дещифратора, выходы дешифратора со- ; ющими входами первогь коммутатора, единены с синхровходами соответству- один из выходов дешифратора соединен ющих коммутаторов информационных ка- ,с вторым управлякнцим входом генераналов и с соответствующими управля- тора тактовых импульсов.
116t98t
| название | год | авторы | номер документа |
|---|---|---|---|
| Телеизмерительная система | 1982 |
|
SU1099322A1 |
| Устройство для разложения цифровых сигналов по Уолшо-подобным базисам | 1983 |
|
SU1108461A1 |
| Адаптивное телеизмерительное устройство | 1975 |
|
SU608186A1 |
| Адаптивный коммутатор телеизмерительной системы | 1988 |
|
SU1508260A1 |
| Телеизмерительная система | 1983 |
|
SU1130894A1 |
| Устройство для приема многоканальных сообщений с кодоимпульсной модуляцией | 1982 |
|
SU1084855A1 |
| ПРИЕМНИК ПОСЛЕДОВАТЕЛЬНЫХ МНОГОЧАСТОТНЫХ СИГНАЛОВ | 1999 |
|
RU2169993C1 |
| Передающее устройство адаптивной телеизмерительной системы | 1981 |
|
SU955164A1 |
| Устройство для автоматического управления (его варианты) | 1984 |
|
SU1249481A1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ КАЧЕСТВА РАЗМЕЩЕНИЯ В МАТРИЧНЫХ СИСТЕМАХ | 2005 |
|
RU2279709C1 |
ТЕЛЕИЗМЕРИТЕЛЬНАЯ СИСТЕМА, содержащая матричный преобразователь, входы которого являются входами , первые выходы соединены с входами первой группы каналов связи, вторую группу каналов связи, выходы которых соединены с входами сумматоров первой группы, о т л ичающаяся тем, что, с целью повьппения точности системы, в нее введены вторая группа сумматоров, первый и второй коммутаторы, первый, второй и третий счетчики импульсов, постоянно запоминающее устройство, генератор тактовых импульсов, эле мент И, дешифратор, элемент сравнения, информационные каналы, каддый из которых содержит соединенные последовательно коммутатор и интегратор, входы каналов связи второй группы соединены с соответствующими выходами первой группы матричного преобразователя, выходы каналов связи первой группы соединены с входами сумматоров второй группы, выходы сумматоров соединены с соответствуклцими информационными входами коммутаторов информационных каналов, выходы интеграторов информационных каналов-являются выходами системы и соединены с соответствующими инверсными входами сумматоров, выходы коммутаторов информационных каналов соединены с соответствующими информационными входами первого коммутатора, выход которого соединен с вым входом элемента сравнения, второй вход которого является задающим входом системы, выход элемента сравнения соединен с входами Сброс первого и второго счетчиков, с первым управляющим входом генератора тактовых импульсов и через третий счето:) чик с входами постоянного запоминающего устройства, выходы которого сосо единены с соответствующими информациэо онными входами второго коммутатора, выход которого соединен с -первым входом элемента И, выходы первого счетчика импульсов соединены с соответствующими управляющими входами второго коммутатора и коммутаторов информационных каналов, выход генератора тактовых импульсов соединен с входом первого счетчика импульсов и с BTopbiM входом элемента И, выход которого соединен с входом второго счетчика импульсов, выходы которого соединены с соответствующими входами
Изобретение относится к информащюнно-измерительной технике и может применяться в телеметрии, дальней |Связи, телеуправлении.
Известна телеизмерительная система, осуществляющая передачу сообщений по ненадежным каналам связи посредством использования параллельных каналов и состоящая из последовательно соединенных группового устройства параллельных каналов связи и другого группового устройства DJ
Недостаток данной системы - большое число каналов.
Наиболее близкой к предлагаемой является телеизмерительная система, содержащая в каждом из п измерительных каналов последовательно соединенные канал связи, сумматор, а также 1-ый матричный преобразователь, допо нительные. (т+1) каналов связи и последовательно соединенные 2-ой матричнь1й преобразователь, блок вычисления определителей и 3-ий матричйый преобразователь, выходы которого подсоединены с другим входам сумматоров, а выходы последних подключены к выходам системы. Кроме того, выходы 2-го матричного преобразователя подключены к другим входам 3-го матричного преобразователя, а входы - к выходам основных и дополнительных каналов связи, входы 1-го матричного преобразователя соединены с входом системы, а выходы - с входами дополнительных каналов связи 2J
Недостатком данной системы является низкая точность. Это обусловлено, во-первых, недостаточностью (т+1) резервшлх каналов для полного устранения сбоев в m каналах, вовторых, увеличением погрешности определения величин сбоев при росте числа ойнрвных каналов связи п, вследстви влияния нормальных погрецшрстей в каждоы канале (например, щум
квантования в цифровых системах, аппаратурная погрешность и т.д.).
Цель изобретения - повышение точности.
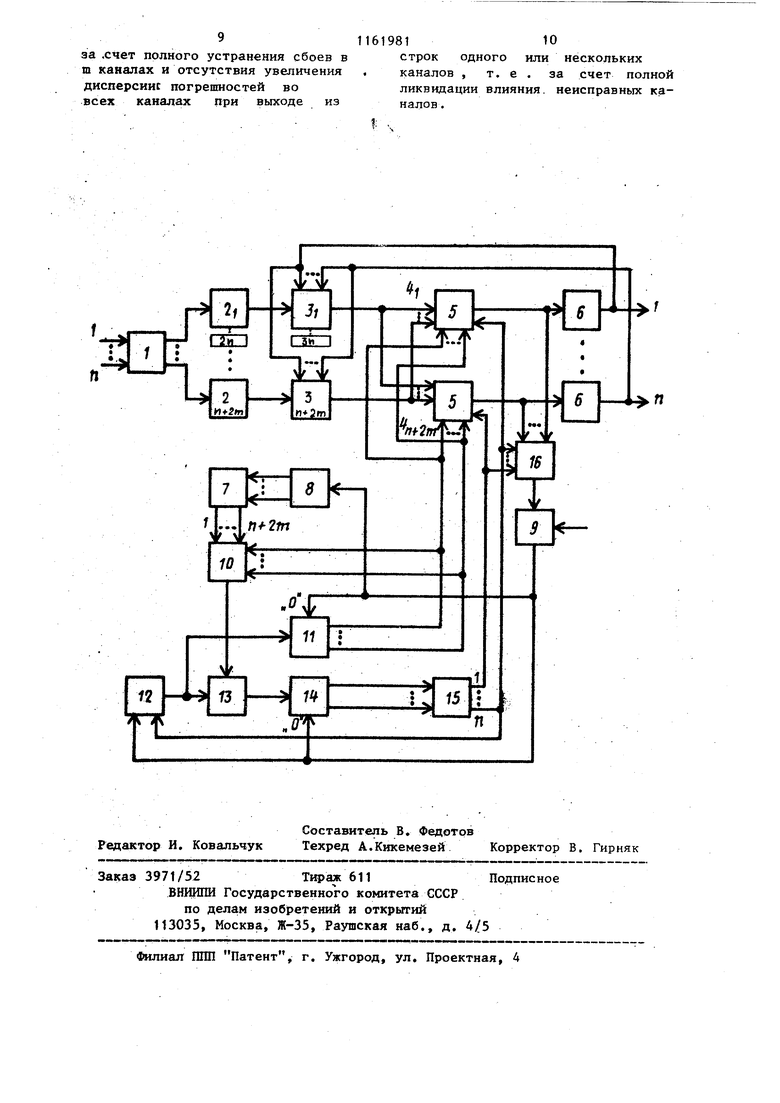
Указанная цель достигается тем, что в телеизмерительную систему, содержащую матричный преобразовател входы которого являются входами системы, первые вькоды соединены с входами первой группы каналов связи, вторую группу каналов связи, выходы которых соединены с входами сумматоров первой группы,введены вторая группа сумматоров, первый и второй коммутаторы, первый, второй и третий счетчики импульсов, постоянное запоминающее устройство, генератор тактовых импульсов, элемент И, дешифратор,. элемент сравнения., информационньш каналы, каждый из которых содержит соединенные последовательно коммутатор и интегратор, входы каналов связи второй группы соединены с соответствуницими выходами первой группы матричного преобразователя, выходы каналов связи первой группы соединены с входами сумматоров второй группы, -ВЫХОДЫ сумматоров соединены с соответствующими информационными входам коммутаторов информационных каналов Выходы интеграторов информационных каналов являются выходами системы и соединены с соответствующими инверсными входами сумматоров, выходы коммутаторов информационных каналов со.единены с соответствующими информационными входами первого коммутатора, выход которого соединен с первым входом элемента сравнения, второй вход которого является задающим входом системы, выход элемента сравнения соединен с входами Сброс первого и второго счетчиков, с первым управлякшщм входом генератора тактовых импульсов и через третий счетчик с входами постоянного запсминающего устройства выходы которого соединены с соответствующими информационными входами второго ко№4утатора, выход которого соединен с первым входом элемента И, выходы первога счетчика импульсов соедине- юл с соответствующими управляющими входами второго коммутатора и коммутаторов информационных каналов, выход генератора тактовых импульсов соедияеи с входом первого счетчика импульсов и с вторым входом элемента И, выход которого соединен с (входом второго счетчика импульсов, выходы которого соединены с соответствукшрош входами дешифратора, вы ходМ дешифратора соединены с синхровxoдa ra соответствукнцих коммутаторов информационных каналов и с соответствукнцими управляющими входами пер- вого ко|Ф утатора, один из выходов дешифратора соединен с вторым уп.равлявщим входом генератора тактовьк импульсов. Благодаря этому происходит переход к груяповому представлению пбходных сигналов (п+2т)-промежуточными сигналами (где m - максимальное число неиспра,вных каналов) , которые в приемной подсистеме преобразуюгся таким образом, что среди них выявляются п бездефектных сигналов, по которьи с помощью перестраиваемой обратной матрицы восстанавливаются телеизмерительные сигналы. На чертеже представлена структурная схема телеизмерительной системы Система содержит матричный образователь 1, (n+2m) каналов 2 связи, () сумматоров 3; информационные квналы 4, состоящие из комг мутаторов 5 и интеграторов 6, постоянное запоминающее устройство 7;тре тий счетчик 8 импульсов,- элемент 9 сравнений второй коммутатор 10, пер вый 11 импульсов генератор 12 тактовых импульсов, элемент И IS второй счетчик 14 импульсов, дешифратор 15 и первый коммутатор 16. Матри1ный преобразователь 1 преобразует п входных сигналов x(t) в (n+2in) промежуточных сигналов у (t) в соответствии с операцией умножения п-компонентного вектора на прямоугольную матрицу А размерности (n+2in).n : TCt) A.(t) Матрица А имеет следующие свойства: нормированность строк (например, нормированность по дисперсии сумма квадратов элементов равна единице), что необходимо для сохранения у выходных сигналов матричного преобразователя 1 того же динамического диапазона, что и у входных сигналов; любые п строк образуют матрицу А|, с ненулевым определителем, поэтому такая матрица имеет обратную матрицу Матрица А строится следующим образом. В качестве исходной годится квадратная (пхп) матрица с ненулевым определителем и нормированными строками, например, единичная матрица 00 ... 1 следующая (п+1)ая строка должна содержать такие элементы а.. п-и, чтобы все матрицы раз) П41, п мерности (пхп), которые можно составлять из (п+1)-ой строки и любых (п-1) предьщущих имели ненулевой определитель. Это приводит к п условиям, которые после упрощения определителей Т7 имеют вид ,,- О, i 1, п. Величины а выбираются с учетом нормированности, например: а - , i 1, п. Аналогично определяются элементы всех следуюпшх строк. Реализация матричного преобразователя 1 возможна на основе (n+2m)сум№1рующе-вычитающих . Каналы связи 2 предназначены для передачи входных сигналов на расстояние и могут быть реализованы на основе проводной линии связи, радиолинии и т.д. Сумматоры 3 имеют п+1 входов, веса которых соответствуют каждой из (п+2т) строк матрицы А таким образом, что на выходе сумматоров 3 формируется разность Ь Yj -S: , где X , i 1, п - выходныесигналы телеизмерительной системы. Блоки 3 реализуются на основе суммирующе- вычитающих схем з . 5 Коммутаторы 5 информационных каналов предназначены для передачи одного из (n+2m) входных сигналов на выход; номер подключаемого сигна ла определяется кодом на входах управления, запоминание этого кода осуществ,ляется при появлении сигнала 1 на входе управления (по переднему фронту импульса), Блоки 1 известны в виде интегральных схем. Интеграторы 6 предназначены для интегрирования входного напряжения с возможно большим быстродействием. Первый коммутатор 16 предназначен для передачи одного из п входн к сигналов на выход в соответствии с логической единицей на одном из п входов управления..Коммутатор 16 . состоит из п измерительных ключей с объединенными выходами, Постоянное запоминающее устройство 7 предназначено для запоминания,всех возможных (n+2in) разрядных кодовых комбинаций, содержащих (n+m) единиц и представляет собой блок памяти на С , n+2fti разрядных кодовых комбинаций. Каждая комбинация формируется на выходах блока 7 при появлении на его входах соответствующей адресной комбинации Счетчики импульсов 8, 11 и 14 предназначены для формирований выходной кодовой комбинации, соответс вующей числу пришедших на вход импу сов. Число возможных состояний у сч чиков 8, 11 и 14 равно С 1 , (n+2m) и п соответственно. Счетчик л И и 14, кроме того, могут сбрасыва ся в нулевое состояние под действие логической 1 на -установочном вхо Элемент 9 сравнения формирует на выходе сигнал 1, если модуль напр жения на первом входе коммутатора 16 превышает постоянное напряжение -уставки на вторсм входе, в противно случае на выходе схемы 9 имеется сигнал О, Уровень уставки, опреде ляющий минимальный уровень обнаружи ваемых с боей, т.е. точность контроля зависит от нормальных погрешност й систе№л и допустимой вероятности ложного отказа Рд каналов, сййзи 2: Л К (1 , где б среднеквадратичёское отклонение нор мальных погрешностей в .каналах связ 2, а К определяется из следующего равенства: 1 j Коммутатор 10 подключает на выход один из входных логических сигналов в соответствии с кодом на входах управления. Генератор 12 формирует на своем выходе последовательность импульсов с частотой fj или fJ в зависимости от того, на каком из двух входов управления бьш импульс 1, Частота f.() определяется быстродействием блоков 4, 6 и 9 при прохождении информационных импульсов, а частота fj определяется быстродействием блоков 4,11, 13, 14, 15 при прохождении логических сигналов. Благодаря наличию двух разных частот обеспечивается повьшенное быстродействие системы. Реализация блока 12 возможна на основе задакнцего генератора и RS-триггера, управляющего время-задающей цепью генератора либо коэффициентом деления в делителе частоты на выходе задающего генератора. Дешифратор 15 предназначен для формирования на одном из своих выходов логической единицы в соответствии с кодовой комбинацией на входах. Предлагаемая телеизмерительная работает следующим образом. Телеметрируемые сигналы x;(t), i 1, n преобразуются в блоке 1 в промежуточные сигналы у (t), j 1, с помощью матрицы А, любые п строк которой имеют обратную матрицу. Промежуточные сигналы у1(t) передаются по соответствуищим Тп+2т) каналам связи 2 р среди которых может быть не больше m неисправных каналов. Под неисправным каналом подразумевается канал 2, погрешность которого под влиянием щумов, старения, радиации, отказов злементой и т.п. превышает определенный уровень, В приемной подсистеме сигналы y(t) yj(t) (t), где j (t)- погрешность канала 2, поступают на входы соответствующих сумматоров 3, на выходах которых формируются разности f н 1 Vi -так как на дополнительные инверсные входы сумматоров 3 поданы выходные сигналы системы х (t), i 1, п. Из (n+2m) 7 выходных сигналов сумматор Зп сигна лов проходит через п коммутаторов 5 на входы п интеграторов 6., в резуль тате чего о.бразуется п-входовая и п-выходная система автоматического регулирования с матричной обратной связью,- причем строки матрицы обратной связи соответствзпот строкам матрицы А для тех п сигналов у| , номера которых выбраны для подключения в коммутаторах 5. Так как у любых п строк матрицы А имеется обратная матрица, то на выходах интеграторов 6 формируются оценки телеметрируемых сигналов x(t), что следует из равенства - 1 f - « Ч . „-An Y Х + А .. lk- V( . . где AJ, -Xматрица, составленная из п строк матрицы А, . вектор погрешностей в п КС2. Для проверки исправности выбранных (на данном такте передачи) для восстановления каналов 2 под действ ем импульсов генератора 12, следующих с пониженной скоростью fj, происходит замена части сигналов следуянцим образом. На выходе блока 7 имеется (п+2ш) логических единиц, что соответСвует (n+m) каналам 2, считающимся исправными. Если каналы 2 действительно исправны, то по любым п из них можно вос-станавливать сигналы х , причем при замене любого сигнала у , на резервный йи один нз сигналов x(t) н будет изменяться больше, чем на определенную заранее рассчитьшаемую величину, определяемую уровнем нормальных погрепшостей каналов 2, Под действием импульсов генератора 12 счетчик 11 меняет свое состояние, а на выходе коммутатора 10 появляет ся логический сигнал О шш 1 в соответствии с номером символа в кодовой комбинации на выходе постогянного запоминающего устройства 7, Как только очередная единица rjp.oftдет на выход коммутатора 10, появит ся импульс и на выходе элементов И в результате чего сче;тчик 14 измевй свое состояние и под действием импульса на выходе депшфратора 15 в соответствующий коммутатор 5 закёсется адрес резервного канала 2. Во никающий при этом переходный процес 1 затрагивает все сигналы x(t), но наибольшая амплитуда скачка будет в сигнале x(t), соответствующем коммутатору 5 с изменившимся адресом. Именно этот адрес имеется на входе коммутатора 16, поэтому амплитуда переходного процесса на выходе коммутаторов 5 и 16 в элементе 9 сравнения будет сравнена с допустимой уставкой. Если превьшгения не будет, то контроль продолжается. Если же элемент 9 сравнения сформирует на своем выходе логическую единицу, то в одном из (n+2m) каналов 2, используемых для восстановления сигналов x(t), возник отказ. Система после этого переходит в режим поиска другого набора исправных каналов 3. Для этого меняется состояние счетчика 8, на выходы постоянного запоминающего устройства 7 выводится новое (n+2m) разрядное слово с (n+m) единицами, счетчики 11 и 14 обнуляются, генератор 12 переводится на повьш1енную частоту, и во все коммутаторы 5 заносятся адреса первых п из выбранных для анализа каналов 2. Как только это закончится, п-ый вькодной импульс дешифратора 15 переведет генератор 12 на пониженную частоту и начнется режим проверки (п+т) каналов 2 на совместность. Если на одной из новых комбинаций п каналов 2 элемента 9 сравнения снова сработает, то поиск исправных (n+m) каналов 2 продолжается. Так как число отказов не превосходит т, то поиск всегда заканчивается успешно. Рассмотрим влияние нормальной составляющей погрешностей каналов на уровень обнаруживаемых погрешностей. Так как контроль основан на за- мене одного из сигналов Yj(t) надругой, то при этом происходит суммирование двух нормальных погрешностей, т.е. удвоение дисперсии нормальной погрещности. Поэтому даже для исправных каналов 2 могут.возникать скачки напряжения на входе схемы 9 сравнения, среднеквадратичное, значение этих скачков составляет величины d е N2 . Зная это, можно установить уровень, уставки на втором входе схемы 9: Л . К-42 бе гД определяется допустимой вероятностью ложных отказов. Таким образом, предлагаемое устройство обеспечивает высокую точность;
за .счет полного устранения сбоев в m каналах и отсутствия увеличения дисперсиис погрешностей во всех каналах при выходе из
...I L-i
J
ггл
и+гт
«Г
8
/
«
f2
f3
Ji
строк одного или нескольких каналов , т. е . за счет полной ликвидации влияния. неисправных ка
налов.
«f
J
Е
ч ф
16
t5
fl
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бомштейн Б.Д | |||
| и др Методы борьбы с помехами в каналах проводной связи | |||
| М., Связь, 1975, с | |||
| 227228, рис | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Об одном алгоритме числового кодирования | |||
| Труды Ленинградского института авиаприборостроения | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| и др | |||
| Применение прецизионных аналоговых интегральных схем | |||
| М., Сов.радио, 1980, с | |||
| Фальцовая черепица | 0 |
|
SU75A1 |
