выход которого подключен к выходу входами блока управления и шестого блока управления, вькод дифференциа- сумматора, подключенного вторым вхотора соединен с вторым входом седь- дом к соответствующему входу блока мого сумматора, а вход - с первь1ми управления.
1166054


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1983 |
|
SU1161914A1 |
| Устройство для управления манипулятором | 1989 |
|
SU1668128A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1275372A1 |
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| Устройство для управления приводом манипулятора | 1989 |
|
SU1673433A1 |
| Устройство для управления приводом манипулятора | 1987 |
|
SU1496999A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| Устройство для управления приводом робота | 1990 |
|
SU1764990A1 |
| Устройство для управления приводом робота | 1990 |
|
SU1781027A1 |

1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ, содержащее задатчик сигналов, блоки управления, восемь последовательно соединенных двигателей и редукторов, причем выход1ше валы первого, пятого и восьмого редукторов механически связаны соответственно с первым, вторым и третьим датчиками положения, а выходы первого и третьего датчиков положения соединены соответственно с первыми входами первого и четвертого блоков управления, отличающ е е с я тем, что, с целью упроще; гася устройства, оно содержит вычислительный блок, восемь усилителей мощности, три сумматора и инвертор, выходы первого, второго и третьего датчиков положения соединены с соответствующими входами вычислительного блока, первый выход которого соединен с вторым входом второго блока управления, а второй выход - с вторым входом третьего блока управления, входы двигателей соединены с выходами соответствукящлс усилителей мощности, вторые входы первого и четвертого блоков управления соединены соответственно с первым и вторым выходами задатчика сигналов, а также с первым и вторым входами третьего сумматора, а выходы - с входами первого и восьмого усилителей мощности, первые входы второго и третьего блоков управления соединены соответственно с выходом третьего сумматора и третьим выходом задатчика сигналов, выход второго блока управления соединен с входами третьего и седьмого усилителей мощности, с первым входом первого сумматора и входом инвертора, выход которого соединен с входами второго и шестого усилителей мощности и первым входом второго сумматора, второй вход которого соединен с выхосл дом третьего блока управления и вторым входом первого сумматора, выходы первого и второго сумматоров соединены соответственно с входами четвертого и пятого усилителей мощности. 2.Устройство по П.1, отличающееся тем, что вычисли- тельньй блок содержит последовательэ но соединенные четвертый сумматор, 3D масштабньй усилитель и пятый суммаэ U1 J тор, причем первый, второй и третий входы вычислительного блока подключ:ены соответственно к первому и второму входам четвертого сумматс а и i второму входу пятого сзгмматора, а t первый и второй выходы - к выходам четвертого и пятого сумматоров. 3.Устройство по П.1, отличающееся тем, что блок управления содержит дифференциатор и последовательно соединенные шестой сумматор, регулятор полсясения, седьмой сумматор и регулятор скорости.
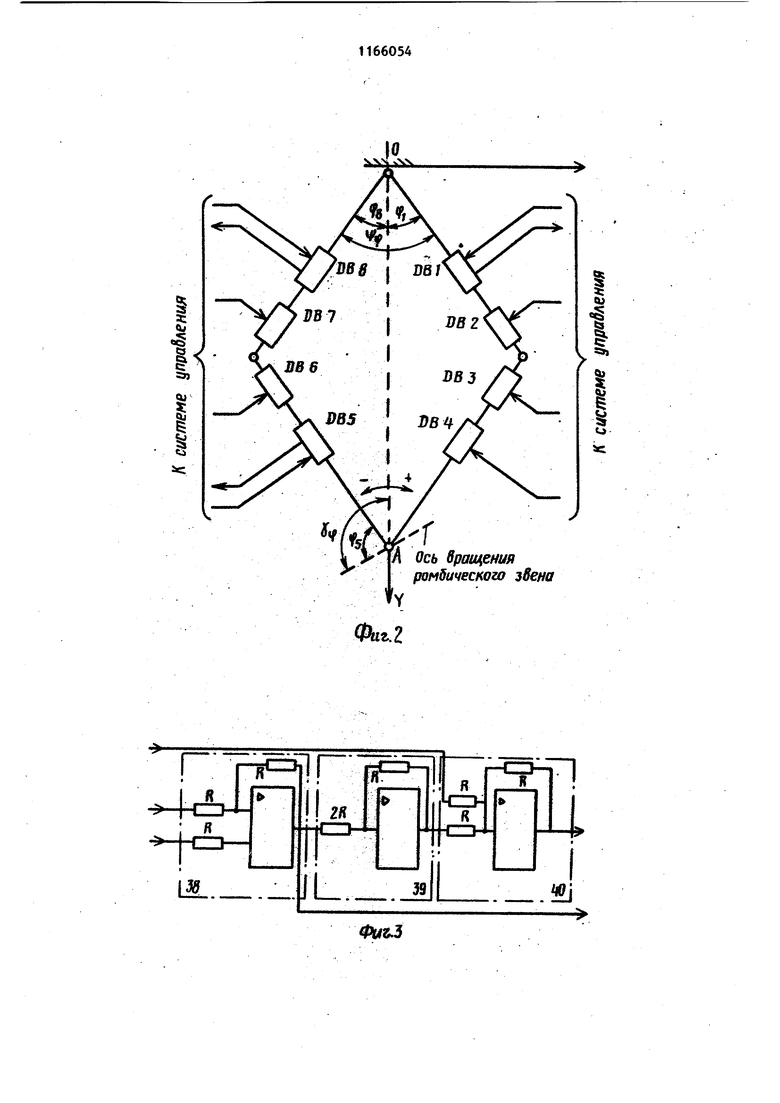
. 1 Изобретение относится к робототехнике и может быть использовано при создании робототехнических систем различного назначения на основе манипуляторов с ромбическими звенья ми. . Известно устройство для управления манипулятором, представлянщее собой следящий привод, исполнительный двигатель, датчик положения которого установлен на органе манипулирования Ci j. Однако это устройство не обеспечивает управления манипулятором с ромбообразными звеньями. Наиболее близким техническим решением к изобретению является устройство для управления манипулятором, содержащее задающее устройство соединенные с ним регистр координаты и регистр адреса, вькод которого соединен с дешифратором, выходы регистра координат соединены с входами преобразователей код - фаза, выходы которых соединены с соответствукщими последовательно соединенными узлом управления и активными узлами вращения, причем выход активного узла вращения соединен со вторым входом узла управления 21, Использование замкнутой по положению системы автоматического регулирования для управления каждым исполнительнь1м двигателем ромбическог манипулятора приводит к значительно му усложнению устройства управления манипулятором.. Целью изобретения является упрощение устройства. Поставленная цель достигается тем, что в устройство для управлени манипулятором, содержащее задатчик сигналов, четыре блока управления, восемь последовательно соединенных двигателей и редукторов, причем вы ходные валы первого, пятого и восьмого редукторов механически связаны соответственно с первым, вторым и третьим датчиками положения, а выходы первого и третьего датчиков положения соединены соответственно с первыми входами первого и четвертого блоков управления, дополнительно введены вычислительньй блок, восемь усилителей мощности, три сумматора и инвертор, выходы первого, второго и третьего датчиков положе- . тля соединены с соответствующими входами вычислительного блока, первый выход которого соединен с вторым входом второго блока управления, а второй вход - с вторым входом третьего блока управления, входы двигателей соединены с выходами соответствукнцих усилителей мощности, вторые входы первого и четвертого блоков управления соединены соответственно с пер-, вым и вторым выходами задатчика сигналов, а также с первым и вторым входами третьего сумматора, а выхо- ды - с входами первого и восьмого усилителей мощности, первые входы второго и третьего блоков управления соединены соответственно с выходом третьего сумматора и третьим выходом задатчика сигналов, выход второго блока управления соединен с входами третьего и седьмого усилителей мощности, с первым входом первого сумматора и входом инвертора, выход которого соединен с входами второго и шестого усилителей мощности и первым входом второго сумматора, второй вход которого соединен с выходом третьего блока управления и вторым входом первого сумматора, выходы первого и второго сумматора соединены соответственно с входами четвертого и пятого усилителей мощности. Вычислительный блок содержит последовательно соединенные четвертый сумматор, масштабный усилитель и пятый сумматор, причем первый, второй и третий входы вычислительного блока подключены соответственно к первому и второму входам четвертого сумматора и второму входу пятого сумматора, а первый и второй выходы - к входам четвертого и пятого сумматоров. Елок управления содержит дифферен циатор и последовательно соединенные шестой сумматор, регулятор положения седьмой сумматор и регулятор скорости, выход которого подключен к выходу блока управления, выход дифференциатора соединен с вторым входом седьмого сумматора, а вход - с пер1ВЫМИ входами блока управления и шестого сумматора, подключенного вторым входом к ооответствуницему входу блока управления. На фиг. 1 представлена блок-схема устройства управления манипулятором; на фиг. 2 - расположение исполнительных двигателей в ромбическом эвене; на фиг. 3 - блок-схема вычислительного блока; на фиг. 4 - блоксхема блока управления. При этом приняты следующие обозна чения: If - угол при вершине ромбическо- го звена между осью ординат и осью правого модуля; Vj- угол при вершине ромбического звена между осью ординат и осью левого модуля; V угол раскрытия ромбического звена - угол между осями левого и правого модуля; угол поворота оси вращения выходного органа ромбического звена; ifg- угол при основании ромбического звена между осью вращения ромбического звена и осью левого модуля; ai , eCf и Vj требуемые значения геометрических парамегров ромбическо i го звена соответственно V4; D1-D8 - исполнительные двигатели Устройство управления ромбическим манипулятором, который может быть построен из нескольких ромбических звеньев, состоит из идентичных устройств управления ромбическими звеньями.. Устройство управления однозвенным манипулятором содержит исполнительные двигатели 1-8, редукторы9-16, датчики 17-19 положения, усилители 20-27 мощности, первый сумматор 28, 54 инвертор 29, второй сумматор 30, блоки 31-34 установления. Третий сумматор 35, вычислительный блок 36 и задатчик 37 сигналов. Вычислительный блок 36 содержит четвертый сумматор 38, масштабный усилитель 39, пятый сумматор 40. Блоки 31-34 управления содержат шестой сумматор 41, регулятор 42 положения, седьмой сумматор 43, регулятор 44 скорости, дифференциатор 45. Устройство работает следующим образом. Углы У и Чв однозначно определяют положение выходного органа (т.А, фиг. 2) однозвенного манипулятора в плоскости XOY . Угол раскрытия ромбического звена 4 Vg определяется в сумматоре 33. Блок 36 определяет угол у поворо.та оси вращения выходного органа. Величина r. определяется по ФормулеГ -c/.i-v/- Заданные значения геометрических параметров ромбического звена в , oi. и V/ поступают на входы соответствующих блоков 31, 33 и 34 управления и сумматора 35. В блоке 31 управления (фиг. 3) на сумматоре 41 определяется сигнал ошибки системы ( ot - i/), который усиливается в регуляторе 42 положения и затем сравнивается с определяемым дифференциатором 45, сигналом скорости изменения выходного сигнала Ч на сзмматоре 43. Выходной сигнал сумматора 43 K( V,) , поступает на пропорционально-интегральный регулятор 44 скорости, вырабатывающий управляющее воздействие, силенное в усилителе 20 мощности, на исполнительный двигатель 1. X Управляющее воздействие изменяет гол ромбического звена, что приводит к изменению положения выходного органа ромбического манипуляора. Работа каналов по углам У. и f, налогична вышеописанной. При равенстве абсолютных значений V и i/j и одинаковом изменении задащих воздействий d к oL происходит еремещение выходного органа манипуятора вдоль оси Y. Значение требуемого угла раскрытия (5tf определяемого на сумматоре 35, поступает на вход блока 32 управления, заданные значения oL и otg поступают соответственно на вхо блоков 31 и ЗА управления. Управление по Ц происходит аналогично управлению по «f. Отличие за ключается в том, что управляющий сиг нал с выхода блока 32 управления управляет исполнительными двигателями 2-7. Для создания усилия, изменяющего геометрию ромбического звена, двигатели 2иЗ, 4и5, 6и7 должны имет противоположно направленные моменты на своих выходных валах, т.е. напряжения, поступающие на эти двигатели, должны быть разнополярными. Данное условие выполняется за сче инвертирования инвертором 29 управляющего напряжения с выхода блока 32 управления, поступающего на исполнительные двигатели 2, 5 и 6. Поворот выходного органа вокруг точки О осуществляется при изменении углов V, и 4g , но постоянном угле раскрытия . В этом случае происходит управление по V и % , обеспечивающее достижение требуемых значений 0 и fli а , управление по fу обеспечивает постоянство у. Управление углом ,kt/ поворота оси вращения выходного органа осуществляется блоком 33 управления. Значение у тре-, буемого угла поворота поступает на вход блока 33 управления. Напряжение с выхода блока 33 управления через сумматоры 28 и 30 управляет исполнительными двигателями 4 и 5, обеспечивающими поворот оси вращения вых:одного органа манипулятора. Сумматоры 28 и 30 позволяют использовать исполнительные двигатели 4 и 5 как при повороте оси вращения, так и при перемеще1ши выходного органа манипулятора за счет суммирования упра.вляющих сигналов с блоков 32 и 33 управления. Такое построение устройства управления манипулятором позволяет при сохранении функщюнальных возможностей значительно его упростить за счет сокращения количества используемых датчиков и блоков управления.
L..J
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| и др | |||
| Динамика систем управления манипуляторами | |||
| М., Энергия, 1971, | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
