Изобретение относится к робототехнике и может быть использовано для управления нелинейными объектами типа ромбичес кого манипулятора
Цель изобретения - повышение динамической точности управления ромбическим манипулятором за счет учета перекрестных связей и нелинейностей ромбического звена
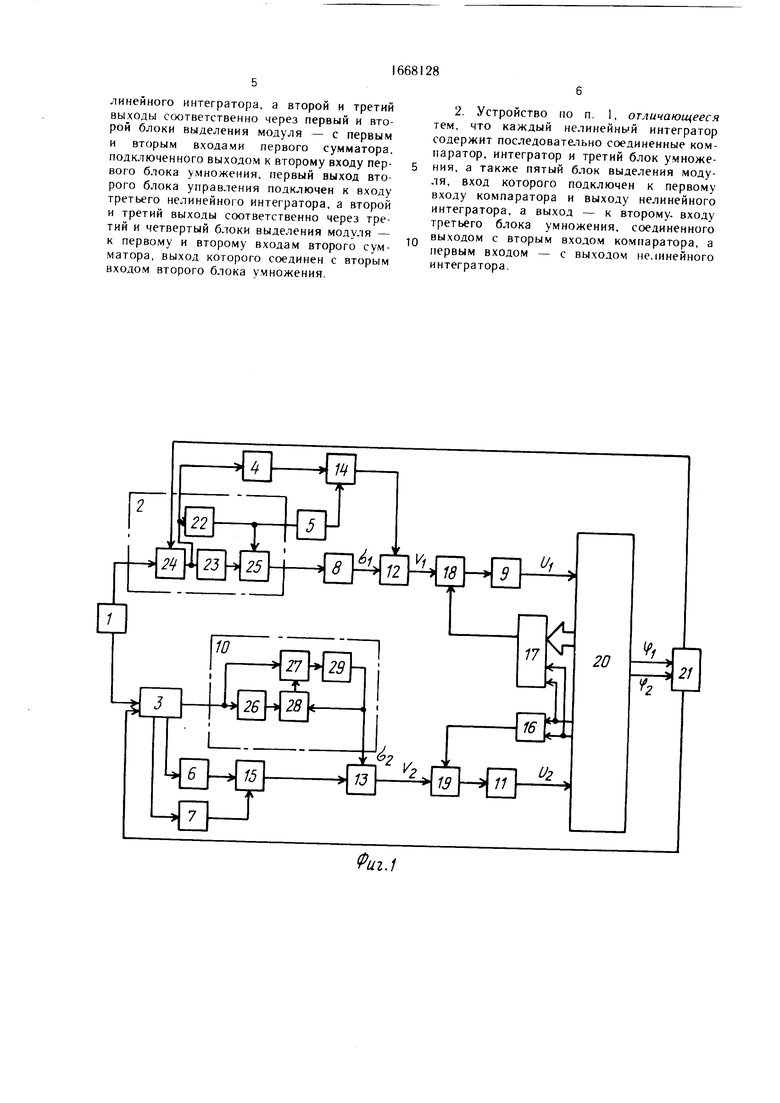
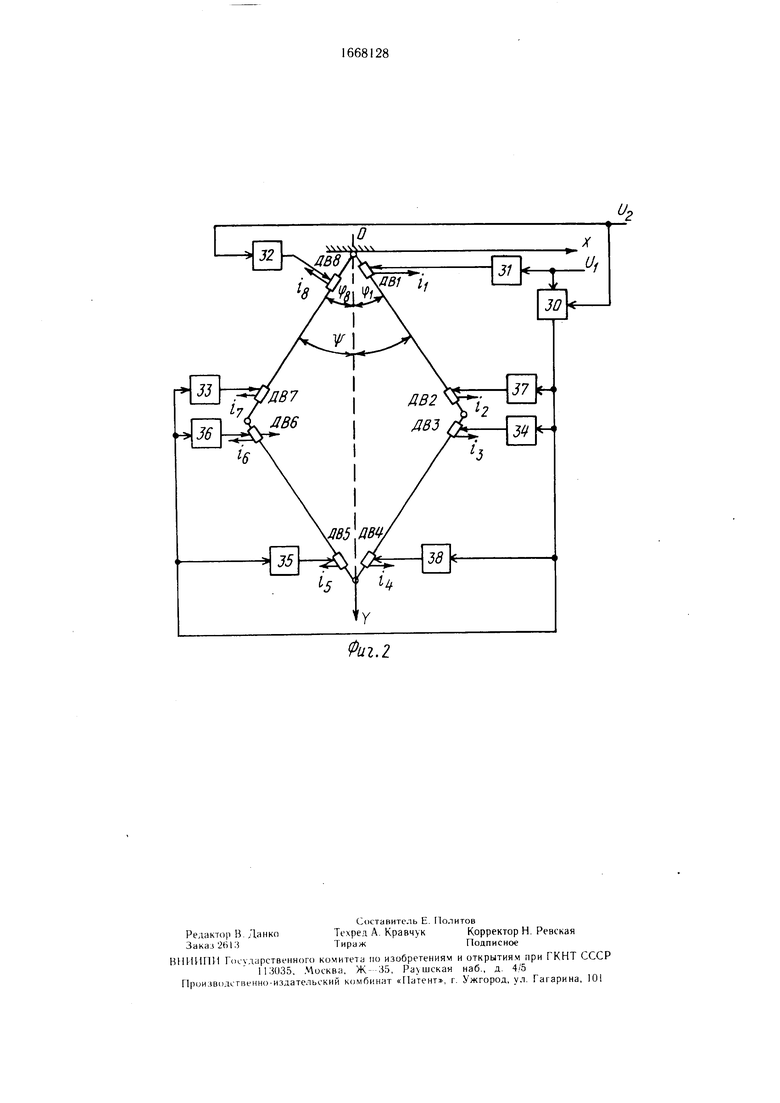
На фиг 1 представлена функциональная схема системы управления ромбическим ма нипулятором, на фиг 2 - объект управления
На фиг 1 указаны задатчик 1 сигналов, блоки 2 и 3 управления, блоки 4-7 выделения модуля, нелинейные интеграторы §-11, блоки 12 и 13 умножения, сумматоры 14-19, объект 20 управления, вычис лительный блок 21, дифференциатор 22, усилитель 23, сумматоры 24 и 25, пятый блок 26 выделения модуля, компаратор 27, третий блок 28 умножения, интегратор 29 и приняты следующие обозначения U, (Ji - управляющие напряжения, Ц|, ц - сигнал- оператор, гц, 02 - выходной сигнал нели нейного интегратора, V, V - сигнал управления внутренней координатой, ф|, р8 - выходные координаты объекта управления На фиг 2 указаны восьмой сумматор 30, неинвертирующие усилители 31 -35 мощности, инвертирующие усилители 36-38 мощности и датчики тока исполнительных двигателей, вырабатывающие сигналы (: -i. пропорциональные току, протекающему в исполнительном двигателе (не показаны), и приняты следующие обозначения ДВ1-ДВ8 - исполнительные двигатели, - сигнал, пропорциональный току двигателя, fi - угол при вершине ромбического звена между осью ординат и осью левого модуля, Фв - угол при вершине ромбического зве на между осью ординат и осью правого модуля, { - угол раскрытия ромбического звена
Устройство работает следующим образом Ромбическое звено установлено в горизонтальной плоскости, .правление производится по координатам ч и гр„, что обеспечивает перемещение в плоскости XOY схвата ромбического звена,установленного в
точке А (фиг 2)
о о оо
ю
00
Заданные значения геометрических параметров ромбического звена ф|.м и (р,ы с ныхода задатчика 1 поступают на входы со- огнетствующих блоков 2 и 3 управления.
Углы (| и (| ,ч однозначно определяют положение выходного органа (т. А, фиг. 2) однозвенного манипулятора в плоскости XOY
Вычислительный блок 21 определяет угол «раскрытия |- ромбического звена по формуле
I
и угол поворота | ромбического звена относительно точки О по формуле (х.
(шпалы, пропорциональные |г и ц. с ныхода вычислительного блока 21 поступают на вторые входы соответствующих блоков 2 и 5 управления.
В блоках 2 и Л управления определяется сигнал ошибки системы, скорость и шенения сит нала ошибки системы, а также ошибка системы по скорости, как
г...
Л .,
Г., сигнал сумматора 25; сигнал сумматора 24; сигнал дифференниатоусиления vcituneV,-, K,t выходной выходной выходной ра 22;
коэффициент ля 2:5.
Сигнал-оператор ц,(ц.) вычисляется в сумматоре 14(15), где происходит суммирование абсолютных величин сит налов ошибки и скорости ее ишенения. вычисляемой соответственно в блоках 4 (7) и о (6|, г. е
,. A , +AV A jl.
Си; нал управления внутренней координатой I ll ..) вычисляется в блоке 12 (П) умножения как
Г| Ц| П| и: Щ( IV,- IV, -о )(//,
де
на выходе
амплитуда сигнала компаратора 27.
Нелинейный интегратор 10 (8) интегрирует нак разности между входным сигналом и произведением модуля входного сигнала на выходной сигнал линейного интегратора, обеспечивая требуемую величину и скорость нарастания сигнала управления внут- ренним контуром
Введение нелинейного интегратора IUM- воляет обеспечить такое изменение сигнала управления . при котором возможно обеспечение требуемых изменений внутренних координат системы.
Нелинейный интегратор 9 (11) реализует ту же функцию, что и интеграторы 8 и 9, но величина сигнала sign выбирается не единичной, а равной с/ч , определяемой типом используемого двигателя, например 1 01 .
Стпнады управления Г: и - сравниваются, соответственно, в сумматоре 18 и 19с алгебраической суммой сигналов внутренних
0
5
0
5
0
0
5
0
J (П+ н)
и А к,
координат в соответствии с уравнениями динамики ромбического манипулятора l/,,-/(
,U|-MH),
где и V iq - напряжения на выходе соответственно сумматоров 18 и 19;
-выходной сигнал сумматора 17;
- выходной сигнал сумматора 16;
-коэффициенты пропорциональности с(ютветственно сумматоров 17 и 16.
Выходной сигнал сумматора 18 (19) после преобразования в нелинейном интеграторе 9(11) поступает на вход объекта управления. Обеспечивается такое изменение тока в исполнительных двигателях ДВ1 - ДВ8, при котором точка А ромбического звена воспроизводит заданную траекторию.
Использование алгоритмов бинарных систем управления позволяет учесть перекрестные связи ромбического звена и изменения его параметров, например электромеханической постоянной времени при изменении геометрии ромбического звена.
Формула изобретения
1. Устройство для управления манипулятором, содержащее )адатчик сигналов, первый и второй выходы которого соединены с первыми входами соответственно первого и второго блоков управления, объ- ект управления, подключенный первым и вторым выходами С(ютветс гвенно к первому и второму входам вычислительного блока, первый и второй выходы которого соединены с вторыми входами первого и второго блоков управления соответственно, а также первый и второй сумматоры, отличающееся тем, что, с целью повышения динамической точности, оно дополнительно содержит четыре блока выделения модуля, третий и четвертый сумматоры, последовательно соединенные первый нелинейный интегратор, первый блок умножения, третий сумматор и второй нелинейный интегратор, а также последовательно подключенные третий нелинейный интегратор, второй блок умножения, шестой сумматор и четвертый нелинейный интегратор, выход которого соединен с первым входом объекта управления, подключенного вторым входом к выходу второго нелинейного интегратора,третьим и четвертым выходами - соответственно к первому и второму входам третьего и четвертого сумматоров, а пятыми выходами - к третьим входам четвертого сумматора, выход которого соединен с вторым входом пятого сумматора, выход третьего сумматора подключен к второму входу шестого сумматора, первый выход первого блока управления соединен с входом первого нелинейного интегратора, а второй и третий выходы соответственно через первый и второй блоки выделения модуля - с первым и вторым входами первого сумматора, подключенного выходом к второму входу первого блока умножения, первый выход второго блока управления подключен к входу третьего нелинейного интегратора, а второй и третий выходы соответственно через третий и четвертый блоки выделения модуля - к первому и второму входам второго сумматора, выход которого соединен с вторым входом второго блока умножения.
2. Устройство по п. I, отличающееся тем, что каждый нелинейный интегратор содержит последовательно соединенные компаратор, интегратор и третий блок умножения, а также пятый блок выделения модуля, вход которого подключен к первому входу компаратора и выходу нелинейного интегратора, а выход - к второму, входу третьего блока умножения, соединенного выходом с вторым входом компаратора, а первым входом - с выходом нелинейного интегратора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
| Устройство для управления приводом робота | 1988 |
|
SU1580317A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1161914A1 |
| Устройство для управления приводом робота | 1987 |
|
SU1495116A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1166054A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1275372A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| Устройство для управления приводом робота | 1987 |
|
SU1541554A2 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ РОБОТОМ | 2003 |
|
RU2230654C1 |
Изобретение относится к робототехнике и может быть использовано для управления нелинейными объектами типа ромбического звена. Целью изобретения является повышение динамической точности управления ромбическим манипулятором за счет учета его перекрестных связей и нелинейностей. Для этого в устройство введены четыре блока выделения модуля, четыре сумматора, четыре нелинейных генератора и два блока умножения, что обеспечивает формирование нелинейных алгоритмов управления, учитывающих нелинейности ромбического манипулятора и перекрестные связи между его выходными координатами. 1 з.п.ф-лы, 2 ил.
Редактор В Данко Заказ 2Ы.5
Корректор Н Ревская Подписное
Техред А Кравчук Тираж
ВНИИПИ Пкчдарственного комитета по изобретениям и открытиям при ГКНТ СССР
113035, Москва. Ж 35, Ра шскан наб , д 45 Прии вод1. гкенно-издательский комбинат «Патент, г Ужгород, ул Гагарина, 101
Фаг.г
Составитесь Е Политое
Корректор Н Ревская Подписное
| Устройство для управления манипулятором | 1983 |
|
SU1161914A1 |
