 при движении на криволинейцых участках тоннеля в функции пройденного щитом-пути. Сигнал с индуктивного датчика 24, пропорциональный величине перемещения щита, поступает на выпрямитель 29 и реле 30, которое срабатывает при перемещении щита на 1 м. Счетчик 31 отсчитывает в метрах расстояние, прейденное щитом, которое в сумматоре 32 складывается с расстоянием в мм (см), поступающим с датчика через выпрямитель 29. Таким образом, с требуемой точностью определяется расстояние, пройденное щитом.
При повороте луча зеркальной отклоняюцдей призмой,2 посредством электродвигателя 7 и винтовой передачи 8 перемещается матрица 5 с фотоэлементами. Датчик 9 пе)емещений, изменяя перемещение матрицы 5, измеряет угол поворота луча. Сигнал с датчика 9 перемещений сравнивается с сигналом индуктивного измерителя расстояния 23 в блоке 3 управления приводом и производит поворот зеркальной призмы.
При.менение предла1-аомо о устройства позволяет, учитывая измеиение впегиних условий, повысить точность управлепия, а благодаря применению блока 12 вычисления второй координаты оси щита отпадает необходимость в использовании второй м трицы с фотоэлементами, что, в свою очередь, упрощает конструкцию системы и позволяет применять ее на таких щитах, 1де установка двух матриц с фотоэлементами невозможна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| СПОСОБ УПРАВЛЕНИЯ ЩИТОМ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2509892C1 |
| Система автоматического управления движением коллекторного проходческого щита | 1988 |
|
SU1599537A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГОЩИТА | 1979 |
|
SU825939A1 |
| Система управления движением горной машины | 1974 |
|
SU682647A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПЕРЕДВИЖЕНИЯ ЩИТА И ВОЗВЕДЕНИЯ КРЕПИ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2206751C1 |
| УСТРОЙСТВО СИНХРОННОГО ПЕРЕМЕЩЕНИЯ ГИДРОЦИЛИНДРОВ РАБОЧЕГО ОРГАНА | 1997 |
|
RU2119597C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ МИНИ-ЩИТА ДЛЯ СТРОИТЕЛЬСТВА МИНИ-ТОННЕЛЕЙ | 2009 |
|
RU2405937C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ОБЪЕКТА, СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ), СПОСОБ ОПРЕДЕЛЕНИЯ ФАЗОВОЙ СВЯЗИ КАНАЛОВ И КОЭФФИЦИЕНТА ПЕРЕДАЧИ ОБЪЕКТА В СИСТЕМЕ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2001 |
|
RU2206916C2 |
СИСТЕМА УПГ АВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГО ЩИТА, содержащая оптический задатчик направления, зеркальную отклоняюн1ую призму с приводом и блоком управления, приводо.м, соответствующие входы которого соединены с выходами блока измерения пройденного расстояния и фотоэлектрическ.ой следящей системы щелевой диафрагмы, матрицу с фотоэлементами, подключенную к входу измерительного блока, выход которого подключен к перво.му входу управляющего блока, отличающаяся тем, что, с упрощения конструкции и повыщения точности управления, система снабжена усилителем с регулируемым коэффициентом усиления, задатчиком, блоком памяти, двумя блоками сравнения и блоком вычисления второй координаты оси щита, выполненным в виде двух инте(раторов и двух сумматоров, при . это.м первый вход первого интегратора соединен с выходом усилителя с регулируемым коэффициентом усиления, а выход.подключен к первому входу первого сумматора, второй вход которого соединен с выходом измерительного блока и первым входом второго сумма тора, выход кото.рого подключен к второму входу первого интегратора, первому входу второго интегратора и второму входу управляющего блока, а второй вход подключен к выходу второго интегратора, второй вход которого соединен с выходом первого сумматора и третьим входом первоS го интегратора, выход управляющего блока соединен с первым входом усилителя с ре(Л гулируемым коэффициентом усиления, второй вход которого соединен с выходом первого блока сравнения, соответствующие входы которого подключены к выходам .ика и второго блока сравнения, первый вход которого соединен с выходом блока памяти, вход которого, а также вход задатчика и второй вход второго блока сравнения подключены к выходу измерительного блока. со 4 ел ел
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система управления движением горной машины | 1974 |
|
SU682647A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетелр,ство СССР № 825939, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
