Изобретение относится к области робототехники и может быть использовано при создании приводов ромбических манипуляторов.
Цель изобретения - повышение динамической точности устройства.
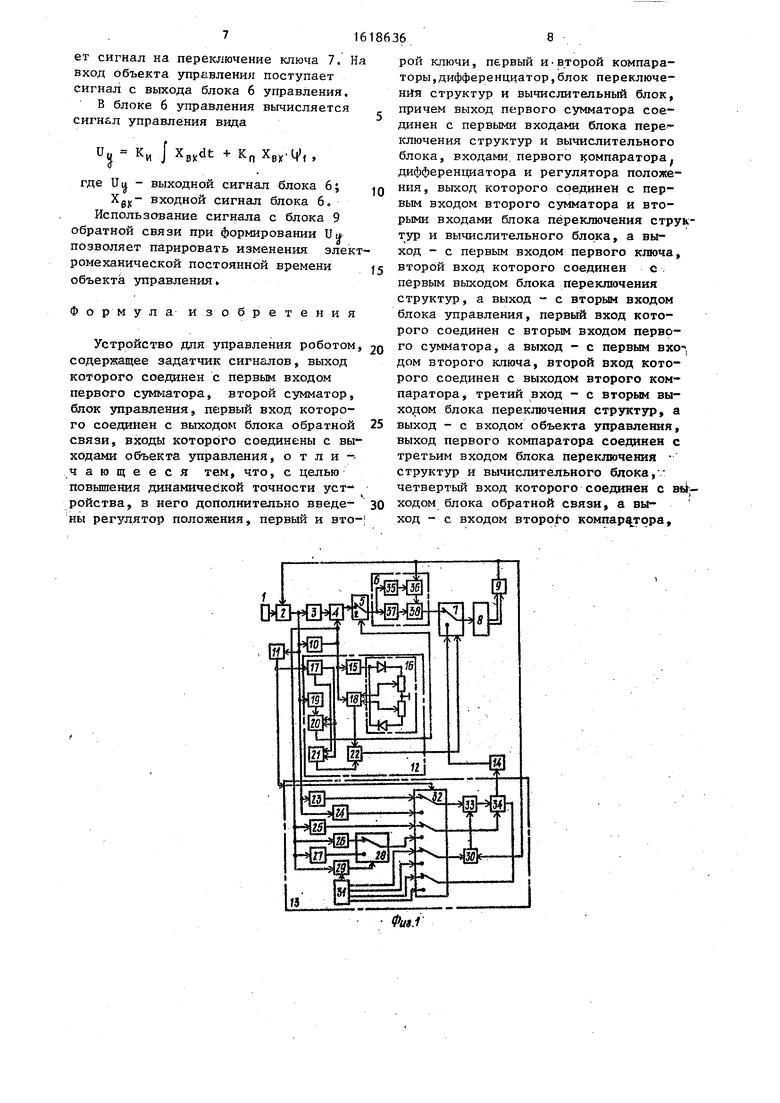
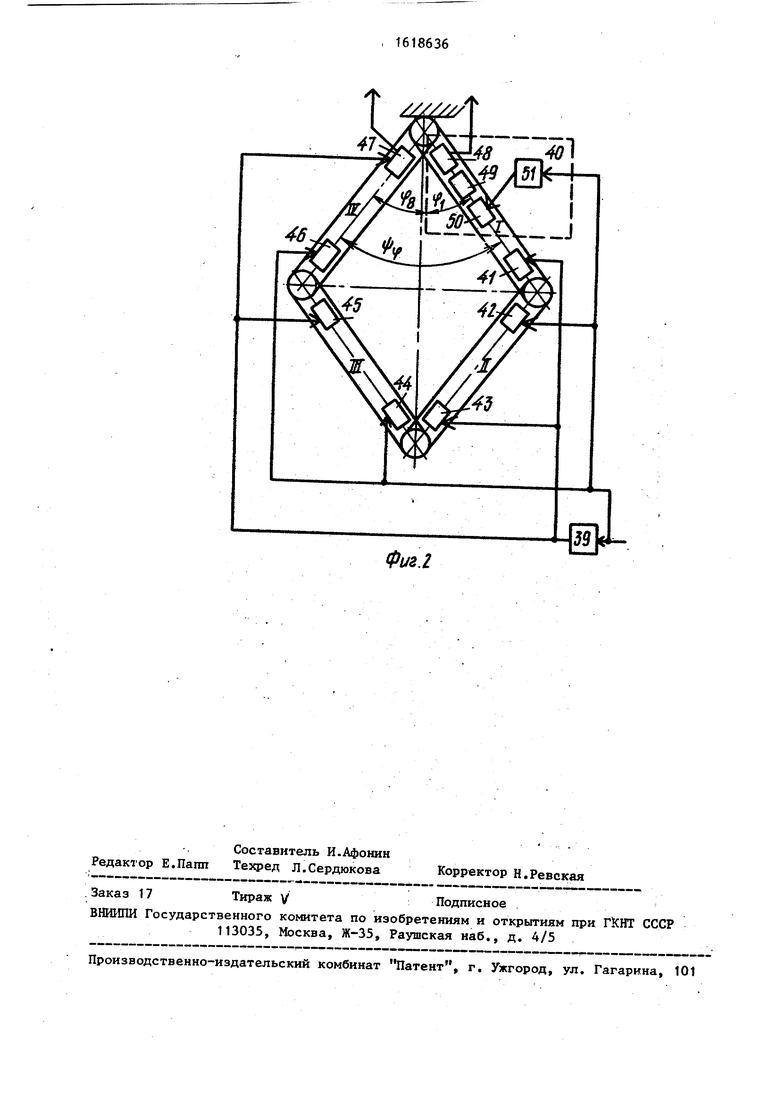
На фиг.1 представлена функциональная схема устройства; на фиг.2 - схема объекта управления.
Устройство содержит блок 1 задания программ, первый сумматор 2, регулятор 3 положения, второй сумматор 4, первый ключ 55 блок 6 управления , второй ключ 7, объект 8 управления, блок 9 обратной связи, дифференциатор 10, первый компаратор 11, блок 12 переключения структур, вычислительный блок 13, второй компаратор 14, третий компаратор 15, первый блок 16 уставок, второй блок 17 уставок, четвертый компаратор 18, первый усилитель 19, пятый компаратор 20, шестой компаратор 21, элемент И 22, второй, третий, четвертый пятый и шестой усилители 23-27. третий ключ 28, седьмой компаратор 29, третий сумматор 30, блок 31 опорных напряжений, коммутатор 32, первый блок 33 умножения, четвертый сумматор 34, седьмой усилитель 35. второй блок 36 умножения, интегратор 37 и пятый сумматор 38о
Схема на фиг,2 включает инвертор 39, исполнительные органу ромбического звена 40-47, состоящие из последовательно соединенных датчика 48 положения, редуктора 49, исполнительного двигателя 50 и усилителя 51 мощности.
Устройство работает следующим образом, х
В соответствии с программой технологического цикла, хранящейся в блоке 1 задания программы, на его выходе появляется сигнал имд, соответствующий требуемому перемещению ром бйческого звена. В сумматоре 2 вычис О00
«
СО
Ьэ
ляется сигнал рассогласования Х1, как разность между требуемым и действительным положением ромбического звена:
Х1
Паод-ф.
плоскости, на которой происходит пе- реключение управляющего сигнала, определяемого компаратором 14, выходной сигнал которого обеспечивает квазн- , оптимальное по быстродействию управление объектом 8.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1989 |
|
SU1668128A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1166054A1 |
| Устройство для управления ромбическим манипулятором | 1983 |
|
SU1315933A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1161914A1 |
| Регулятор с переменной структурой | 1983 |
|
SU1142812A1 |
| Система регулирования | 1988 |
|
SU1654777A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2396586C1 |
| Релейный регулятор | 1979 |
|
SU857929A1 |
| Система оптимального управления с моделью объектами второго порядка | 1980 |
|
SU888071A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2011 |
|
RU2465717C1 |
Изобретение относится к робототехнике и может быть использовано при создании ромбических манипуляторов. Целью изобретения является повышение динамической точности устройства. В устройство дополнительно введены блок подключения структур, вычислительный блок, регулятор положения, два ключа, два компаратора и дифференциатор, обеспечивающие компенсацию изменения электромеханической постоянной времени объекта управления. 2 ил.
Сигнал рассогласования Х1 дифференцируется в дифференциаторе 10, JQ выходной сигнал Х2 которого является скоростью изменения сигнала рассогласования,
Устройство управления построено по принципу двухэонных следящих систем, |5 согласно которому при больших значениях Х1 в устройстве реализуется квазиоптимальный по быстродействию алгоритм управления, а при малых Х1 - алгоритм адаптивного подчиненного 20 регулирования. Блок 12 переключения структур определяет условия, при которых происходит изменение алгоритмов управления, а следовательно, и структур, реализующих эти алгоритмы. 25
Вычислительный блок 13 вычисляет линию переключения L на фазовой
. Алгоритм адаптивног jрегулирования реализуе .регулятора 3 положения ключа 5 и блока 6 упра
Ромбическое звено я нейным элементом, у ко висимости от изменения тия изменяется электро постоянная времени объ ния и усилия, а следов корения, развиваемого ления.
Пусть на вход устро задания программ посту соответствующий требуе щению.
В вычислительном бл ляется линия переключе
Г ХШПг-(,М + Ktt X2 + А,, при
L Н ,,-tyf) + KF-X2 + Аг, при
X1-iO
где К„ ;- коэффициент усиления усйли-
«
ствие устройства управления при изметеля 23;нении электромеханической постоянной (-Кг) коэффициент усиления уси- « времени и усилия, развиваемого в лителя 24; объекте управления.A j и Ag, - постоянные величины; К Ј - коэффициент усиления усилителя 25,
oin Ov, постоянная величина, соответствующая предельному значению угла раскрытия : при сжатии ромбического 40 звена;
0/п 180° ,постоянная величина, соответствующая предельному j значению угла раскрытия при разжатии ромбического 45 звена.
В вычислительном блоке 13 происхон дит коррекция линии переключения в зависимости от направления движения ромбического звена. При сжатии ром- 5« бического звена, по мере увеличения угла (iff , происходит уменьшение угла наклона линии переключения (I/). При противоположном направлении движения ромбического звена (уменьшение -. tyj) происходит увеличение угла наклона линии переключения (L ).
Коррекция линии переключения поз- воляет обеспечить высокое быстродей-;
К,
Kw, при К2Э, при , В const О
|К и К2з соответственно коэффи- . циенты усиления усилителей 26 и 27.
; Значение ,,,, А, А2 и В ( устанавливаются в блоке 31 опорных напряжений.
Изменение состояния коммутатора 32 происходит по сигналу с компаратора 11, определяющего знак сигнала XI. Ключ 28 переключается по сигна- :лу с компаратора 29, выходной сигнал которого равен
U
29
1, О,
Х2 В Х2 В
. Алгоритм адаптивного подчиненного jрегулирования реализуется с помощью .регулятора 3 положения, сумматора 4, ключа 5 и блока 6 управления.
Ромбическое звено является нелинейным элементом, у которого в зависимости от изменения угла раскрытия изменяется электромеханическая постоянная времени объекта управления и усилия, а следовательно, и ускорения, развиваемого объектом управления.
Пусть на вход устройства с блока задания программ поступил сигнал, соответствующий требуемому перемещению.
В вычислительном блоке ТЗ вычисляется линия переключения:
X1-iO,
К,
Kw, при К2Э, при , В const О
|К и К2з соответственно коэффи- . циенты усиления усилителей 26 и 27.
; Значение ,,,, А, А2 и В ( устанавливаются в блоке 31 опорных напряжений.
Изменение состояния коммутатора 32 происходит по сигналу с компаратора 11, определяющего знак сигнала XI. Ключ 28 переключается по сигна- :лу с компаратора 29, выходной сигнал которого равен
1, О,
Х2 В Х2 В
51618636 Выходной сигнал вычислительного блока 13 поступает на компаратор 14, выходной сигнал которого определяется как с
и.
U,
sign L,
44 mtu где - максимальное для конкреттПОГХ
ного объекта управления значение напряжения управ- ления.
Сигнал с выхода компаратора 14 поступает на ключ 7. Последний управ ляется сигналом с выхода блока 12 переключения структур. Этот блок реализует следующие логические зависимости :
U, U,5sign X2,
где U..,. - максимальное выходное напряжение компаратора 15, т.е.
U.
+ U(5, - U,j, ,
Пй - 0„ sign XI,
где Uj,. - максимальное выходное
напряжение компаратора 11, т.е.
,
3 V
U, -
1,если
О,если
+ U,, , XI О - U,, , XI 0 ,
(Х2 Ј Ь1( , при Х2 О 2ЈЬ,2, ,
1X2 Ь,г,
при Х2 О,
при Х2 О с- при Х2 О
где О Ъ ,,.+ Utf ,-U15 b ,2 0 устанавливаются в блоке 16 уставок и в общем случае могут быть равны друг
другу.
1, если
О, если
XI Ј а ц , при XI О Х1 -а ,2 , О, XI а „ , при XI О, XI а ,2 , при Х1 0 ,
V
1,если
О,если
, при Х1 О
,ПРИ XI О,
к
XI |-L .при Х1 О i
Х1 - ,при XI 0
где К : 1 коэффищ;ент усиления усилителя 19. , ац + U 1( , , устанавливаются в блоке 17 уставок и в общем случае могут быть равны друг ДРУгу.
Uj 1 1, если
U,
1и +
О, если
1,
U3 1 U4 Ф 1
При Ug 1 ключ 7 переключается таким образом, что на вход объекта 8 управления поступает разгоняющий форсирующий сигнал с выхода компаратора 14. Выходная координата ромбического звена ф, изменяется с максимально возможным для данного объекта
8 управления ускорением, сигнал рассогласования XI уменьшается а скорость изменения Х2 увеличивается.
В момент перехода изображающей точки системы линии переключения сигнал
на входе компаратора 14 меняет свой знак и на объект 8 управления поступает тормозящий форсирующий сигнал. Объект управления начинает тормозиться. Данный алгоритм управления позваляет минимизировать динамическую ошибку управления.
При 1 происходит замыкание i ключа 5 и на блок 6 управления поступает сигнал с выхода сумматора 4,
представляющего собой алгебраическую сумму сигнала с выхода регулятора 3 положения и дифференциатора 10.
Ключ 5 устраняет накопление сигнала в интеграторе 37 при работе
устройства при больших сигналах
рассогласования. Момент включения ключа 5 определяется выбором постоянных
1-«
и а№ и коэффициента усиления усилителя 19. 55 Под действием тормозящего форсирующего сигнала сигнал продолжает уменьшаться и, когда XI станет меньше а « (а ,4 ) , i - меньше b (, (b fi ) , блок 12 переключения структур выдает сигнал на переключение ключа 7. На вход объекта управления поступает сигнал с выхода блока 6 управления. В блоке б управления вычисляется сигнал управления вида
U3 Ки J + Кп Х„
Y
(
где U(Ј - выходной сигнал блока 6;
Хвх- входной сигнал блока 6. Использование сигнала с блока 9 обратной связи при формировании U позволяет парировать изменения электромеханической постоянной времени объекта управления
Ф о р м у л а изобретени
Устройство для управления роботом, содержащее задатчнк сигналов, выход которого соединен с первым входом первого сумматора, второй сумматор, блок управления, первый вход которого соединен с выходом блока обратной связи, входы которого соединены с выходами объекта управления, отличающееся тем, что, с целью повышения динамической точности устройства, в него дополнительно введе- ны регулятор положения, первый и вто0
рой ключи, первый ивторой компараторы, дифференциатор, блок переключения структур и вычислительный блок, причем выход первого сумматора соединен с первыми входами блока переключения структур и вычислительного блока, входами, первого компаратора. дифференциатора и регулятора положения, выход которого соединен с первым входом второго сумматора и вторыми входами блока переключения структур и вычислительного блока, а выход - с первым входом первого ключа, второй вход которого соединен с , первым выходом блока переключения структур, а выход - с вторым входом блока управления, первый вход которого соединен с вторым входом первого сумматора, а выход - с первым вхол дом второго ключа, второй вход которого соединен с выходом второго компаратора, третий вход - с вторым выходом блока переключения структур, а выход - с входом объекта управления, выход первого компаратора соединен с третьим входом блока переключения структур и вычислительного блока,.: четвертый вход которого соединен с въ1- ходом блока обратной связи, а выход - с входом второго компаратора,
Фиг.I
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для управления промышленным роботом | 1985 |
|
SU1271739A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
