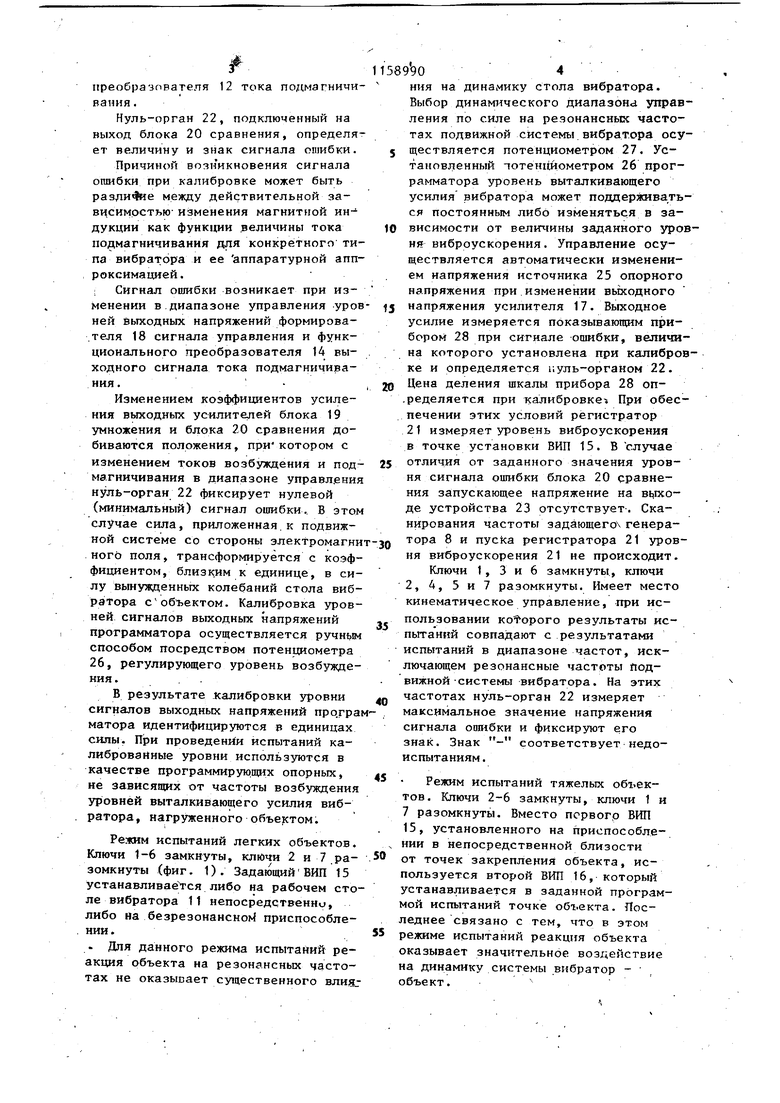
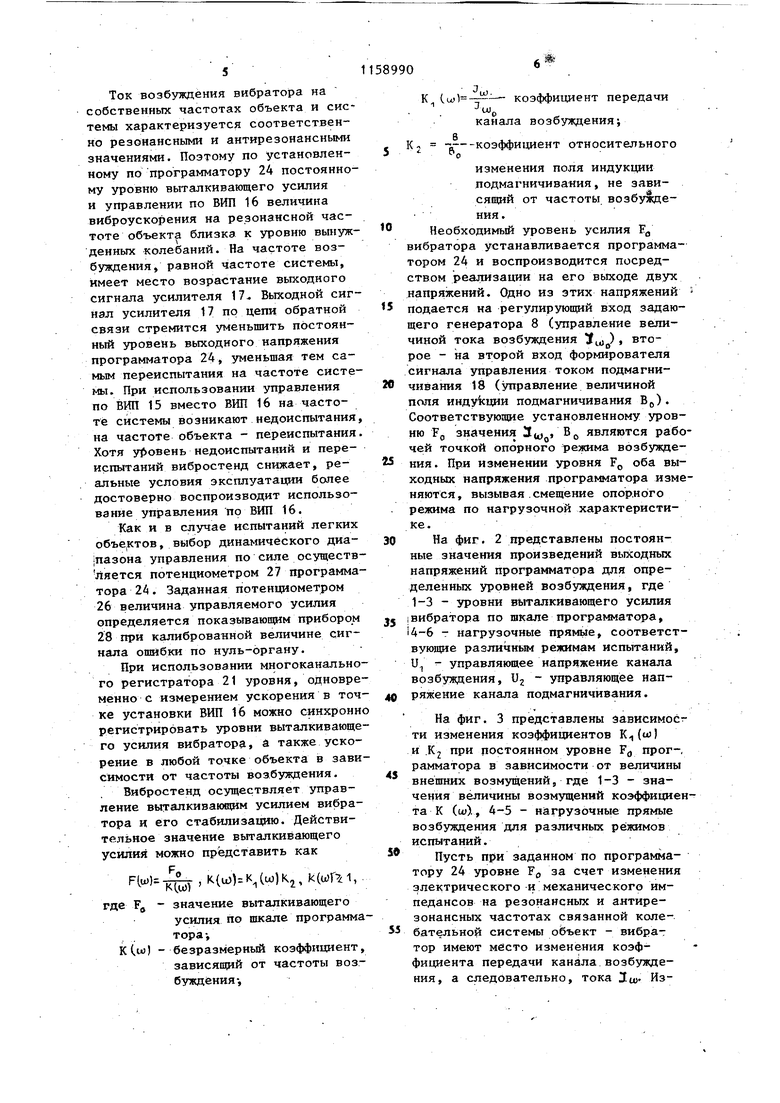
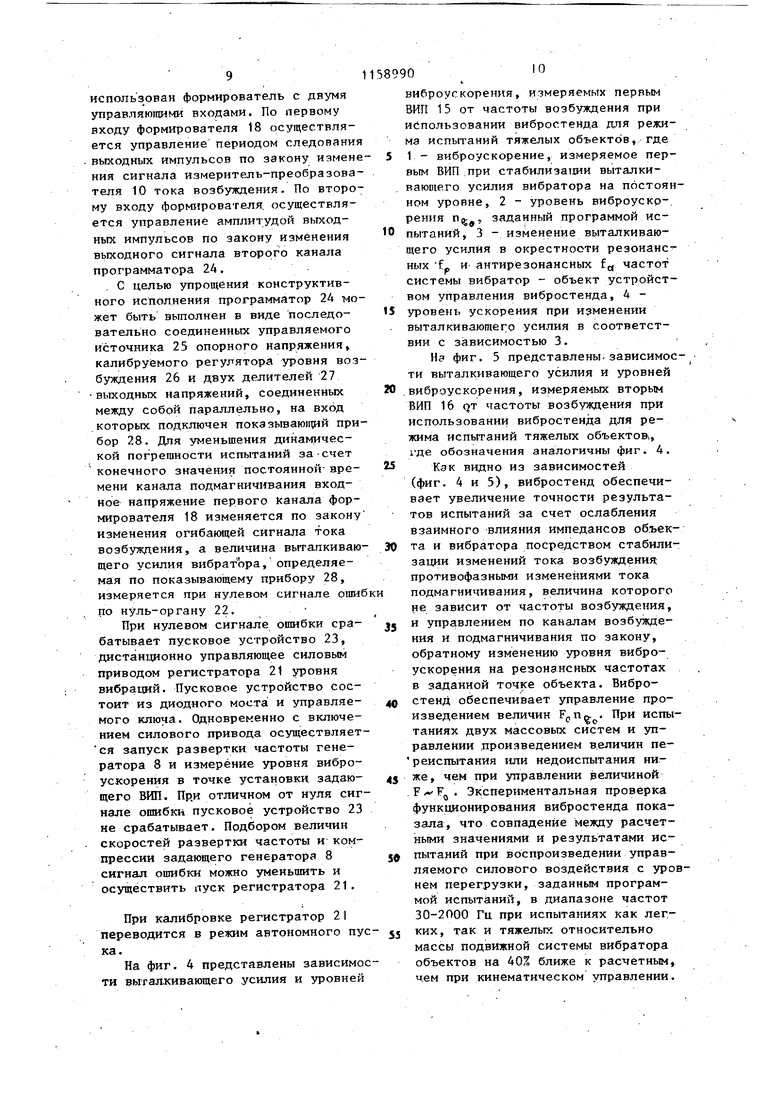
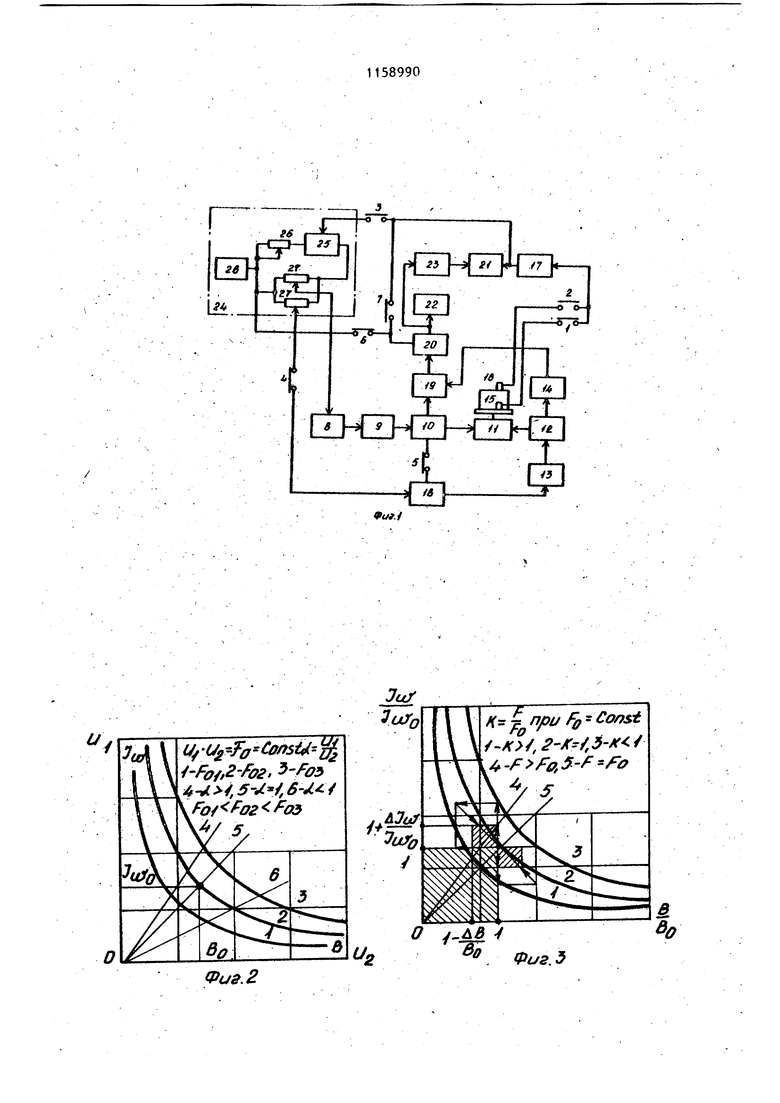
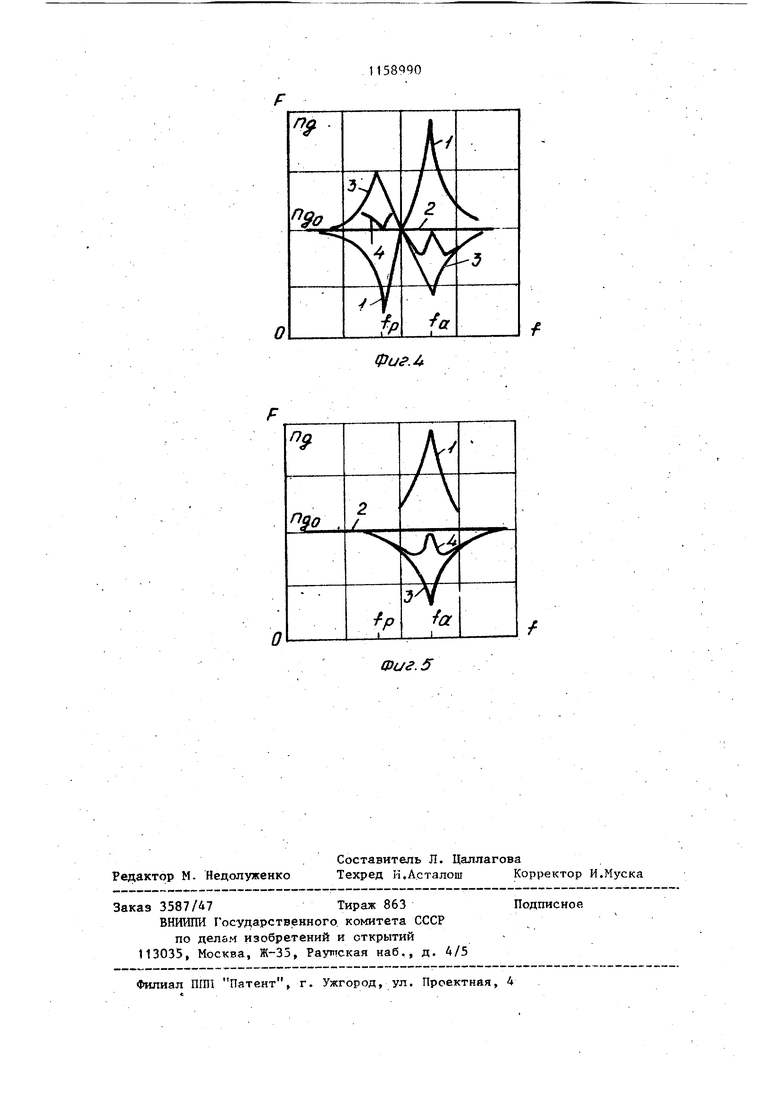
. Изобретение относится к вибраци онной технике и может быть использ вано при лабораторных испытаниях на вибропрочность и. виброустойчивость объектов различного назначения , Цель изобретения - повьтшение точности и расширение области применения вибростенда. На фиг. 1 показана функциональная схема предлагаемого вибростенда; на фиг. 2 и 3 - соответственно механизм управления заданным уровнем выталкивающего усилия и стабилизацию его величины; на фиг. 4 и 5 - зависимости выталкивающего усилия и уровней виброускорений, измеряемый соответственно первым и вторым ВИП при испытаниях тяжелы объектов. Вибростенд содержит ключи 1-7, задающий генератор 8,частоты, усилитель 9 мощности, измеритель-преобразователь 10 тока возбуждения, вибратор 11, измеритель-преобразователь 12 тока подмагничивания, управляемый источник 13 питания подмагничивания, функциональный преобразователь 14, первый виброизмерительный преобразователь 15, второй виброизмерительный преобра ватель 16, усилитель 17, формиров тель 18 сигнала управления током подмагничивания,. блок 19 умножения, блок 20 сравАения, регистратор 21 уровня вибраций, нуль-орга 22, пусковое устройство 23, прогр матор 24, управ:1яемый источник; 25опорного напряжения, регулятор 26уровня возбуждения, делитель 27выходных напряжений, показьгааю щий прибор 28. Вибростенд работает следующим образом. Режим калибровки. Ключи 1, 4, 5 и 7 замкнуты, ключи 2, 3 и 6 разомкнуты. Калибровка осуществляетс на любой из частот линейного участ ка амплитудно-частотной характерис тики системы вибратор - испытывае мый объект, например частоте 400 Гц, удаленной от его резонансных частот. При калибровке исполь ется первый ВИЛ, установленный на безрезонансном приспособлении или непосредственно на рабочем ст ле ибратора. 02 С первого выхода программатора 24 регулируемый уровень напряжения сигнала поступает на управляющий вход задающего генератора 8. Выходное напряжение сигнала переменной частоты генератора 8 поступает на вход усилителя мощности 9, выход которого подключен через измерительпреобразователь 10 тока Бозб гадения на вход подвижной катушки вибратора 11. При наличии поля индукции, создаваемого током управляемого источника 13 питания подмагничивания, протекающим через измеритель-преобразователь 12 тока и катушку, подмагничивания вибратора 11, происходит возбуждение колебаний рабочего стола с объектом. Уровень этих колебаний контролируется по величине ускорения, измеряемого первым ВИП 15, выход которого подсоединен через ключ 1 на вход усилителя 17. Выходной сигнал усилителя 17 измеряется регистратором 21 уровня вибраций. В режиме калибровки сигнал ускорения, измеряемый регистратором 21, пропорционален величине выходного усилия вибратора. Коэффициент пропортдиональности равен приведенной массе системы вибратор - объект. Ускорение, а следовательно, и выталкивающее усилие зависят только от величины напряжения выходного сигнала программатора 24. С второго выхода программатора напряжение поступает на второй вход формирователя 18 сигнала управления током подмагничивания , на первый вход которого через ключ 5 подсоединен измеритель-преобразователь 10. Выходной сигнал формирователя 18 поступает на управляющий вход источника 13 питания подмагничивания. При возбуждении колебаний рабочего стола вибратора 11 на Bbixo je блока 20 Сравнения появляется сигнал ошибки. Сигнал ошибки пр дставляет собой разность между сигналами выходных напряжений усилителя 17 и блока 19 умножения. Выходной сигнал блока умножения пропорционален произведению сигналов: тска. возбуждения с измерителя-преобразователя 10 и индукции магнитного поля с выхода функционального преобразователя 14 сигнала измерителяпреобразователя 12 тока подмагничи вачня. Нуль-орган 22, подключенный на выход блока 20 сравнения, определя ет величину и знак сигнала ошибки. Причиной возникновения сигнала ошибки при калибровке может быть разлиф е между действительной зависимостью изменения магнитной индукции как функции величины тока подмагничивания для конкретного ти па вибратора и ее аппаратурной аппроксимацией. : Сигнал ошибки возникает при изменении в.диапазоне управления уро ней выходных напряжений формирова.теля 18 сигнала управления и функционального преобразователя 14 выходного сигнала тока подмагничивания. Изменением коэффициентов усиления выходных усилителей блока 19 умножения и блока 2.0 сравнения добиваются положения, при котором с изменением токов возбуждения и под мэгничивания в диапазоне управления нуль-орган 22 фиксирует нулевой (минимальный) сигнал ошибки.. В этом случае сила, приложенная.к подвижной системе со стороны элекТромагни .ного поля, трансформируется с коэффициентом, близким к единице, в силу вынужденных колебаний стола вибратора собъектом. Калибровка уровней сигналов выходных напряжений программатора осуществляется ручньм способом посредством потенциометра 26, регулирующего уровень возбуждения . . . В результате калибровки уровни сигналов выходных напряжений про.гра матора идентифицируются р единицах силы. При проведении испытаний калиброванные уровни используются в качестве программирующих опорных, не зависящих от частоты возбуждения уровней выталкивающего усилия вибратора, нагруженного объектом. Режим испытаний легких объектов. Ключи 1-6 замкнуты, ключи 2 и 7 разомкнуты (фиг. 1). ЗадающийВИП 15 устанавливаемся либо на рабочем сто ле вибратора 11 непосредственно, либо на безрезонаисно приспособлении. . Для данного режима испытаний реакция объекта на резонансных частотах не оказывает существенного влид ния на динамику стола вибратора. Выбор динамического диапазона управления по силе на резонансных частотах подвижной системы.вибратора осуществляется потенциометром 27. Установленный потенциометром 26 программатора уровень выталкивающего усилия вибратора может поддерживаться постоянным либо изменяться в зависимости от величины заданного уровня ниброускорения. Управление осуществляется автоматически изменением напряжения источника 25 опорного напряжения при изменении вькодного напряжения усилителя 17. Выходное усилие измеряется показывающим прибором 28 при сигнале -ошибки, величина которого установлена при калибровке и определяется нуль-органом 22. Цена деления шкалы прибора 28 оп.ределяется при калибровке-s При обеспечении этих условий регистратор 21 измеряет уровень виброускорения в точке установки ВИП 15. В случае отличия от заданного значения уровня сигнала ошибки блока 20 сравнения запускающее напряжение на BI IXOде устройства 23 отсутствует-. Сканирования частоты задающегоч генератора 8 и пуска регистратора 21 уровня виброускорения 21 не происходит. Ключи 1, 3 и 6 замкнуты, ключи 2, 4, 5 и 7 разомкнуты. Имеет место кинематическое управление, при использовании ко орого результаты испытаний совпадают с результатами испытаний в диапазоне частот, исключающем резонансные частоты йодвизкной-системы вибратора. На этих частотах нуль-орган 22 измеряет максимальное значение напряжения сигнала опп1бки и фиксируют его знак. Знак - соответствует недоиспытаниям. Режим испытаний тяжелых объектов. Ключи 2-6 замкнуты, ключи 1 и 7 разомкнуты. Вместо псрвогр ВИП 15, установленного на приспособлении в непосредственной близости от точек закрепления объекта, используется второй ВИП 16, который устанавливается в заданной програмой испытаний точке объекта. Поседнее связано с тем, что в этом ежиме испытаний реакция объекта казывает значительное воздействие а динамику системы вибратор - бъект. Ток возбуждения вибратора на собственных частотах объекта и сис темы характеризуется соответственно резонансными и антирезонансными значениями. Поэтому по установленному по программатору 24 постоянному уровню выталкивающего усилия и управлении по ВИП 16 величина виброускорения на резонансной частоте объекта близка к уровню вынуж денных колебаний. На частоте возбуждения, равной частоте системы, имеет место возрастание выходного сигнала усилителя 17 Выходной сиг нал усилителя 17 по цепи обратной связи стремится уменьшить постоянный уровень выходного напряжения программатора 24, уменьшая тем самым переиспытания на частоте систе мы. При использовании управления по ВИЛ 15 вместо ВИП 16 на частоте системы возникают недоиспытания на частоте объекта - переиспытания Хотя уровень недоиспытаний и переиспытаний вибростенд снижает, реальные условия эксплуатации более достоверно воспроизводит использование управления по ВИП 16. Как и в случае испытаний легких , выбор динамического диа|пазона управления по силе осуществ ляется потенциометром 27 программа тора 24. Заданная потенциометром 26 величина управляемого усилия определяется показывающим прибором 28 при калиброванной величине сигнала ошибки по нуль-органу. При использовании многоканально го регистратора 21 уровня, одновре менно с измерением ускорения в точ ке установки ВИП 16 можно синхронн регистрировать уровни выталкивающе го усилия вибратора, и также ускорение в любой точке объекта в зави симости от частоты возбуждения. Вибростенд осуществляет управление выталкивающим усилием вибратора и его стабилизацию. Действител1зное значение выталкивающего усилия можно представить как Fiu)) - , K{u)) К (ш) Kj, k{u)r/ 1, где Рд - значение выталкивающего усилия по шкале программа тора-, Ktw) - безразмерный коэффициент зависящий от частоты возбуждения-. К (и) коэффициент передачи канала возбуждения; в Кл -акоэффи1даент относительного РО изменения поля индукции подмагничивания, не зависящий от частоты возбуждения . Необходимый уровень усилия Е вибратора устанавливается программатором 24 и воспроизводится посредством реализации на его выходе двух напряжений. Одно из этих напряжений подается на регулирующий вход задающего генератора 8 (управление величиной тока возбуткдения tf ц) ) второе - на второй вход формирователя сигнала управления током подмагничивания 18 (управление величиной поля индукции подмагничивания В). Соответствующие установленному уровню Fg значения 3,, , В, являются рабочей точкой опорного режима возбуждения. При изменении уровня F,, оба выходных напряжения программатора изменяются, вызывая.смещение опорного режима по нагрузочной характеристике. На фиг. 2 представлены постоянные значения произведений выходных напряжений программатора для определенных уровней возбуждения, где 1-3 - уровни выталкивающего усилия I вибратора по шкале программатора, 14-6 - нагрузочные прямые, соответствующие различным режимам испытаний, и - управляющее напряжение канала возбуждения, Uj - управляющее напряжение канала подмагничивания. На фиг. 3 представлены зависимости изменения коэффициентов K(u)) и .Kj при постоянном уровне Fj, прог-, рамматора в зависимости от величины внешних возмущений, где 1-3 - значения величины возмущений коэффициента К (ш)., 4-5 - нагрузочные прямые возбуждения для различных режимов испытаний. Пусть при заданном по программатору 24 уровне F(, за Счет изменения электрического -имеханического импедансов на резонансных и антирезонансных частотах связанной колебательной системы объект - вибра-г тор имеют место изменения коэффициента передачи канала.возбуждения, а следовательно, тока Изменения тока 43uJ приведут к рассогласованию между уровнем F про грамматора и его действительным значением. Действительное значение ГС ) стабилизируется на заданном уровн F, посредством изменения коэффициента счет изменения поля индукции дбтак, чтобы К(оо) 1. Изменения 4в осуществляются посредством изменения тока подмагничивания Дпд О цепи обратной связи с измеритель-преобразователя 10 тока возбуждения на управляемый вход источника 13 питания подмагни чивания. Стабилизация уровня F , ДР О в диайат.е. обеспечение зоне изменений ± к ± л& име ет место в каждой из точек нагрузочных фигур 2 и 3, если на .рез;онанснь1ж частотах возбуждеЛ5ш дВ ния. + t . Как показа шд BO но на фиг.- 3,требование условия стабилизации можно представить гра как отношение площадей заштрихованных квадратов (для нагрузочной прямой 4 - прямоугольника и квадрата), вершины которых сопря жены и лежат на нагрузочной прямой При обеспечении стабилизации отношение площадей стремится к нулнэ, а рабочая точка переходного режима возбуждения (F ; Рд), перемещаю щаяся по диагонали малого квадрата совпадает с гиперболической зависимостью К(и) 1. ПРИ использовании нагрузочной прямой 4 и возникновении, возмущений тока J, приводящих к значител ному отличию коэффиента К(и) от 1 одновременно с изменениями, 4l(; и Л В изменяется уровень п„, в точке установки задающего ВИЛ,- Эти изменения по цепи обратной связи с задающего ВИП на вход программатора приведут к изменению напряжений Ц и U2 , а следовательно, . уровня Fy и относительных значений 4 JU) dfl и - Ju)p BO В результате рабочая точка пере ходного режима стремится к опорному режиму Fp , где - О и F Р .01 Из изложенного следует, что ста билизированная величина выталкиваю 0 щего усилия вибратора является функцией уровня перегрузки F((ng)BrU2(n)3 . . Разложив функцию F (п) в ряд . по степеням п,, можно показать, что на резонансной частоте возбуждения вблизи значений y. 3. , В 6 вибростенд обеспечивает в первом приближении постоянство произведения величин РдП , где od - показатель степени. Значения показателя об , который может быть любым .целым или дробным числом, определяется законом изменения выходных напряжений программатора: при разомкнутой цепи обратной, связи с задающего ЗИП oi О и F FO , при линейной зависимости между U., , U , IHF Fflnn- . Так как управление относитель- НОЙ величиной имеет, место за°счет изменения относительной велиЛ г,„ чины -::.-- , обеспечение линейности калибровки выходных напряжений программатора 24 по силе осуществляется посредством изменения, уровней входного напряжения второго канала формирователя 18 сигнала управления током подмагничивания и выходного напряжения функционального преобразователя 14 по одинаковым, но обратным по величине законамполиномиальной зависимости типа t.:/, - : где а- - постоянные коэффициенты , п - четные и нечетные числа, в том числе и равные 1j - ток подмагничивания. Чтобы исключить вклад в индукцию поля подмагничивания нелинейностей, возникающих при управлении углом отпирания тиристоров, выходное напряжение формирователя 18 сигнала управления током подмагничивания изменяется по косинусоидальному закону. Функционально формирователь 18 может быть выполнен из следующих поседовательно соединенных стандартных узлов: детектора, усилителя, генератора пилы, порогового и выходного устройств. Формирователь ожет иметь один или два управляюих входа и управлять соответственно периодом следования, и амплитудой выходных импульсов. В вибростенде использован формирователь с двумя управляющими входами. По первому входу формирователя 18 осуществляется управление периодом следовани выходных импульсов по закону измен ния сигнала измеритель-преобразова теля 10 тока возбуждения. По второ му входу формирователя, осуществляется управление амплитудой выходных импульсов по закону изменения выходного сигнала второго канала программатора 2А. . С целью упрощений конструктивного исполнения программатор 24 мо жет быть выполнен в виде последовательно соединенных управляемого источника 25 опорного напряжения, калибруемого регулятора уровня воз буждения 26 и двух делителей 27 выходных напряжений, соединенных между собой параллельно, на вход которых подключен показываю1ций при бор 28. Для уменьшения динамической погрешности испытаний за-счет конечного значения постоянной-времени канала подмагничивания входное напряжение первого канала формирователя 18 изменяется по закону изменения огибающей сигнала тока возбуждения, а величина вытапкиваю щего усилия вибратЬра,определяемая по показывающему прибору 28, измеряется при нулевом сигнале оши по нуль-органу 22. При нулевом сигнале ошибки срабатывает пусковое устройство 23, дистанционно управляющее силовым приводом регистратора 21 уровня вибраций. Пусковое устройство состоит из диодного моста и управляемого ключа. Одновременно с включением силового привода осуществляет ся запуск развертки частоты генератора 8 и измерение уровня виброускорения в точке установки задающего ВИП. Пр.и отличном от нуля сиг нале ошибки пусковое устройство 23 не срабатывает. Подбором величин скоростей развертки частоты и компрессии задающего генератора 8 сигнал ошибки можно уменьшить и осуществить пуск регистратора 21. При калибровке регистратор 21 переводится в режим автономного пу ка. На фиг. 4 представлены зависимо ти выталкивающего усилия и уровней виброускорения, измеряемых первым ВИП 15 от частоты возбуждения при использовании вибростенда для режима испытаний тяжелых объектов, где 1 - виброускорение, измеряемое первым ВИП ;При стабилизации выталкивающего усилия вибратора на постоянном уровне, 2 - уровень виброуско-. рения п, заданный программой испытаний, 3 - изменение выталкивающего усилия в окрестности резонансных f и антирезонансных f частот системы вибратор - обьект устройством управления вибростенда, 4 уровень ускорения при изменении выталкивающего усилия в соответствии с зависимостью 3. На фиг. 5 представлены.зависимости выталкивающего усилия и уровней виброускорения, измеряемых вторым ВИП 16 QT частоты возбуждения при использовании вибростенда для режима испытаний тяжелых объектов, 1де обозначения аналогичны фиг. 4. Кзк видно из зависимостей (фиг. 4 и 5), вибростенд обеспечивает увеличение точности результатов испытаний за счет ослабления взаимного влияния импедансов об.ъекта и вибратора посредством стабилизации изменений тока возбуждения противофазными изменениями тока подмагничивания, величина которого не зависит от частоты возбуждения, и управлением по каналам возбуждения и подмагничивания по закону, обратному изменению уровня виброускорения на резонансных частотах в заданной точке объекта. Вибростенд обеспечивает управление произведением величин РрП . При испытаниях двух массовых систем и управлении произведением величин переиспытания или недоиспытания ниже, чем при управлении величиной F / F,j . Экспериментальная проверка функционирования вибростенда показала, что совпадение между расчетными значениями и результатами испытаний при воспроизведении управляемого силового воздействия с уровнем перегрузки, заданным программой испытаний, в диапазоне частот 30-2000 Гц при испытаниях как легких, так и тяжелых относительно массы подвижной системы вибратора объектов на 40% ближе к расчетным, чем при кинематическом управлении.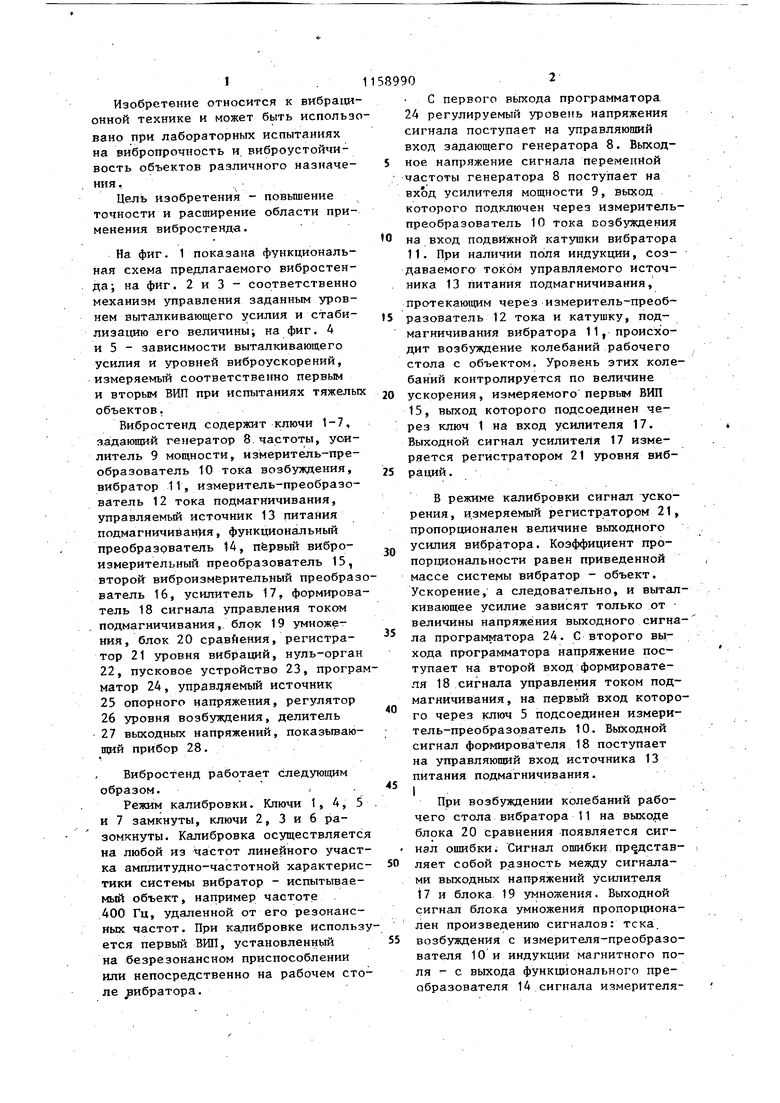
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибростенд | 1986 |
|
SU1355885A1 |
| Устройство для измерения вибрационных характеристик | 1988 |
|
SU1642260A1 |
| Виброиспытательная система | 1989 |
|
SU1677534A1 |
| Устройство для контроля разрушения изделия при испытании на автоколебательном вибростенде | 1984 |
|
SU1298567A1 |
| Способ измерения статодинамических параметров изделий при воздействии вибрации и температуры | 1988 |
|
SU1677533A1 |
| Испытательный вибростенд | 1974 |
|
SU945704A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВАМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИККОНСТРУКТИВНЫХ ЭЛЕМ1ЕНТОВ МАШИНИ МЕХАНИЗМОВ12 | 1972 |
|
SU412513A1 |
| УСТРОЙСТВО ДЛЯ УСТАЛОСТНЫХ ИСПЫТАНИЙ ПАРТИИ ИЗДЕЛИЙ НА РЕЗОНАТОРАХ | 1991 |
|
RU2032165C1 |
| Устройство для определения резонансных частот объекта | 1990 |
|
SU1744554A1 |
| Устройство для обнаружения резонансной частоты объекта | 1985 |
|
SU1254310A1 |
ВИБРОСТЕВД, содержащий первьй виброизмернтедьный преобразователь, установленный на вибраторе и подключенный через первый ключ к входу усилителя, связанного выходом с первым входом регистратора уровня вибраций,, последовательно соединенные задающий генератор частоты и усилитель.мощности, а также последовательно соединенные формирователь сигнала управления током подмагничивания и управляемый источник питайия подмагничивания, отличающийся тем, что, с целью повьшения точности и расширения области применения вибростенда, он содержит последовательно соединенные второй виброизмерительный преобразователь, установленный на объекте ... ,i - - ..:л;2 ИЬ Ш&1ШАиспытаний, и второй ключ, последовательно соединенные третий ключ, програмг-iaTop и четвертый ключ, пос-ледовательно соединенные измерительпреобразователь тока подмагничивания, функциональный преобразователь, блок умножения, блок сравнения и нуль-орган, а также пятый, шестой, седьмой ключи и измеритель-преобразователь тока возбуждения, вход которого подключен к выходу усилителя мощности, а выход - к второму входу блока умножения, к первому входу вибратора и через пятый ключ - к первому входу формирователя сигнала управления током подмагничивания, соединенного вторым входом с выхо(Л дом четвертого ключа, вход измерителя-преобразователя тока подмагничивания связан с выходом управляемого источника питания подмагничивания, а выход - с вторым входом вибратора, второй, выход программатора подключен к входу задающего генеСП ратора частоты, а третий выход 00 через шестой ключ - к второму входу блока сравнения и через со со седьмой ключ - к выходу усилителя, выход нуль -органа соединен с вторым входом регистратора уровня вибраций. 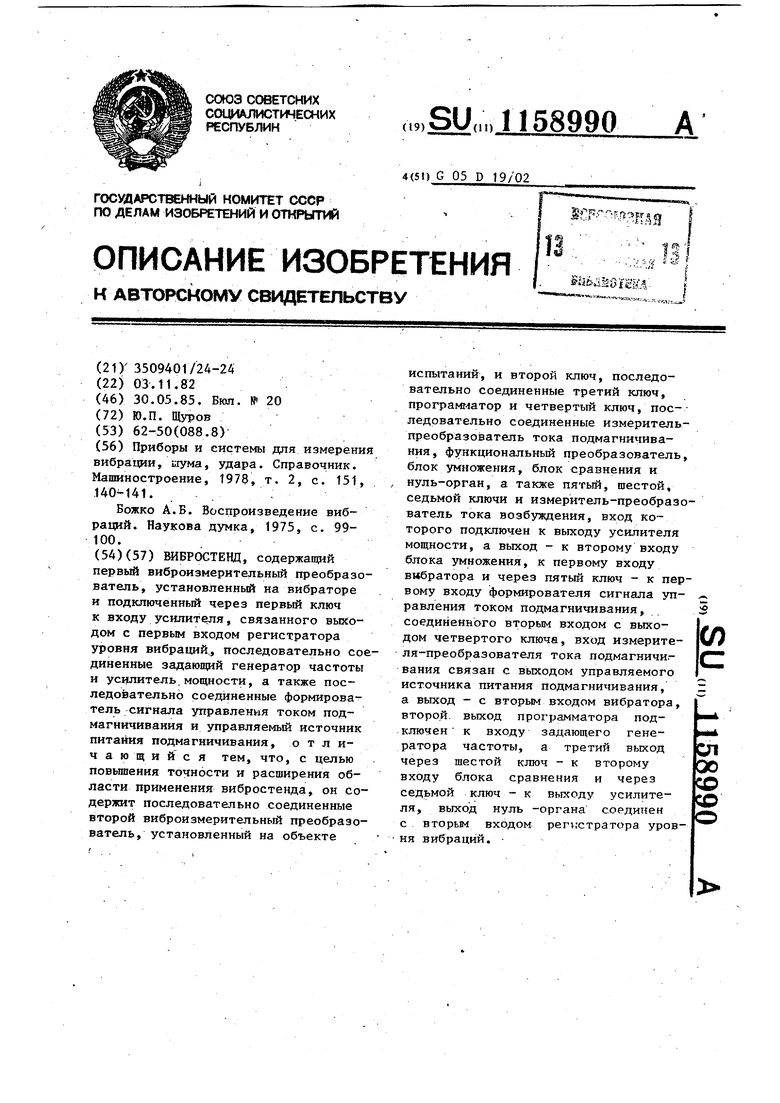
| Приборы и системы для измерения вибрации, ь1ума, удара | |||
| Справочник | |||
| Машиностроение, 1978, т, 2, с | |||
| Двухколейная подвесная дорога | 1919 |
|
SU151A1 |
| Вожко А.Б | |||
| Воспроизведение вибраций | |||
| Наукова думка, 1975, с | |||
| Способ определения концентрации парообразного стирола в воздухе | 1952 |
|
SU99100A1 |
