ключения, включенный между выходами трехкомпонеитного датчика и входами квдраторов,между выходом блока извлечен кц.чдратного корня и первым входом регистратора включены последовательно временной селектор, первый R5 триггер, 6 -вход которого соединен с первым выходом трехкомпонентного датчика через.введенный пороговый блок, и первый интегратор, между выходом блока извлечения квадратного корня и вторым входом регистратора последовательно включены первый компаратор, второй вход которого соединен с четвертым выходом блока программного переключения, второй RS -триггер и второй интегратор, при этом 5-вход второго RS -триггера соединен с выходом введенного второго компЗратора, первый вход которого соединен с первым входом первого компаратора, а второй - с пятым выходом блока программного переключения.
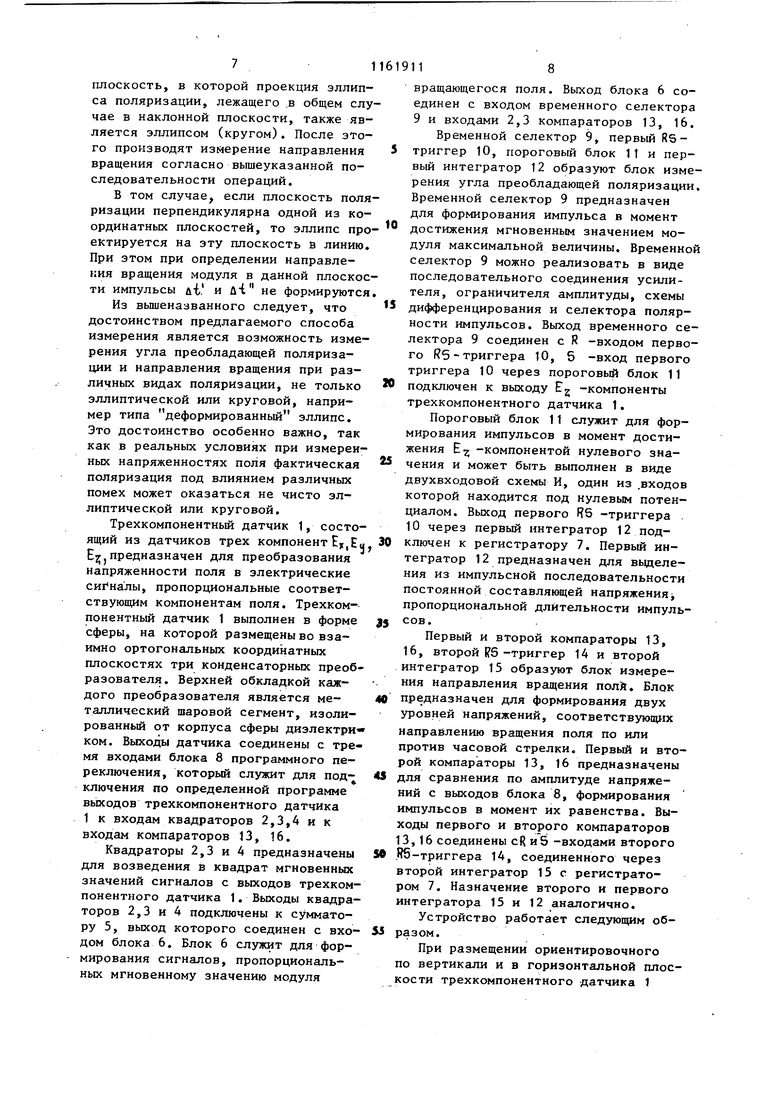
3. Устройство по п.2, о т л ичающееся тем, что блок программного переключения содержит первый, второй и третий нормально замкнутые ключи и первый, второй, третий, четвертый, пятый и шестой нормально разомкнутые ключи, при
этом вход первого нормально замкнутого ключа является первым входом блока программного переключения, а его выход - первым выходом блока программного переключения и соединен с входами пятого и третьего нормально разомкнутых ключей, вход второго нормально замкнутого ключа является вторым входом блока программного переключения и соединен с входом первого нормально разомкнутого ключа, а его выход - вторым выходом блока программного переключения и соединен с входом шестого нормально разомкнутого ключа, вход третьего нормально замкнутого ключа является третьим входом блока программного переключения и соединен с входами четвертого и второго нормально разомкнутых ключей, выход третьего нормально разомкнутого ключа является четвертым выходом блока программного переключения и соединен с выходами первого и второго нормально разомкнутых ключей, выход шестого нормально разомкнутого ключа является пятым выходом блока программного переключения и соединен с выходом четвертого и пятого нормально разомкнутых ключей.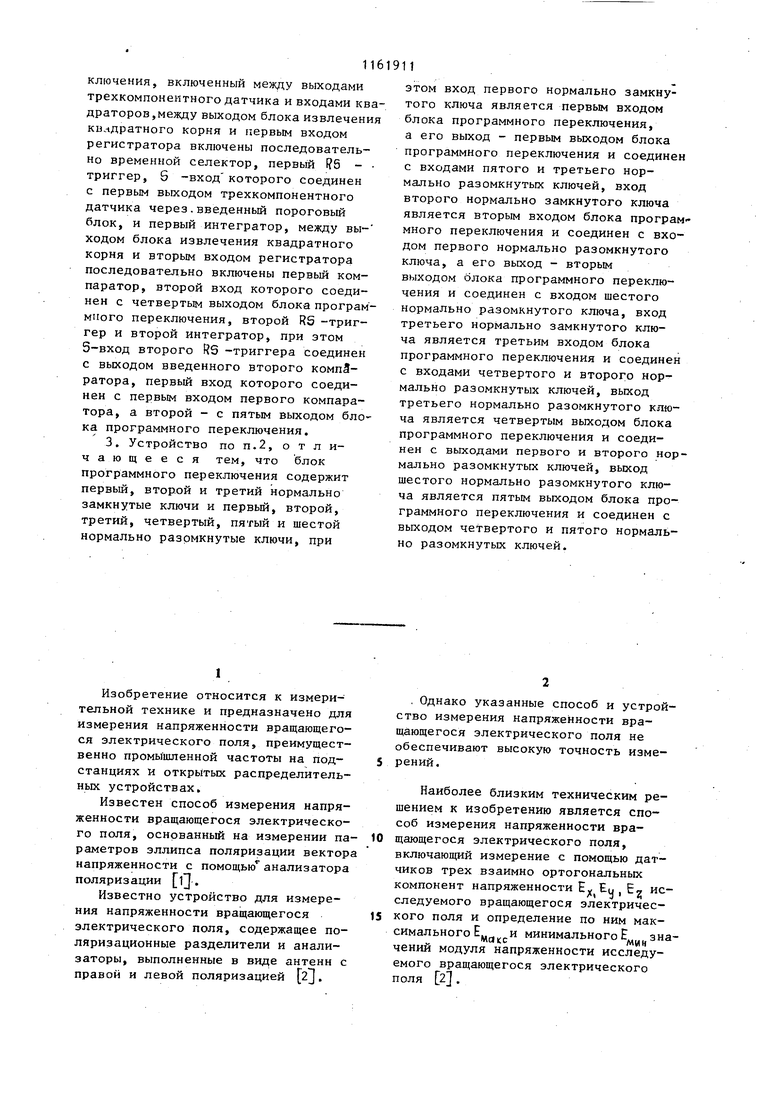
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство распознавания сейсмических сигналов | 1980 |
|
SU1000971A1 |
| Устройство для учета движущихся объектов | 1985 |
|
SU1278908A1 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КОЛЕС | 1991 |
|
RU2036449C1 |
| Бесконтактный профилометр для контроля микрогеометрии коллекторов электрических машин | 1988 |
|
SU1538035A2 |
| АНАЛОГОВЫЙ ИНТЕГРАТОР | 2014 |
|
RU2571618C1 |
| Устройство для измерения логарифмического декремента затухания | 1987 |
|
SU1446485A1 |
| Магнитооптический способ регистрации динамических петель магнитного гистерезиса и устройство для его осуществления | 1983 |
|
SU1158950A1 |
| Адаптивное телеизмерительное устройство | 1975 |
|
SU608186A1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СРЕДНЕКВАДРАТИЧЕСКОГО ЗНАЧЕНИЯ НАПРЯЖЕНИЯ | 2000 |
|
RU2198410C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МАРКИРОВАНИЯ И УПРАВЛЕНИЯ ВНУТРИТРУБНЫМИ ОБЪЕКТАМИ | 2002 |
|
RU2215932C1 |
1. Способ измерения напряженности вращающегося электрического поля, включающий измерение с помощью да1 чиков трех взаимно ортогональных компонент напряженности EjijEttj Eg исследуемого вращающегося электрического поля и определение по ним- максимального Ejjgj j. и минимального Е,ц,значений модуля напряженности исследуемого вращающегося электрического поля, от л и ч а ю щ и и с я тем, что, с целью по- вьшения точности измерений путем определения угла преобладающей поляризации и направления вращения, в процессе измерений датчики ориентируют в вертикальной и горизонтальной плоскостях относительно Земли, фиксируют момент достижения макси8геглт.ч«.| 13,:;::;«13 &1&ЛНиТЕиА мального значенияЕ|,д модуля напряженности исследуемого вращающегося электрического поля и измеряют время bt до достижения нулевого значения МОДУЛЯ Е компоненты напряженности вращающегося электрического поля, определяют по измеренной величине at угол ( преобладающей поляризации по формуле , мин , , и агсг6-,tpO)ut, .c где со - круговая частота исследуемого вращающегося электрического поля, затем по величинам измеренных компонент ЕХ, Еу, ЕТ; модуля напряженности исследуемого вращающегося электрического поля определяют координатную плоскость, в которой модуль напряженности исследуемого вращающегося электрического поля поляризован эллиптически или по кругу, при этом минимальное значение разности зафиксированных моментов времени соответствует правому вращению исследуемого вращающегося электрического поля, а максимальная разность - левому вращению. 2. Устройство для измерения напряженности вращающегося электрического поля, содержащее трехкомпонентньй датчик, три квадратора, выходы которых через сумматор соединены с входом блока извлечения квадратного корня, и регистратор, о т л и -. чающееся тем, что, с целью повышения точности измерений путем определения угла преобладающей поляризации и направления вращения, в него введен блок программного пере
1
Изобретение относится к измерительной технике и предназначено для измерения напряженности вращающегося электрического поля, преимущественно промышленной частоты на подстанциях и открытых распределительных устройствах.
Известен способ измерения напряженности вращающегося электрического поля, основанный на измерении параметров эллипса поляризации вектор напряженности с помощью анализатора поляризации l.
Известно устройство для измерения напряженности вращающегося электрического поля, содержащее поляризационные разделители и анализаторы, выполненные в виде антенн с правой и левой поляризацией 2j.
. Однако указанные способ и устройство измерения напряженности вращающегося электрического поля не обеспечивают высокую точность измерений.
Наиболее близким техническим решением к изобретению является способ измерения напряженности вра-
щающегося электрического поля,
включающий измерение с помощью датчиков трех взаимно ортогональньк компонент напряженности Е. Ец , Ejr исследуемого вращающегося электрического поля и определение по ним максимального Е..„ и минимального Е.,,, знаrnCt КСfn flЦ
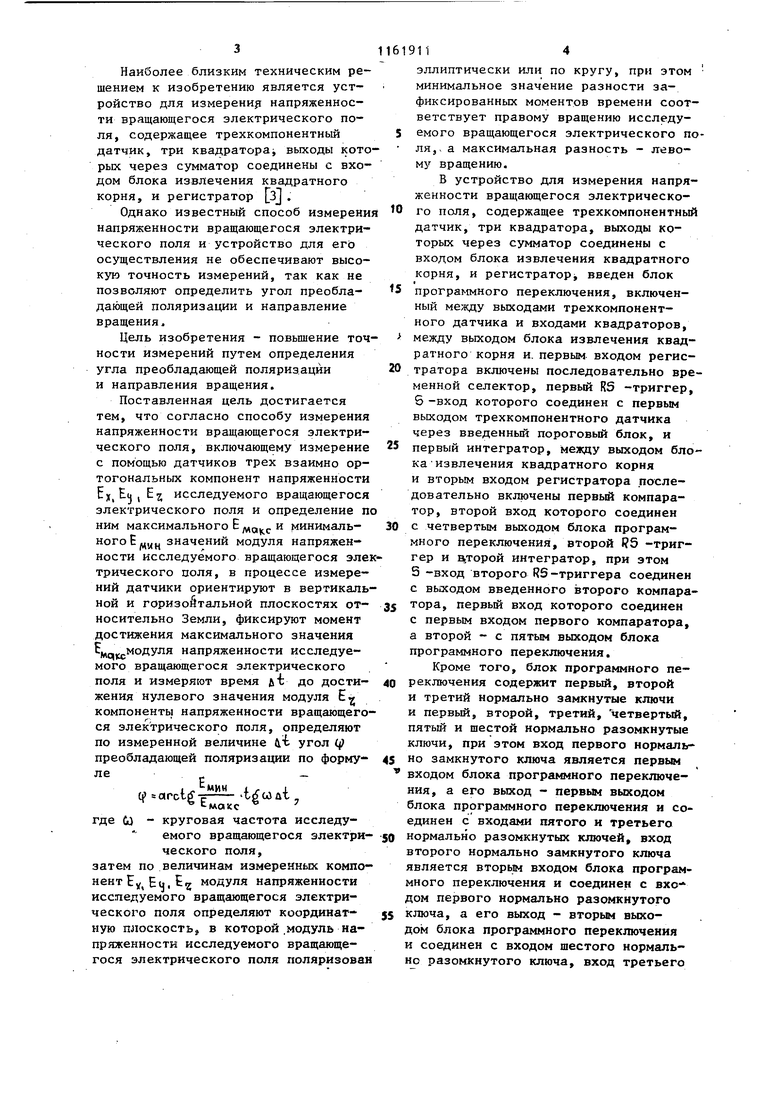
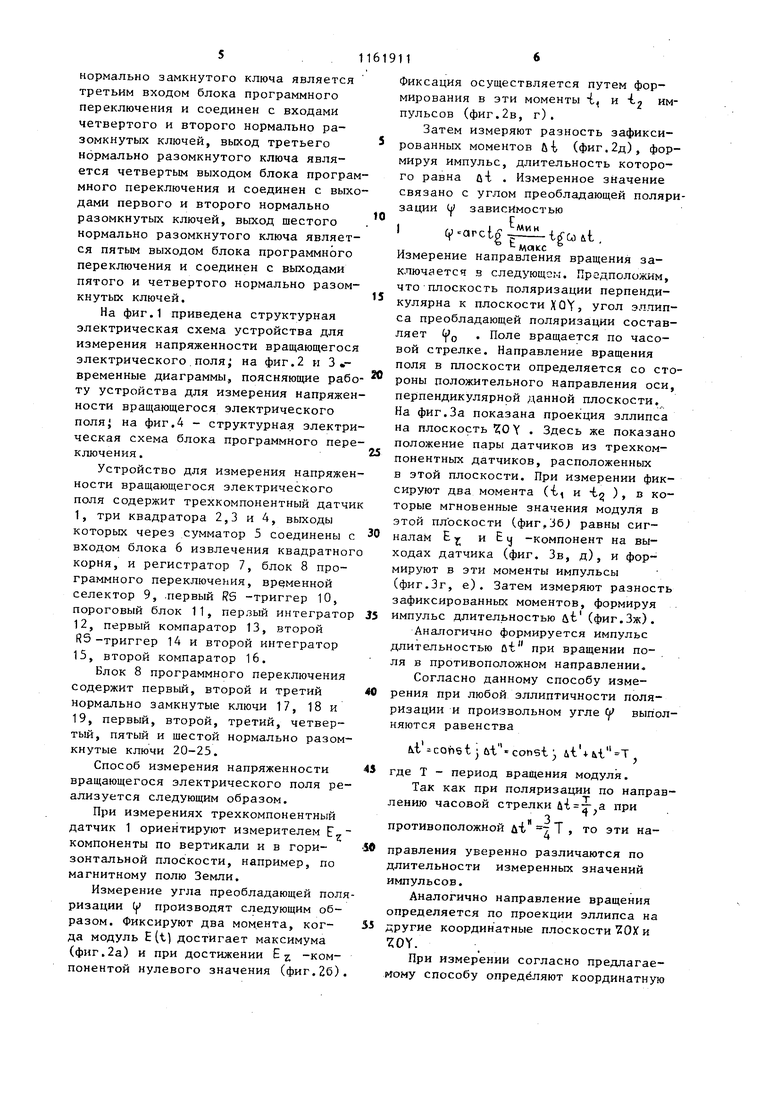
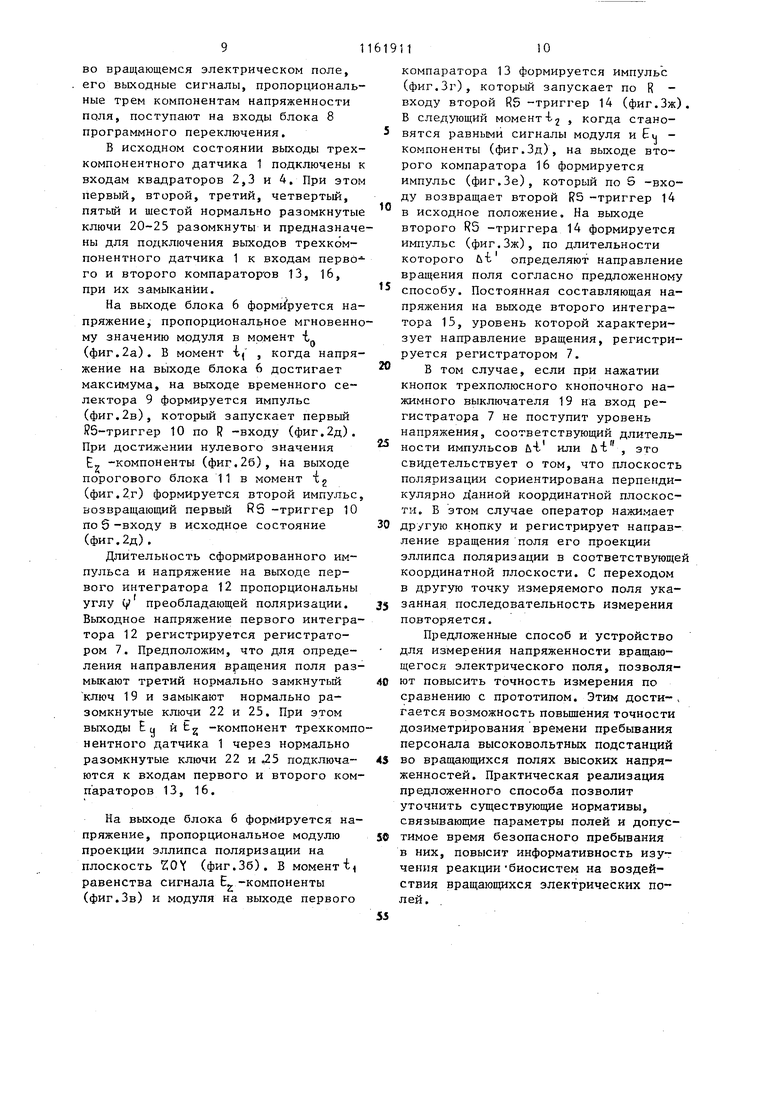
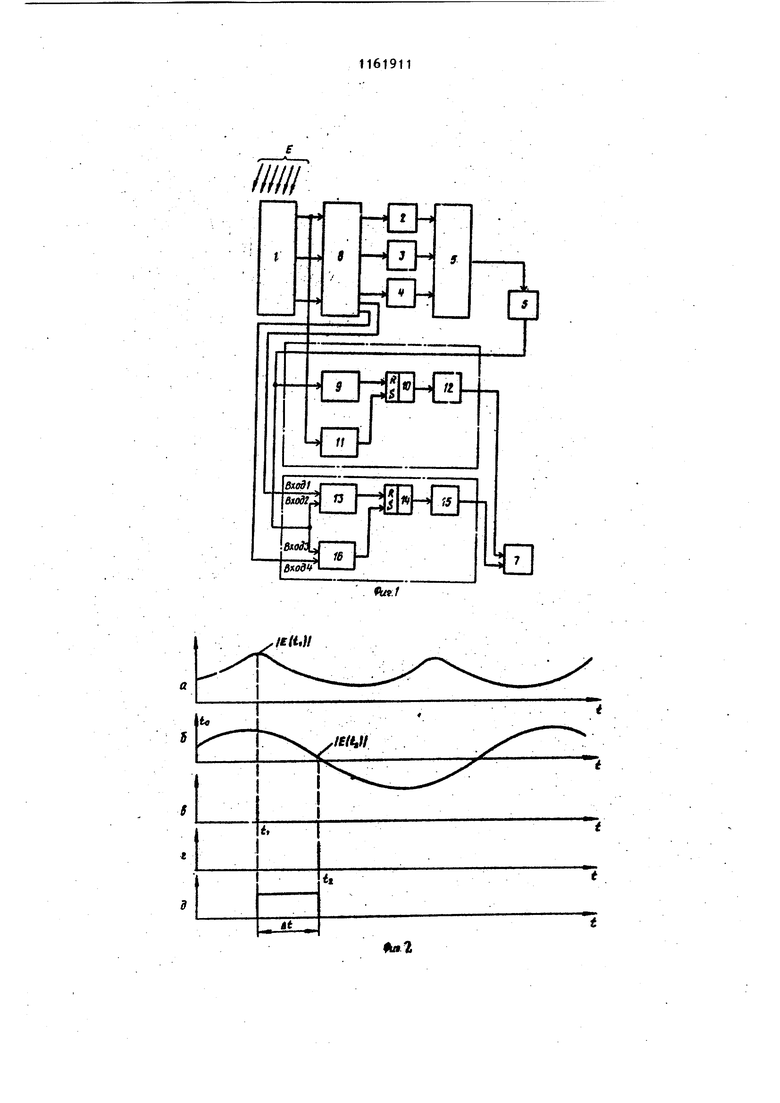
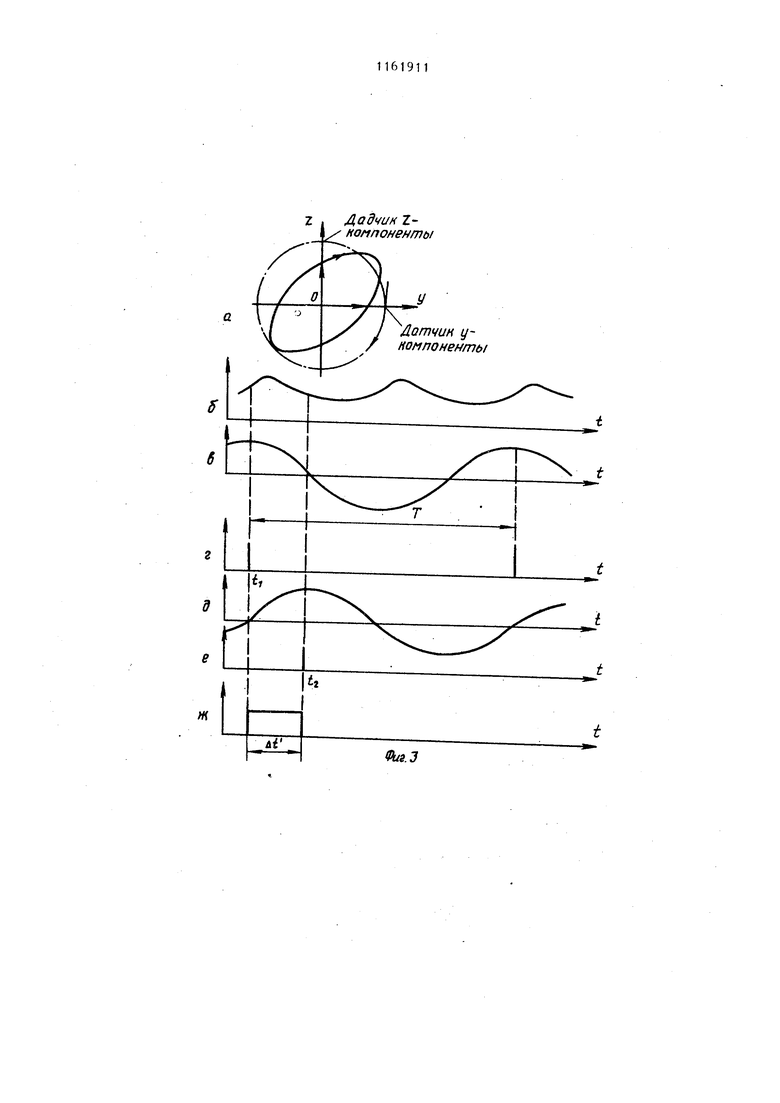
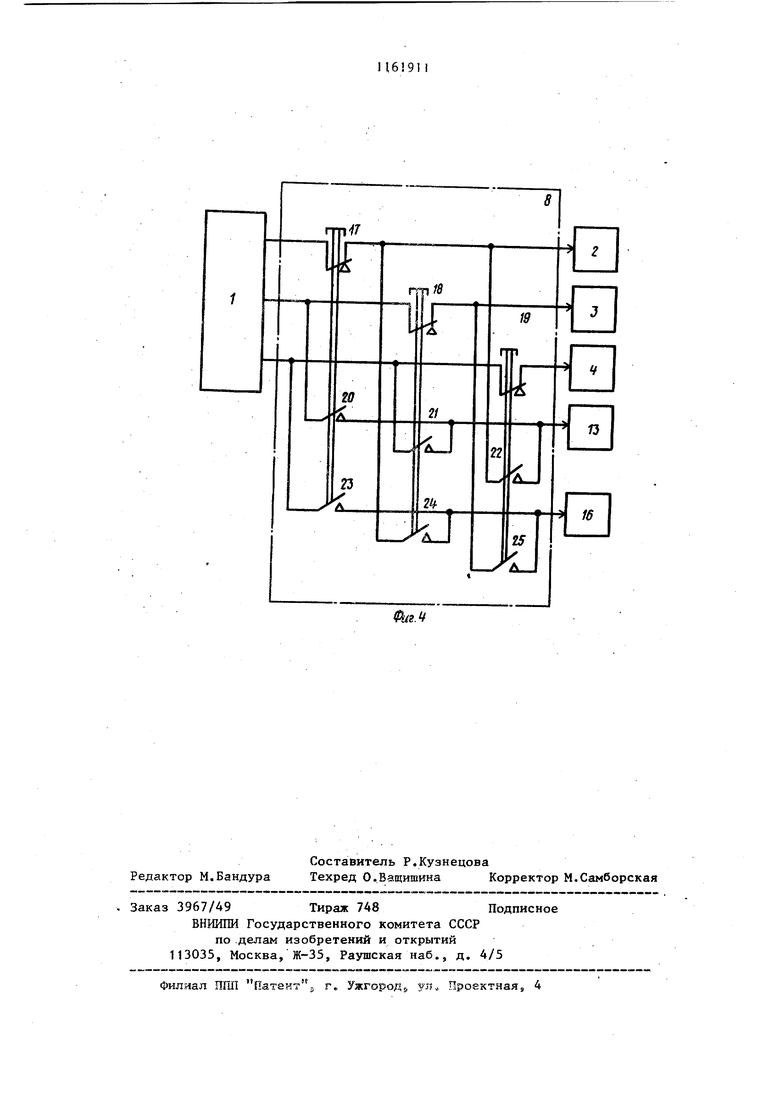
чений модуля напряженности исследуемого вращающегося электрического поля 2j . 3 Наиболее близким техническим решением к изобретению является устройство для измерение напряженности вращающегося электрического поля, содержащее трехкомпонентный датчик, три квадратораi выходы кото рых через сумматор соединены с входом блока извлечения квадратного корня, и регистратор 3J . Однако известный способ измерени напряженности вращающегося электрического поля и устройство для его осуществления не обеспечивают высокую точность измерений, так как не позволяют определить угол преобладающей поляризации и направление вращения. Цель изобретения - повышение точ ности измерений путем определения угла преобладающей поляризации и направления вращения. Поставленная цель достигается тем, что согласно способу измерения напряженности вращающегося электрического поля, включающему измерение с помощью датчиков трех взаимно ортогональных компонент напряженности , Ей, ЕТ; исследуемого вращающегося электрического поля и определение п ним максимального , и минимального Е,щ,ц значений модуля напряженности исследуемого вращающегося эле трического поля, в процессе измерений датчики ориентируют в вертикаль ной и горизойтальной плоскостях относительно Земли, фиксируют момент достижения максимального значения модуля напряженности исследуемого вращающегося электрического поля и измеряют время д до достижения нулевого значения модуля Е компоненты напряженности вращающего ся электрического поля, определяют по измеренной величине (It угол ф преобладающей поляризации по формуле (P arctrf- i -Uwui, E AOicc где U) - круговая частота исследуемого вращающегося электрического поля, затем по величинам измеренных компо нент .Е модуля напряженности исследуемого вращающегося электрического поля определяют координатную плоскость, в которой .модуль напряженности исследуемого вращающегося электрического поля поляризова 114 эллиптически или по кругу, при этом минимальное значение разности зафиксированных моментов времени соответствует правому вращению исследуемого вращающегося электрического поля,, а максимальная разность - левому вращению. В устройство для измерения напряженности вращающегося электрического поля, содержащее трехкомпонентный датчик, три квадратора, выходы которых через сумматор соединены с входом блока извлечения квадратного корня, и регистраторj введен блок программного переключения, включенный между выходами трехкомпонентного датчика и входами квадраторов, между вькодом блока извлечения квадратного корня и. первым входом регистратора включены последовательно временной селектор, первый RS -триггер, S -вход которого соединен с первым вькодом трехкомпонентного датчика через введенньпЧ пороговый блок, и первый интегратор, между выходом блока извлечения квадратного корня и вторым входом регистратора последовательно включены первый компаратор, второй вход которого соединен с четвертым выходом блока программного переключения, второй R5 -триггер и второй интегратор, при этом S -вход второго RS-триггера соединен с выходом введенного второго компаратора, первый вход которого соединен с первым входом первого компаратора, а второй - с пятым выходом блока программного переключения. Кроме того, блок программного переключения содержит первый, второй и третий нормально замкнутые ключи и первый, второй, третий, четвертый, пятый и шестой нормально разомкнутые ключи, при этом вход первого нормапьно замкнутого ключа является первым входом блока программного переключения, а его выход - первым выходом блока программного переключения и соединен с входами пятого и третьего нормально разомкнутых ключей, вход второго Нормально замкнутого ключа является BTopbw входом блока программного переключения и соединен с вхо ом первого нормально разомкнутого ключа, а его выход - вторым выхоом блока программного переключения соединен с входом шестого нормальо разомкнутого ключа, вход третьего нормально замкнутого ключа является третьим входом блока программного переключения и соединен с входами четвертого и второго нормально разомкнутых ключей, выход третьего нормально разомкнутого ключа является четвертым выходом блока програ много переключения и соединен с вых дами первого и второго нормально разомкнутых ключей, выход шестого нормально разомкнутого ключа являет ся пятым выходом блока программного переключения и соединен с выходами пятого и четвертого нормально разом кнутых ключей. На фиг.1 приведена структурная электрическая схема устройства для измерения напряженности вращающегос электрического.поляj на фиг.2 и 3 временные диаграммы, поясняющие раб ту устройства для измерения напряже ности вращающегося электрического поля на фиг.4 - структурная электр ческая схема блока программного пер ключения. Устройство для измерения напряже ности вращающегося электрического поля содержит трехкомпонентный датч 1, три квадратора 2,3 и 4, выходы которых через сумматор 5 соединены входом блока 6 извлечения квадратно корня, и регистратор 7, блок 8 программного переключения, вре-менной селектор 9, .первый R5 -триггер 10, пороговый блок 11, перзый интеграто 12, первый компаратор 13, второй R5-триггер 14 и второй интегратор 15, второй компаратор 16. Блок 8 программного переключения содержит первый, второй и третий нормально замкнутые ключи 17, 18 и 19, первый, второй, третий, четвертый, пятый и шестой нормально разом кнутые ключи 20-25. Способ измерения напряженности вращающегося электрического поля ре ализуется следующим образом. При измерениях трехкомпонентный датчик 1 ориентируют измерителем Е компоненты по вертикали и в горизонтальной плоскости, например, по магнитному полю Земли. Измерение угла преобладающей пол ризации (f производят следующим образом. Фиксируют два момента, когда модуль Е (t достигает максимума (фиг.2а) и при достижении Е -компонентой нулевого значения (фиг.26) Фиксация осуществляется путем формирования в эти моменты i, и -t импульсов (фиг.2в, г). Затем измеряют разность зафиксированных моментов ui (фиг.2д), формируя импульс, длительность которого равна ui . Измеренное значение связано с углом преобладающей поляризации у зависимостью I q; arctp i l Vcoit 1лакс Измерение направления вращения заключается в следующем. Предположим, что плоскость поляризации перпендикулярна к плоскости XQY, угол эллипса преобладающей поляризации составляет Уд . Поле вращается по часовой стрелке. Направление вращения поля в плоскости определяется со стороны положительного направления оси, перпендикулярной данной плоскости. На фиг.За показана проекция эллипса на плоскость 0 Y . Здесь же показано положение пары датчиков из трехкомпонентньпс датчиков, расположенных в этой плоскости. При измерении фиксируют два момента (i и -t ), в которые мгновенные значения модуля в этой плоскости (фиг,3б равны сигналам Е и Е ij -компонент на выходах датчика (фиг. Зв, д), и формируют в эти моменты импульсы (фиг.Зг, е). Затем измеряют разность зафиксированных моментов, формируя импульс длительностью ut (фиг.Зж). Аналогично формируется импульс длительностью ot при вращении поля в противоположном направлении. Согласно данному способу измерения при любой эллиптичности поляризации и произвольном угле (у выполняются равенства dl coihst j const;, где Т - период вращения модуля. Так как при поляризации по направлению часовой стрелки ,я при противоположной ui 7 Т , то эти направления уверенно различаются по длительности измеренных значений импульсов. Аналогично направление вращения определяется по проекции эллипса на другие координатные плоскости ТОХ и ZOY. При измерении согласно предлагаемому способу определяют координатную плоскость, в которой проекция эллипса поляризации, лежащего .в общем случае в наклонной плоскости, также является эллипсом (кругом). После этого производят измерение направления вращения согласно вышеуказанной последовательности операций, В том случае если плоскость поляризации перпендикулярна одной из координатных плоскостей, то эллипс проеКтируется на эту плоскость в линию При этом при определении направления вращения модуля в данной плоскос ти импульсы Ai и Д не формируются Из вьшаназванного следует, что достоинством предлагаемого способа измерения является возможность измерения угла преобладающей поляризации и направления вращения при различных видах поляризации, не только эллиптической или круговой, например типа деформированный эллипс. Это достоинство особенно важно, так как в реальных условиях при измерен ных напряженностях поля фактическая поляризация под влиянием различных помех может оказаться не чисто эллиптической или круговой, Трехкомпонентный датчик 1, состоящий из датчиков трех компонент ЕХ,Ей Ег предназначен для преобразования напряженности поля в электрические , пропорциональные соответствующим компонентам поля. Трехкомпонентный датчик 1 выполнен в форме сферы, на которой размещены во взаимно ортогональных координатных плоскостях три конденсаторных преобразователя. Верхней обкладкой каждого преобразователя является металлический шаровой сегмент, изолированный от корпуса сферы диэлектриком. Выходы датчика соединены с тремя входами блока 8 программного переключения, который служит для подключения по определенной программе вьЬсодов трехкомпонентного датчика 1 к входам квадраторов 2,3,4 и к входам компараторов 13, 16. Квадраторы 2,3 и 4 предназначены для возведения в квадрат мгновенных значений сигналов с выходов трехкомпонентного датчика 1. Выходы квадраторов 2,3 и 4 подключены к сумматору 5, выход которого соединен с входом блока 6. Блок 6 служит для формирования сигналов, пропорциональных мгновенному значению модуля вращающегося поля. Выход блока 6 соединен с входом временного селектора 9 и входами 2,3 компараторов 13, 16, Временной селектор 9, первый RSтриггер 10, пороговый блок 11 и первый интегратор 12 образуют блок измерения угла преобладающей поляризации. Временной селектор 9 предназначен для формирования импульса в момент достижения мгновенным значением модуля максимальной величины. Временной селектор 9 можно реализовать в виде последовательного соединения усилителя, ограничителя амплитуды, схемы дифференцирования и селектора полярности импульсов. Выход временного селектора 9 соединен с R -входом первого R5 - триггера 10, 5 -вход первого триггера 10 через пороговый блок 11 подключен к выходу Eg -компоненты трехкомпонентного датчика 1. Пороговый блок 11 служит для формирования импульсов в момент достижения Е -компонентой нулевого значения и может быть выполнен в виде двухвходовой схемы И, один из .входов которой находится под нулевым потенциалом. Выход первого R5 -триггера . 10 через первый интегратор 12 подключен к регистратору 7. Первый интегратор 12 предназначен для вьщеления из импульсной последовательности постоянной Составляющей напряженияj пропорциональной длительности импульсов. Первый и второй компараторы 13, 16, второй | 5-триггер 14 и второй интегратор 15 образуют блок измерения направления вращения поли. Блок предназначен для формирования двух уровней напряжений, соответствующих направлению вращения поля по или против часовой стрелки. Первый и второй компараторы 13, 16 предназначены для сравнения по амплитуде напряжений с выходов блока 8, формирования импульсов в момент их равенства. Выходы первого и второго компараторов 13,16 соединены cR и5 -входами второго Н5-триггера 14, соединенного через второй интегратор 15 с регистратором 7. Назначение второго и первого интегратора 15 и 12 аналогично. Устройство работает следующим образом. При размещении ориентировочного по вертикали и в горизонтальной плоскости трехкомпонентного датчика 1
во вращающемся электрическом поле, его выходные сигналы, пропорциональные трем компонентам напряженности поля, поступают на входы блока 8 программного переключения,
В исходном состоянии выходы трехкомпонентного датчика 1 подключены к входам квадраторов 2,3 и 4, При этом первый, второй, третий, четвертый, пятый и шестой нормально разомкнутые ключи 20-25 разомкнуты и предназначены для подключения выходов трехкомпонентного датчика 1 к входам первого и второго компараторов 13, 16, при их замыкании.
На выходе блока 6 формируется напряжение, пропорциональное мгновенному значению модуля в момент i (фиг.2а). В момент i( , когда напряжение на выходе блока 6 достигает максимума, на выходе временного селектора 9 формируется импульс (фиг.2в), который запускает первьш 1 6-триггер 10 по R -входу (фиг.2д). При достижении нулевого значения Е„ -компоненты (фиг.2б), йа выходе порогового блока 11 в момент i (фиг.2,г) формируется второй импульс, возвращающий первый RS -триггер 10 по б -входу в исходное состояние (фиг.2д),
Длительность сформированного импульса и напряжение на выходе первого интегратора 12 пропорциональны углу (f преобладающей поляризации. Выходное напряжение первого интегратора 12 регистрируется регистратором 7, Предположим, что для определения направления вращения поля размыкают третий нормально замкнутый ключ 19 и замыкают нормально разомкнутые ключи 22 и 25. При этом выходы EU и tg -компонент трехкомпонентного датчика 1 через нормально разомкнутые ключи 22 и ,25 подключаются к входам первого и второго компараторов 13, 16.
На выходе блока 6 формируется напряжение, пропорциональное модулю проекции эллипса поляризации на плоскость ZOY (фиг.Зб). В момент ii равенства сигнала Е -компоненты (фиг.Зв) и модуля на выходе первого
компаратора 13 формируется импульс (фиг.Зг), который запускает по R входу второй R5 -триггер 14 (фиг.Зж). В следующий момент1 2 , когда становятся равными сигналы модуля и Eii компоненты (фиг.Зд), на выходе второго компаратора 16 формируется импульс (фиг.Зе), который по 5 -входу возвращает второй R5 -триггер 14 в исходное положение. На выходе второго R5 -триггера 14 формируется импульс (фиг.Зж), по длительности которого ui определяют направление вращения поля согласно предложенному
способу. Постоянная составляющая напряжения на выходе второго интегратора 15, уровень которой характеризует направление вращения, регистрируется регистратором 7.
0 в том случае, если при нажатии кнопок трехполюсного кнопочного нажимного выключателя 19 на вход регистратора 7 не поступит уровень напряжения, соответствующий длительности импульсов ut или ui , это свидетельствует о том, что плоскость поляризации сориентирована перпендикулярно данной координатной плоскости. Б этом случае оператор нажимает
0 другую кнопку и регистрирует направление вращения поля его проекции эллипса поляризации в соответствующей координатной плоскости. С переходом в другую точку измеряемого поля ука-
3 ванная последовательность измерения повторяется.
Предложенные способ и устройство для измерения напряженности вращающегося электрического поля, позволяют повысить точность измерения по сравнению с прототипом. Этим дости- гнется возможность повышения точности дозиметрирования времени пребывания персонапа высоковольтных подстанций
5 во вращающихся полях высоких напряженностей. Практическая реализация предложенного способа позволит уточнить существующие нормативы, связывающие параметры полей и доггус0 тимое время безопасного пребывания в них, повысит информативность изучения реакции биосистем на воздействия вращающихся электрических полей.
ш
U f/ J
&оао о
Уп
exoUU1
да -J
.№li.
Zнонпоненты
Латчин y номпоненты
.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шипшовский А.А | |||
| Прикладная физическая оптика | |||
| М., Физматиздат, Л., 1961, с | |||
| Способ обмыливания жиров и жирных масел | 1911 |
|
SU500A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Расчет электрического поля трехфазной линии электропередачи | |||
| - Электричество, 1978, № 1, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
