седьмого усилителей мощности, вторые выходы которых соединены соответственно с первым и вторым входами второго блока перекрестных связей.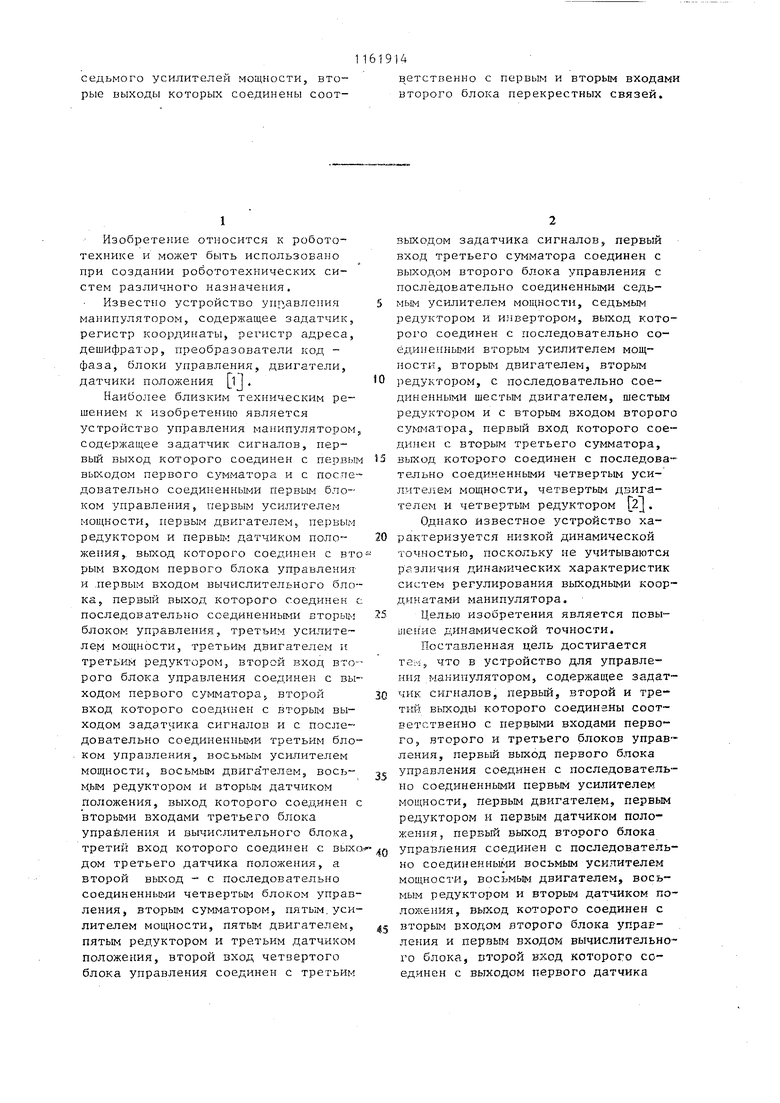
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1983 |
|
SU1166054A1 |
| Устройство для управления манипулятором | 1989 |
|
SU1668128A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1275372A1 |
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
| Устройство для управления приводом манипулятора | 1987 |
|
SU1496999A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2005 |
|
RU2309444C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2006 |
|
RU2335389C2 |
| Устройство для управления приводом манипулятора | 1989 |
|
SU1673433A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2018 |
|
RU2706079C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2002 |
|
RU2208241C1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ, содержащее задатчик сигналов, первый, второй и третий выходы которого соединены соответственно с первыми входами первого, второго и третьего блоков управления, первый выход первого блока управления соединен с последовательно соединенными первым усилителем мощности, первым двигателем, первым редуктором и первым датчиком положения, первый выход второго бло ка управления соединен с последовательно соединенными восьмым усилите лем мощности, восьмым двигателем, восьмым редуктором и вторым датчиком положения, выход которого соединен с вторым входом второго блока управления и первым входом вычислительного блока, второй вход которого соединен с выходом первого датчика положения и втopы. входом первого блока управления, третий вход с выходом третьего датчика положения, а выход - с вторым входом третьего блока управления, выход которого соединен с первыми входаьш первого и второго сумматоров, выход первого сумматора соединен с последовательно соединенными пятым усилителем мощности, пятым двигателем, пятым редуктором и третьим датчиком положения, выход второго сумматора соединен с последовательно соединенными четвертым усилителем мощности, четвертым двигателем и четвертым редуктором, входы последовательно соединенных второго усилителя мощности, второго двигателя, второго редуктора и последовательно соединенных шестого усилителя мощности, шестого двигателя, шестого редуктора соединены с вторым входом первого сумматора, входы последовательно соединенных (Л третьего усилителя мощности, третьего, двигателя, третьего редуктора и последовательно соединенных седьмого усилителя мощности, седьмого двигателя, седьмого редуктора соединены с вторым входом второго сумматора, отличающееся тем, что, с целью повышения динамической точности, устройство содержит два Эд блока перекрестных связей и блок согласования, первый и второй выходы которого соединены соответственно с вторыми входами первого и второго сумматоров, а первый и второй входыс вторыми выходами первого и второго блоков управления, выход первого блока перекрестных связей соединен с вторыми входами второго и третьего усилителей мощности, вторые выходы которых соединены соответственно с первым и вторым входами первого блока перекрестных связей, выход второго блока перекрестных связей соединен с вторыми входами шестого и
1
Изобретение относится к робототехнике и может быть использовано при создании робототехнических систем различного назначения.
Известно устройство уппавления манипулятором, содержащее задатчик, регистр координаты, регистр адреса, дешифратор, преобразователи код фаза, блоки управления, двигатели, датчики положения ll.
Наиболее близким техническим решением к изобретению является устройство управления манипулятором содержащее задатчик сигналов, первый выход которого соединен с первым выходом первого сумматора и с последовательно соединенными первым блоком управления, первь м усилителем мощности, первым двигателемj первым редуктором и первым датчиком положепия,. выход которого соединен с вто рым входом первого блока управления и .первым входом вычислительного блока, первый выход которого соединен с последовательно соединенными вторьФ блоком управления, третьим усилителем мощности, третьим двигателем и третьим редуктором, второй вход второго блока управления соединен с выходом первого cym-iaTopa, второй вход которого соединен с вторьпх выходом задатчика сигналов и с последовательно соединенными третьим блоком управления, восьмым усилителем мощности, восьмым двигателем, восьм.ым редуктором и вторым датчиком положения, выход которого соединен с вторыми входами третьего блока упрабления и вычислительного блока, третий вход которого соединен с выхо дом третьего датчика положения, а второй выход - с Последовательно соединенньми четвертым блоком управления, вторым сумматором, пятым.усилителем мощности, пятым двигателем, пятым редуктором и третьим датчиком положения, второй вход четвертого блока управления соединен с третьим
выходом задатчика сигн;1лов, первый вход третьего су1-{матора соединен с выходом второго блока управления с последовательно соединенными седьмым усилителем мощности, седьмым редуктором и инвертором, выход которого соединен с последовательно соед.ииенными вторььм усилителем мощности, вторым двигателем, вторым редуктором, с последовательно соединенными шестым двигателем, шестым редуктором и с вторым входом второго cyMT-iaTopa, первый вход которого соединен с вторым третьего сумматора, выход которого соединен с последовательно соединенными четвертым усилчтелуем мощности, четвертым двигаГо1
телем и четвертым редуктором j/J.
Однако известное устройство характеризуется низкой динамической точностью, поскольку не учитываются различия динамических характеристик систем регулирования выходными коорд.инатами манипулятора.
Целью изобретения является повышение динамической точности.
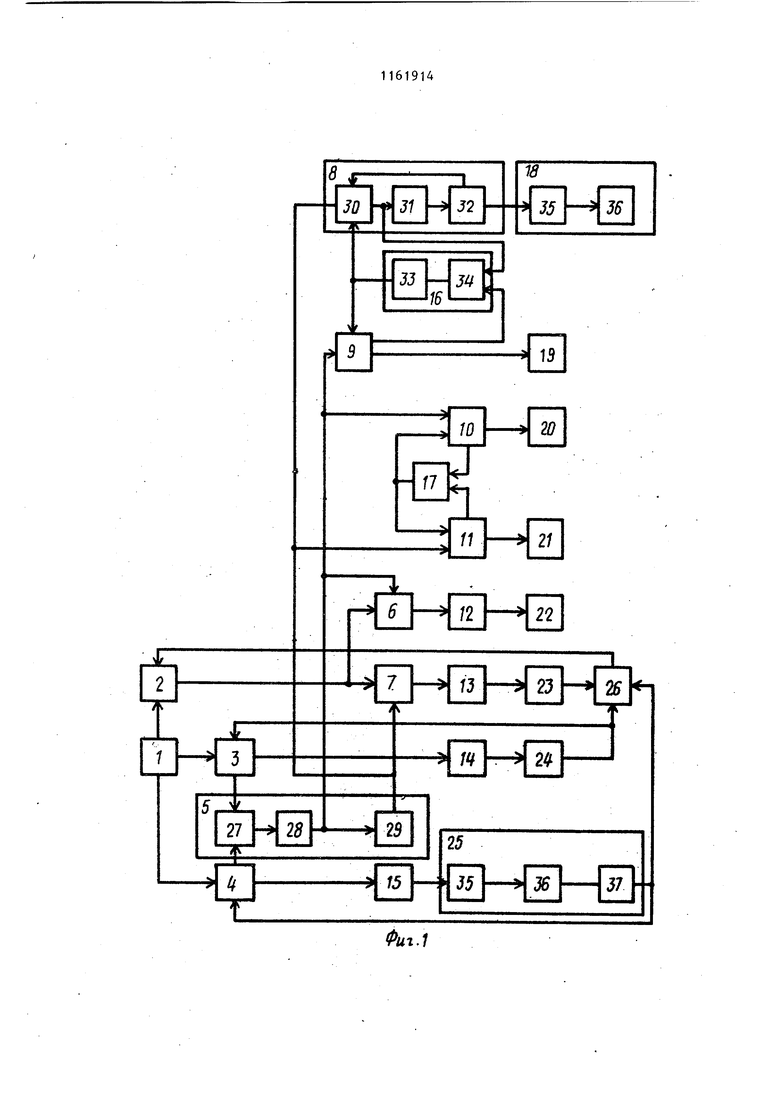
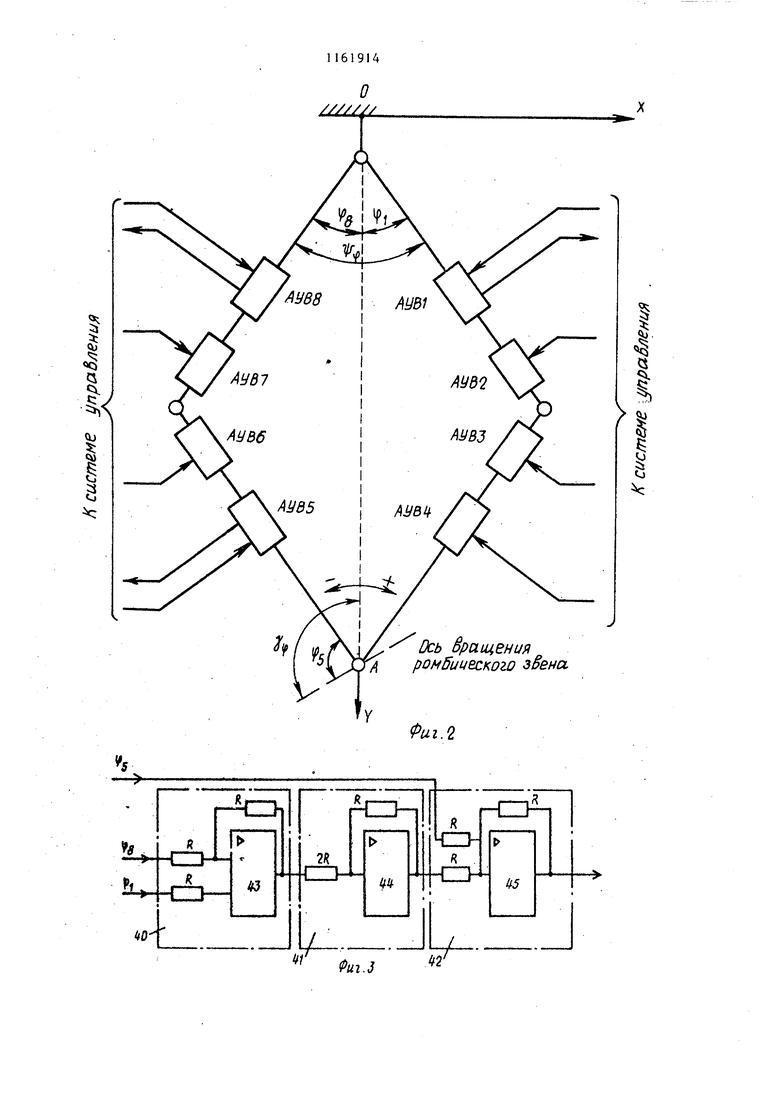
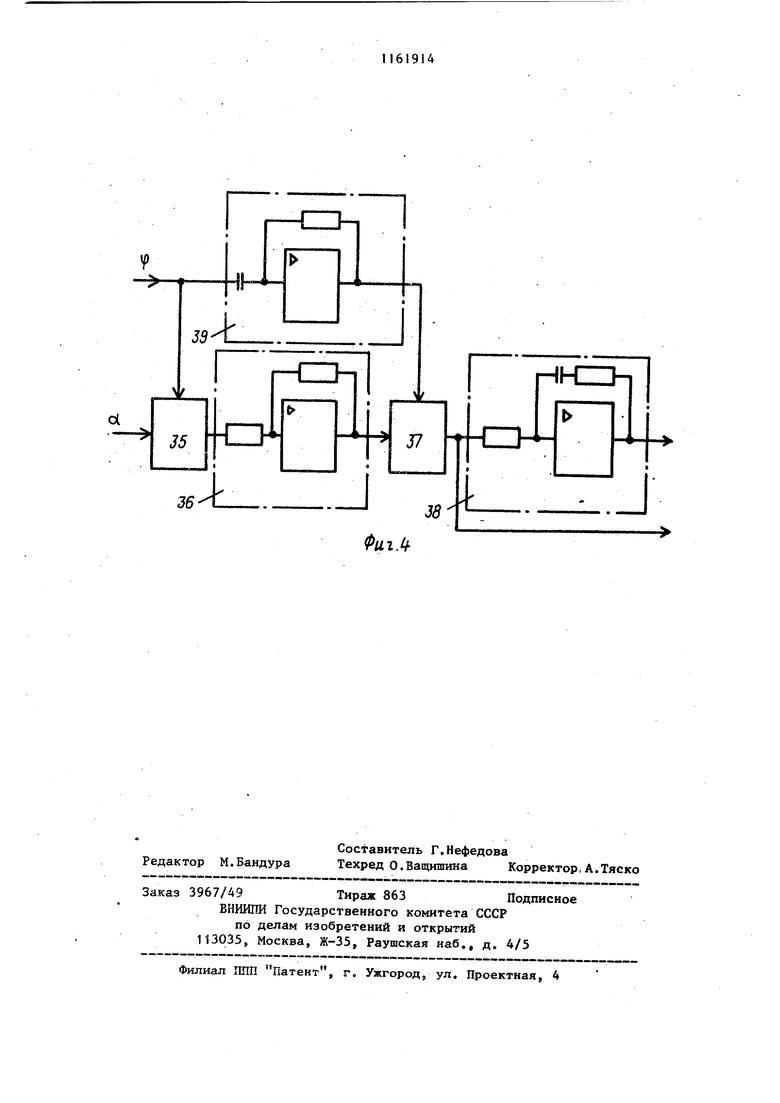
Поставленная цель достигается тем5 что в устройство для управле.ния манипулятором, содержащее задатчик сигналов, первый, второй и третий выходы которого соединены соответственно с первыми входами первого , второго и третьего блоков управления, первый выход первого блока управления соединен с последовательно соединенными первым усилителем мощности, первым двигателем, первым редуктором и первым датчиком положения, первый выход второго блока упра зления соединен с последовательно соединенными восьмым усилителем мощности, восьмым двигателем, восьмым редуктором и вторым датчиком положения, выкод которого соединен с вторым входом второго блока управления и первым входом вычислительного блока, второй вход которого соединен с выходом первого датчика положения и вторым входом первого блока управления, третий вход - с в ходом третьего датчика положения, а выход - с вторым входом третьего блока управления, выход которого соединен с первыми входами первого и второго сумматоров, выход первого сумматора соединен с Последовательн соединенными пятым усилителем мощно ти, пятым двигателем, пятым редукто ром и. третьим датчиком положения, выход второго сумматора соединен с щоследоватапьно соединенными четвер тым усилителем мощности, четвертым двигателем и четвертым редуктором, входы последовательно соединенных второго усилителя мощности, второго двигателя, второго редуктора и последовательно соединенных шестого усилителя мощности, шестого двигателя, шестого редуктора соединены с вторым входом первого сумматора, входы последовательно соединенных третьего усилителя мощности, третье го двигателя, третьего редуктора и последовательно соединенных седьмого усилителя мощности, седьмого двигателя, седьмого редуктора соединены с вторым входом второго сумматора, дополнительно введены два блока перекрестных связей и блок со гласования, первый и второй выходы которого соединены соответственно с вторыми входами первого и второго сумматоров, а первый и второй входы с вторыми выходами первого и второго блоков управления, выход первого блока перекрестных связей соединен с вторыми входами второго и третьего усилителей мощности, вторые выходы которых соединены соответственно с первым и вторым входами первого блока перекрестных связей, выход вто рого блока перекрестных связей соеди нен с вторыми входами шестого и се;дь мого усилителей мощности, вторые выходы которых соединены соответственно с первым и вторым входами второго блока перекрестных связей. На фиг.1 представлена блок-схема устройства управления мaнипyлятoppмJ на фиг.2 - расположение двигателей в ромбическом звенеJ на фиг.З - блок схема вычислительного блока; на фиг.4 - блок-схема блока управления. При этом приняты следующие обозначения: - угол при вершине ромб ческого звена мезвду осью ординат и осью правого модуля; Cfg - угол при вершине ромбического звена между осью ординат и осью левого модуля; УГОЛ раскрытия ромбического звена угол между осями левого и правого модуля; УЫ - угол поворота оси вращения выходного органа ромбического звена; ( угол при основании ромбического звена между осью вращения ромбического звена и осью левого ноДУля,о,-Ыз}У -( требуемые значения геометрических параметров ромбического звена соответственно. Система управления ромбическим манипулятором, которая, согласно fj мо;кет быть построена из нескольких ромбических звеьнев, состоит из идентичных устройств управления ромбическими звеньями. Устройство управления манипулятором содержит задатчик 1 сигналов, блоки 2, 3 и 4 управления, блок 5 согласования, сумматоры 6 и 7, усилители 8-15 МОЩНОСТИ; блоки 16 и 17 перекрестных связей, исполнительные органы 18-22, состоящие из последовательно соединенных двигателя и редуктора, исполнительные органы 23, 24 и 25, состоящие из последовательно соединенных двигателя, редукторе и датчика положения, вычислительный блок 26, сумматор 27, корректирующее звено 28, инвертор 29, сумматор 30, регулятор 31 тока, усилитель 32, корректирующее звено 33, сумматор 34, двигатель 35, редуктор 36, датчик 37 положения. Блок управления (фиг.4) содержит сумматор 38, регулятор 39 положения, сумматор 40, регулятор 41 скорости, дифференциатор 42. Вычислительный блок («г.З) содерхз1т сукматор 43, масштабный усилитель 44, сумматор 45. Устройство управления работает следукнцим образом. Так как работа ромбических звеньев, составляющих ромбический манипулятор, идентична друг другу, то работу системы управления поясним на примере работы устройства управения однозвенным ромбическим манипулятором. Углы 0, и (fft однозначно определяют положение выходного органа (точа А на фиг .2} однозвенного ромбичесого манипулятора в плоскости ХОУ. При одинаковом изменении Cj, и (fo происходит перемещение выходного органа по оси Y , если изменения ( и СС- различны, угол раскрытия(у Cp,-Cpg постоянен, происходит поворот выходного органа вокруг точки 0 Если угол раскрытия qj изменяется го происходит одновременное перемещение выходного органа по X и Y , Угол )J м определяет угол поворот оси вращения выходного органа однозвенного ромбического манипулятора, Датчик 37 положения, расположенный в исполнительном органе 23, изменяет угол Ц1 , представляющий. собой сумму двух углов, угла поворота (п и половину угла раскрытия --О- . I Величина OY определяется по фор S „ .,, ИЧ5--2 5 2 I} Вычислительньм блок 26 поз.воляет определить значение у q, по формуле{1) Заданные значения геометрических параметров звена о,) о(. „ и Jq, поступа ют на входы соответствующих блоков управления 2, 3 и 4. Система автоматического регулирования по Ср, является линейной следящей системой. В блоке 3 управления (фиг.З) на сумматоре 38 определяется сигнал ошибки системы (оС, - f,), уси ливается в регуляторе 39 положения и затем сравнивается с определяемым дифференциатором 42 сигналом скорости изменения выходного сигнала Cf на сумматоре 40. Выходной сигнал сум матопа 40 | К-(к,,)-С|, поступает на пропорционально-интегральный регулятор 41 скорости, вырабатывающий управляющее воздействие, поступающее на вход усилителя мощности. В усилителе мощности на сумматоре 30 определяется сигнал разности между входным воздействием и. сигналом, про порциональным току, протекающему через двигатель. Разностный сигнал поступает на регулятор 31 тока, выраба тывающий сигнал управления, усиливаемый усилителем 32, электродвигателем 35, расположенным в исполнительном органе. Управляющее воздействие изменяет угол С| ромбического звена, что приводит к изменению положения выход ного органа ромбического манипулятор Работа систем автоматического регулирования по if а И Ус| аналогична вышеописанной. Отличительной особенностью работы системы по У автоматического регулирования является то, что исполнительнымэлементом явля« ется сопряженная пара двигателей, расположенных в исполнительных органах 22 и 23. Усилия, изменяющие положение манипуляторов, возникают в том случае, когда моменты на выходных валах двигателей, составляю1дие сопряженную пару, направлены в разные стороны. Это условие обеспечивается за счет подачи на двигатели разнополярных управляющих напряжений (инвертор 29). Для повышения динамических характеристик необходимо, чтобы величины моментов на выходных валах двигателей сопряженной пары были равны друг другу. Реализация этого условия осуществляется за счет перекрестных связей, в котором на сумматоре 34 определяется сумма сигналов ошибки токовых контуров управления двигате- . лями, входящими в сопряженный узел вращения (выходной сигнал сумматора 30). Затем полученная сумма преобразуется в корректирующем звене 33 и по ступает на третий вход сумматора 30, выравнивая значение моментов на выходных валах двигателей. Управляющее воздействие на сопряженные пары двигателей вырабатываются блоком 5 согласования. С выхода сумматора блоков 3 и 4 управления на- вход сумматора 27 блока согласования поступают сигналы, пропорциональныео(, ) и (fо и их производным. Выходной сигнал сумматора 27 определяется как .-.l-K2q,-K,(otg-q-g),g с учетом того, чтоо, g, i fs Ц|,, выражение для примет вид (р Сигнал поступает через корректирующее звено 28 и инвертор 29 на усилители 8-13 мощности, осуществляя управляющее воздействие, обеспечивающее равенство требуемого и действительного (( угла раскрытия. Блок 5 согласования также компенсирует разли1|ие динамических характеристик систем автоматического регулирования по Cf, РЯ выработки корректирую1цих воздействий на сопряженные пары двигателей, повьшая тем самым динамическую точность всего устройства управления в целом.
13
Фиг.1
Фиг.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор с программным управлением | 1972 |
|
SU510362A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3596151/24, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
