1
Изобретение относится к TBICC- тильной промьппленности, конкретнее к устройствам управления рабочими органами, например органами, осуществляющими регулирование плотности уточных нитей.
Цель изобретения - повьпиение тоности управления путем коррекции , времени-: транспортного запазда1ванйя сигнала от места из)мерения к месту приложения регулирующего воздействия в зависимости от натяжения ткани.
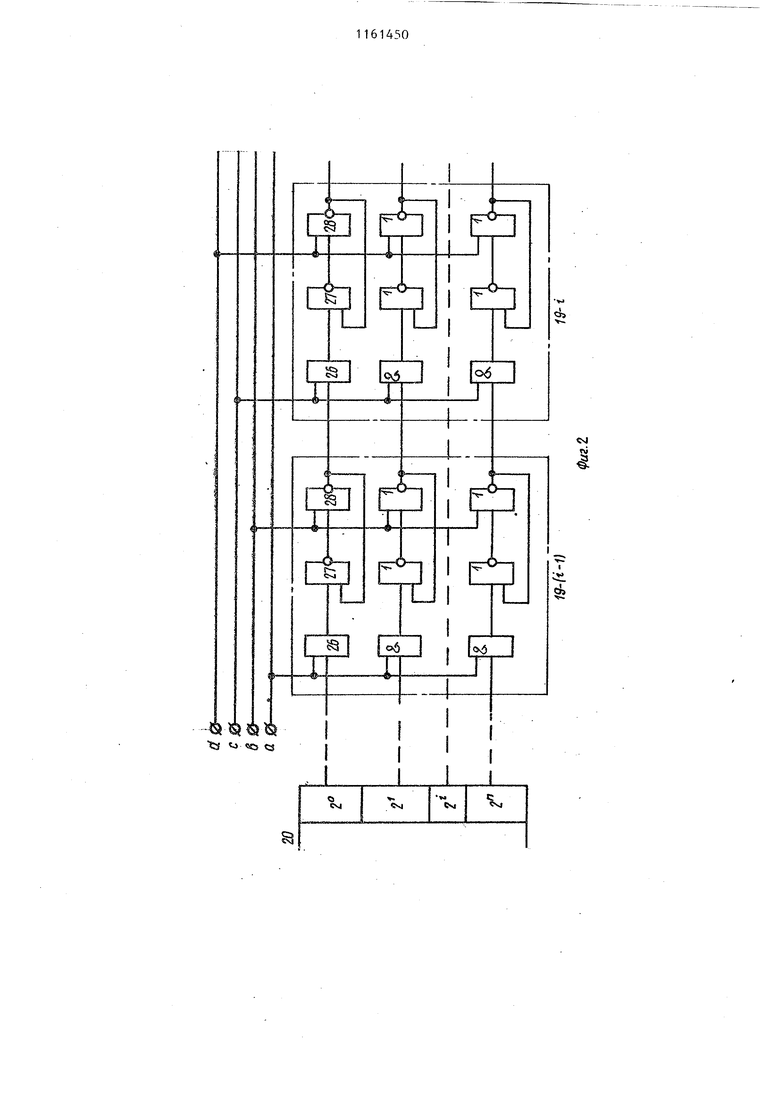
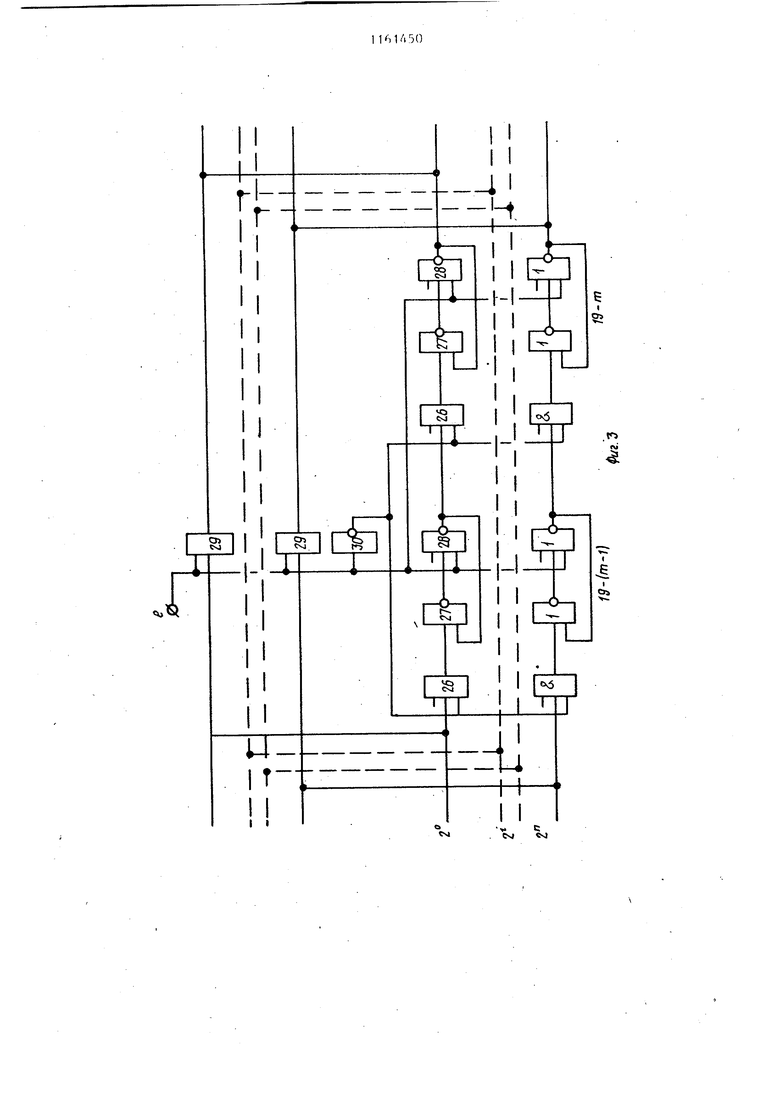
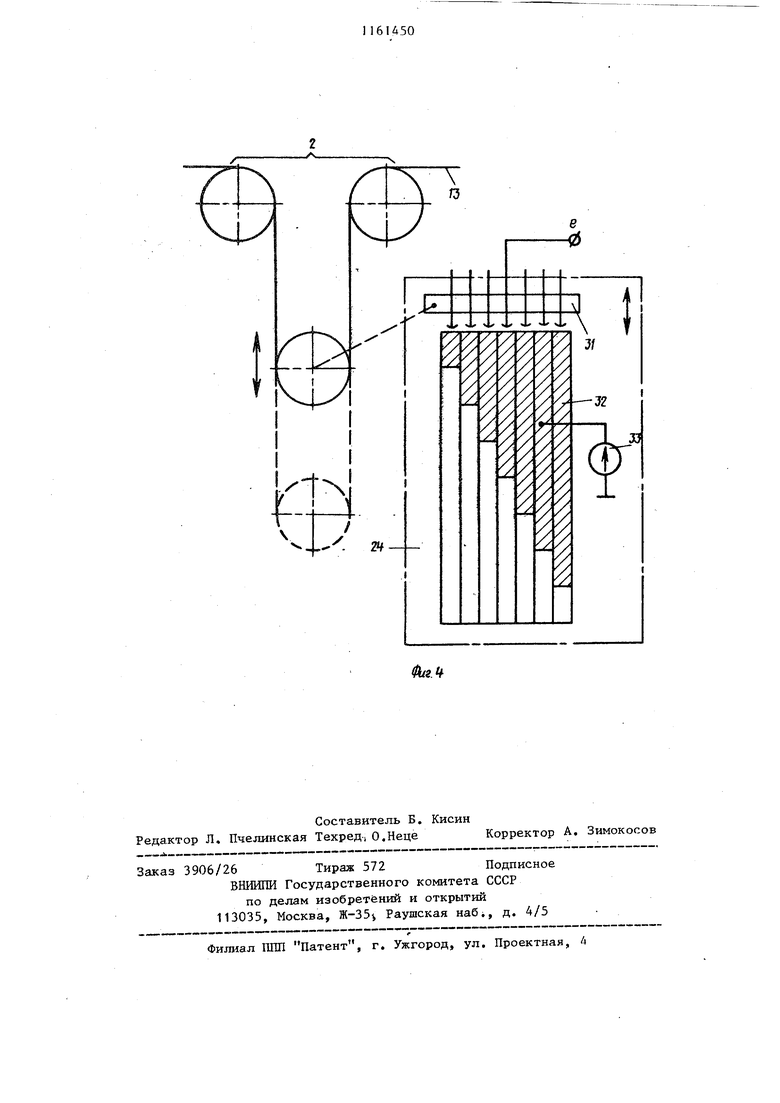
На фиг. 1 изображена комбинированная схема устройства управления рабочим органом (например, опережающим валом при регулировании плотности ткани) на линии заключительной отделки; на фиг. 2 схема, отражающая состав и соединение сдвигающих регистров; на фиг. 3 - схема присоединения одного из логических шунтов к сдвигающ регистрам; на фиг. 4 - многопозиционный датчик натяжения ткани (положения роликового компенсатора вариант выполнения.
Рассмотрим устройство управления рабочим органом на примере его работы в составе линии заключительной отделки при управлении, например, плотностью уточных нитей
Линия заключительной отделки содержит в своем составе плюсовку 1, роликовый компенсатор 2, автома 3 правки перекоса уточных нитей и сунмльно-ширильную стабилизационную машину 4. Воздействие на плотность уточных нитей осуществляется путем изменения линейной скорости опережающего вала 5 (рабочего органа) относительно линейной скорости цепного транспортера 6 посредством вариатора 7 и, соответственно, исполнительного органа 8, воздействующего на управляющий вал вариатора.
Система управления содержит датчик 9 плотности уточных нитей, соединенных с преобразователем 10 сигнала, и датчик 11 длины ткани,связанный с контрольным роликом 12, который без проскальзьюания перемещает ткань 13. Датчик 11 длины ткани содержит пары датчиков импульсов и диск 14 ; с меткой, совмещение ко-Ьорой с датчиком импульсо обеспечивает импульс на выходе дат614502
чика. Функционально в каждой паре датчиков импульсов имеются.датчики 15 и 16 записи и стирания 17 и 18, обеспечивакмцие соответственно запись 5 и стирание информации в регистрах 19-1 - 19-п блока сдвигающих регистров, причем датчики 15 и 17 импульсов обеспечивают запись и стирание информации в нечетных регистрах, а
0 датчики 16 и 18 - в четных. Первый регистр.блока сдвигаклцих регистров, т.е. регистр 19-1, присоединен к выходу элемента 20 сравнения, где происходит суммирование выходного сигнала
5 преобразователя 10 и выходного сигнала задатчика 21 плотности ткани по утку с-учетом знака. Выход блока сдвигающих регистров, т.е. регистр 19-п, присоединен к входу блока 22
0 управления корректора изменения плотности ткани по утку, которьй определяет функциональную зависимость величины опережения от отклонения текущего значения плотности уточных
5 нитей, определяемого датчиком 9, от заданного задатчиком 21, т.е. преобразует отклонение плотности уточных нитей в величину опережения. Вькод блока 22 соединен с входом
0 органа 8, которьй является следящей - системой управляющего вала вариатора, а сигнал с выхода блока 22 является задающим сигналом следящей системы. Положение управляющего вала вариатора однозначно определяет величину опережения, т.е. разность линейных скоростей опережающего вала 5 и цепного транспортера 6. Вариатор 7 и исполнительное устройство 8 образуют
0 корректор изменения плотности утка в ткани. Ролик 23 компенсатора 2 связан с многопозиционным датчиком 24 натяжения ткани (дискретным датчиком положения компенсатора), выходы
5 которого присоединены к,блоку 25 выбора числа работанщих регистров. Блок 25 выбора числа рабЬтакнцих регистров шунтирует соответствующие пары регистров, изменяя длину блока сдвиQ гающих регистров в зависимости от положения компенсатора, т.е. в соответствии с изменением длины ткани от точки.измерения до точки воздействия. Каждый разряд регистра 19-1 - 19-п
5 блока сдвигающих регистров содержит последовательную цепочку из элемента И 26 и двух.элементов 27 и 28, охваченных обратной связью и реализующих 3 каждый операцию ИЛИ-ИЕ, а вместе с обратной связью - функцию Память Сигнал на разрешение записи информа ции от предыдущего регистра подаетс на элемент 26 для нечетных регистров посредством шины о( от датчика 15 импульсов, а для четных регистров - посредством шины с от датчика 16 импульсов. Сброс информации (обнуление регистра) осуществляется посредством передачи сигнала на вход последнего элемента ШМ-НЕ 28 для нечетных регистров посредством шины Ь от датчиков 17, а для четных - посредством шины d от датчика 18. Блок 25 выбора числа работающих регистров состоит из последовательной цепочки логических «гунтов, числ которых в два раза меньше числа регистров в блоке сдвигающих регистров, аКаждый из логических шунто содержит группу элементов И 29, чис ленно равную числу разрядов одного регистра из блока сдвигающих регистров, и элемент НЕ 30. Поразрядными информационными входами логического шунта являются входы элементов И 29, а поразрядными информационными выходами являются выходы соответствующих элементо-в И 29. Информационные входы логического шунта поразрядно присоединены к информационным входам одного из нечетных (по ходу следования информации) регистров, а выходы - к выхо дам следующего за ним четного регистра. Другие входы элементов И 29 логического шунта являются управляЮ1ЦИМИ и присоединены к одному из выходов многопозиционного датчика 24 натяжения ткани - дискретного датчика положения компенсатора (в качестве примера на фиг. 3 приведен логический шунт, присоединенный посредством шины е к выходу е дискретного датчика 24 положения компенсатора, изображенного на фиг. 4) Этот же выход дискретного датчика п ложения компенсатора присоединен к всем стирающим входам (к дополнительным входам элементов ИЛИ-НЕ 28) нечетного и четного регистров. Элемент НЕ 30 логического шунта присое динен входом к выходу е датчика 24, а выходом - к всем дополнительным управлякнцим входам элементов И 26 нечетного и четного регистров. 504 Дискрет 1ый датчик положения компенсатора (многопозиционный датчик 24 натяжения) состоит из траверсы 31 со щeткa ш, контактного поля 32 и источника 33 питания. Траверса жестко присоединена к оси ролика компенсатора и имеет возможность пере мещаться вместе с роликом. Контактное поле имеет проводящую и непроводящую части. К проводящей части одним из полюсов присоединен источник питания. При перемещении ролика компенсатора траверса со щетками . перемещается по контактному полю, что соответственно ведет к замыканию или размыканию соответствующих щеток. При соприкосновении щетки с проводящей частью в шине, соединенной с этой щеткой, возникает сигнал. который включает в работу соответствующий шунт. Устройство работает следующим образом. Измеренное датчиком 9 и преобразованное преобразователем 10 значение текущей плотности уточных нитей подается в элемент 20 сравнения, где (с учетом знака) происходит алгебраическое суммирование заданного значения из задатчика 21 плотности уточных нитей и текущего значения. Разность этих значений в виде параллельного кода появляется на выходе элемента 20 сравнения. Одновременно происхо дит вращение диска 14 с меткой датчика 11 длины ткани. Метка проходит соответственно датчики 17, 16, 18, 15... и т.д. При совпадении метки с датчиком 17 происходит обнуление всех нечетных регистров. Совпадение метки с датчиком 15 приводит к записи в первый регистр 19-1 значения выходной величины элемента 20 сравнения. При дальнейшем вращении диска 14 метка совмещается с датчиком 18, обеспечивая стирание информации во всех четных регистрах блока, а затем датчик 16 обеспечивает перепись из первого регистра 19-1 во второй 19-2. При дальнейшемвращении метка совпадает с датчиком 17,что обеспечивает стирание информации в нечетных регистрах, в том числе и в первом, датчик 15 обеспечивает запись информации из элемента 20 сравнения в первый регистр 19-1 и перепись информации из второго регистDa 19-2 в третий 19-3, датчик 18
s
стирает информацию в четных регистрах, а датчик 16 обеспечивает перепись новой информации из первого регистра во второй, а из третьего в четвертый и т.д.
Таким образом, датчик It длины ткани управляет последовательной передачей параллельного кода по цепочке регистров, и поскольку датчик длины.связан с перемещающейся ткань 13, то эта передача информации осуществляется строго в темпе с движение1М ткани, т.е. сигнал на изменени величины опережения поступает на исполнительное устройство 8 одновремено с моментом прихода соответствующего участка ткани к опережающему валу 5.
При изменениях положения компенсатора 2 на выходах датчика положения компенсатора (многопозиционного датчика 24 натяжения) возникают сигналы. Наличие сигнала на каком-либо выходе датчика положения компенсатора обеспечивает включение соответствующего логического шунта и исключение из цепочки передачи информации соответствующей пары регистров блока -сдвигающих регистров. Это происходит следующим образом.
При. возникновении сигнала, например, на выходе е датчика положения компенсатора сигнал по шине е подается на управляющие входы элементов И 29 логического шунта, тем самым разрешается следовадае
614506
двоичной информации с выхода регистра 19-(т-2) на выход регистра 19-(m-l). Кроме того, сигнал по пшне е подается на все дополнитель5 ные входы элементов ИЛИ-НЕ 28 регистров 19-(т-1) и 19-тп, тем самым обеспечивая отсутствие сигнала во всех юс выходных разрядах. Одновременно сигнал на шине е , подключенной к входу элемента НЕ 30, приводит к исчезновению сигнала на выходе элемента НЕ 30 и соответственно на входах элементов И 26 во всех разрядах регистров 19-(т-1) и 15 19-т, что обеспечивает запрет записи информации в регистры 19-(т-1) и 19-т. Таким образом, при наличии сигнала на шине е исключается передача цифровой инфор-
20 мации через регистры 19-(т-1) и
19-т, а информация посредством логического шунта,содержащего элементьГ И 29, передается с выхода регистра 19-(т-2) на вход регистра
25 19-(т+1) в обход регистров 19-(т-1) и 19-т. Аналогично работают, и другие логические шунты, присоединенные к другим выходам датчика 24.
При изменениях положения компенсатора 2 происходит шунтирование или расшунтирование регистров блока сдвигающих регистров, что изменяет длину цепочки регистров и, соответственно, длину пути следования инфорJ5 мации в соответствии с изменениями длины ткани между точками измерения и воздействия.
rfa
I
-1
5
o
en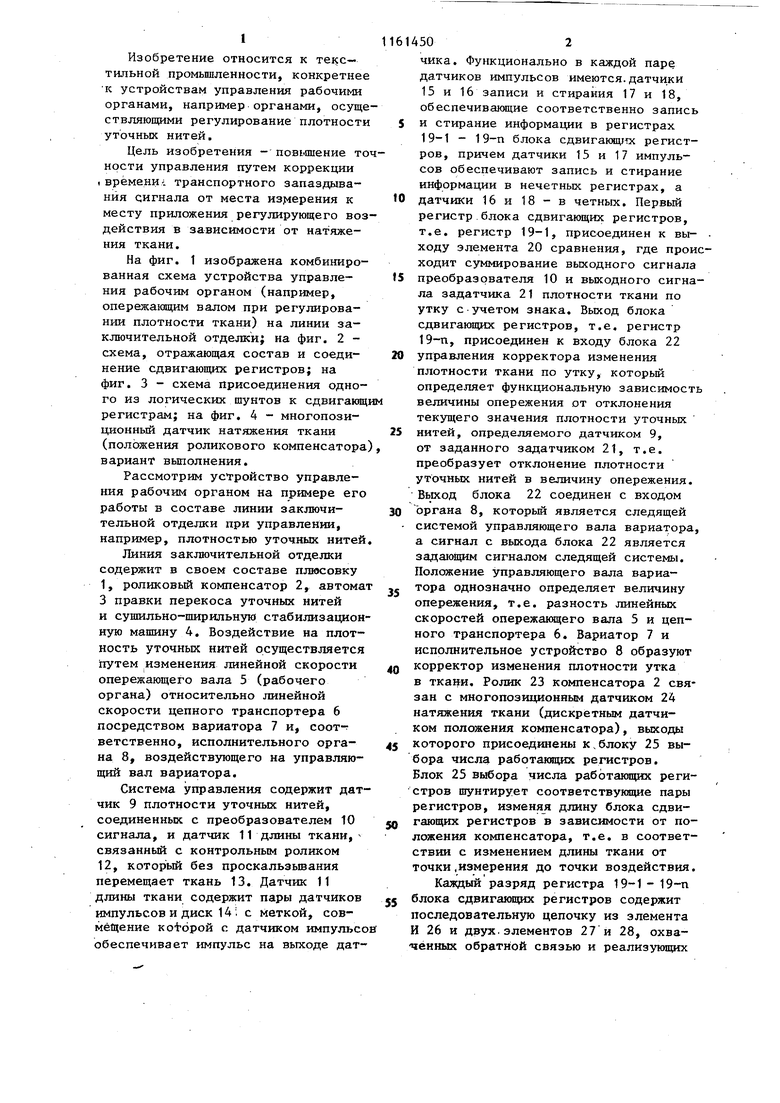
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля плотности ткани | 1985 |
|
SU1452866A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЛОТНОСТИ ТКАНИ ПО УТКУ И ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛИНЫ УЧАСТКА, ПРОЙДЕННОГО ТКАНЬЮ В ПРОЦЕССЕ РАБОТЫ ТКАЦКОГО СТАНКА | 2012 |
|
RU2482231C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТКАНЕЙ ПОПЕРЕЧНЫХ ЗИГЗАГООБРАЗНЫХ ТЕНЕВЫХ ПЕРЕПЛЕТЕНИЙ | 2015 |
|
RU2642725C2 |
| Способ контроля уточной нити на ткацком станке с челноком-захватом | 1978 |
|
SU950822A1 |
| Устройство для определения плотности ткани | 1981 |
|
SU1011742A1 |
| Устройство для измерения частоты вращения | 1989 |
|
SU1666964A1 |
| СПОСОБ ПОЛУЧЕНИЯ ТКАНЕЙ ПРОДОЛЬНЫХ ЗИГЗАГООБРАЗНЫХ ТЕНЕВЫХ ПЕРЕПЛЕТЕНИЙ | 2015 |
|
RU2605379C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЛОТНОСТИ ТКАНИ ПО УТКУ | 2013 |
|
RU2552026C1 |
| МНОГОКАНАЛЬНЫЙ КОРРЕЛЯТОР С УСРЕДНЕНИЕМ | 1967 |
|
SU190097A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЛОТНОСТИ ТКАНИ ПО УТКУ | 2003 |
|
RU2264487C2 |
1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ, преимущественно при регулировании плотности ткани, содержащее датчик и задатчик плотности ткани по утку, через элемент сравнения поразрядно связанные с соответствующими входами первого регистра блока сдвигающих регистров, выход последнего из которых подключен к блоку управления корректора изменения плотности утка в ткани, и импульсный датчик длины ткани, соответствующие выходы которого подключены к запйсьшающим и сбросовым входам регистров блока сдвигающих регистров, отличающееся тем что, с целью повьшения точности управления путем коррекции времени транспортного запаздывания сигнала от места измерения к месту приложения регулирующего воздействия в зависимости от натяжения ткани, оно имеет многопозиционный датчик натяжения ткани и блок выбора числа работающих регистров, при этом выходы многопозиционного датчика натяжения ткани связаны со сбросовыми входами соответствуюпщх регистров блока сдвигающих регистров и соответствующими входами блока выбора числа работающих регистров, выходы которого подключены к соответствующим управляющим входам регистров блока сдвигающих регистров. 2. Устройство по п. 1, отлич ающееся тем, что блок выбора числа работающих регистров состоит из логических щунтов, число которых в два раза меньше числа регистров в блоке сдвигающих регист(Л ров и каждый из которых содержит элемент НЕ и группу элементов И, численно равную числу разрядов одного регистра, при этом первый вход каждого элемента И подключен к соответствующему входуодного нечетного регистра, вторые входы элементов И О5 каждой группы связаны с одним выходом многопозиционного датчика натяжения ткани, а выходы элементов И соединены с соответствующими выхосл дами следующего за нечетным четного регистра, причем соответствующий выход датчика натяжения тка ни через соответствующий элемент НЕ связан с управляющими входами соседних нечетного и четного регистров блока сдвигающих регистров.
ii
r a
0
«41
I
I
Д t
Oa
fl
|T
:.1
14 IT
I I
о
Vt
«M
es( «si
| Устройство для управления рабочим органом | 1976 |
|
SU592897A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
