«
Изобретение относится к аппаратуре для автоматического управления и может найти применение в областях науки и техники, где необходимо автоматизировать управление различными объектами и процессами, т.е. в АСУ и -АСУТП и т.д.
Цель изобретения - повьшение быст родействия и точности регулирования.
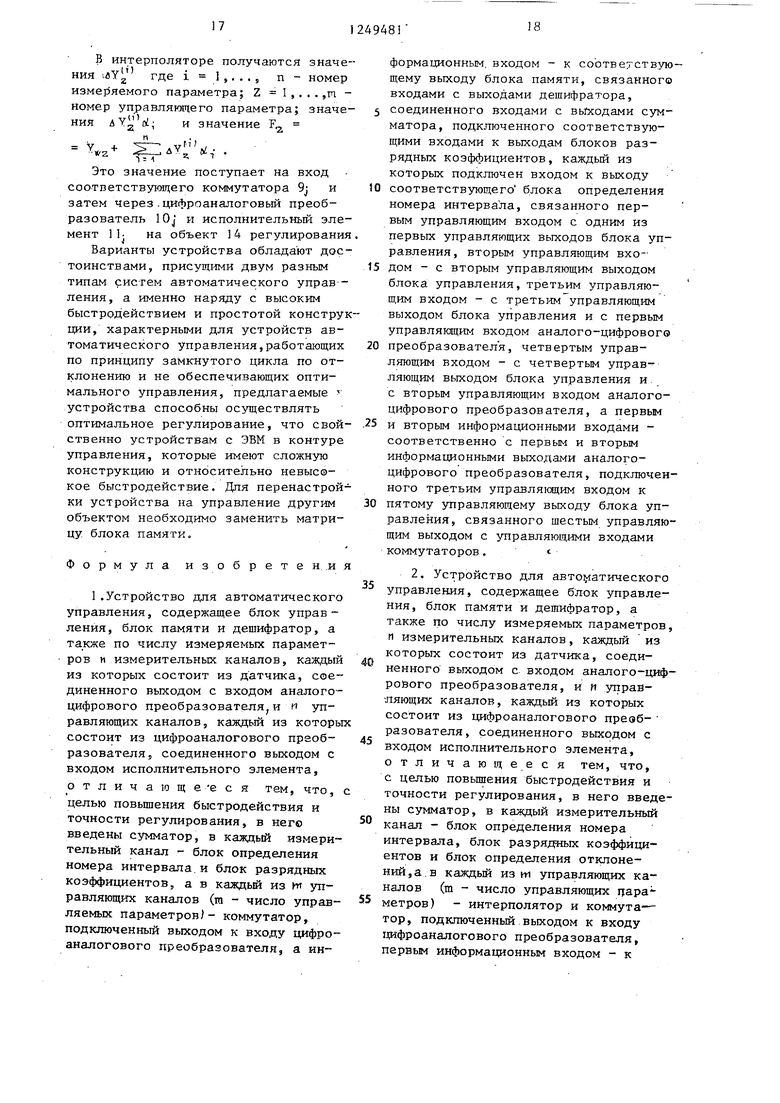
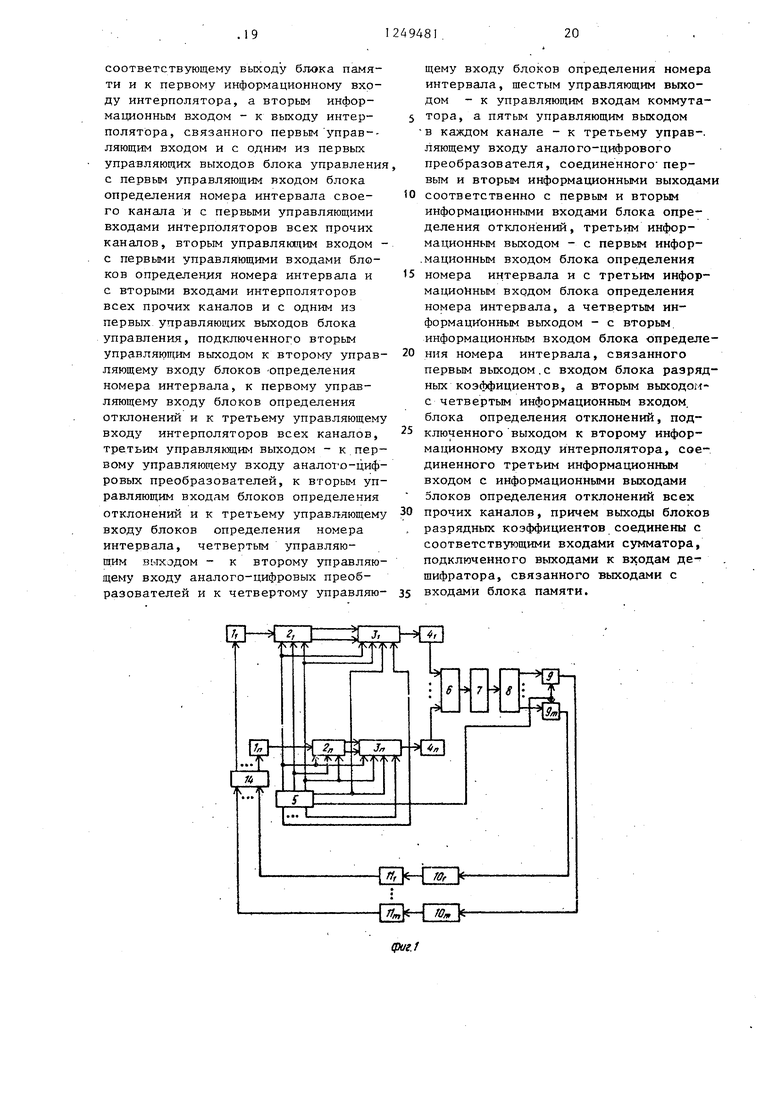
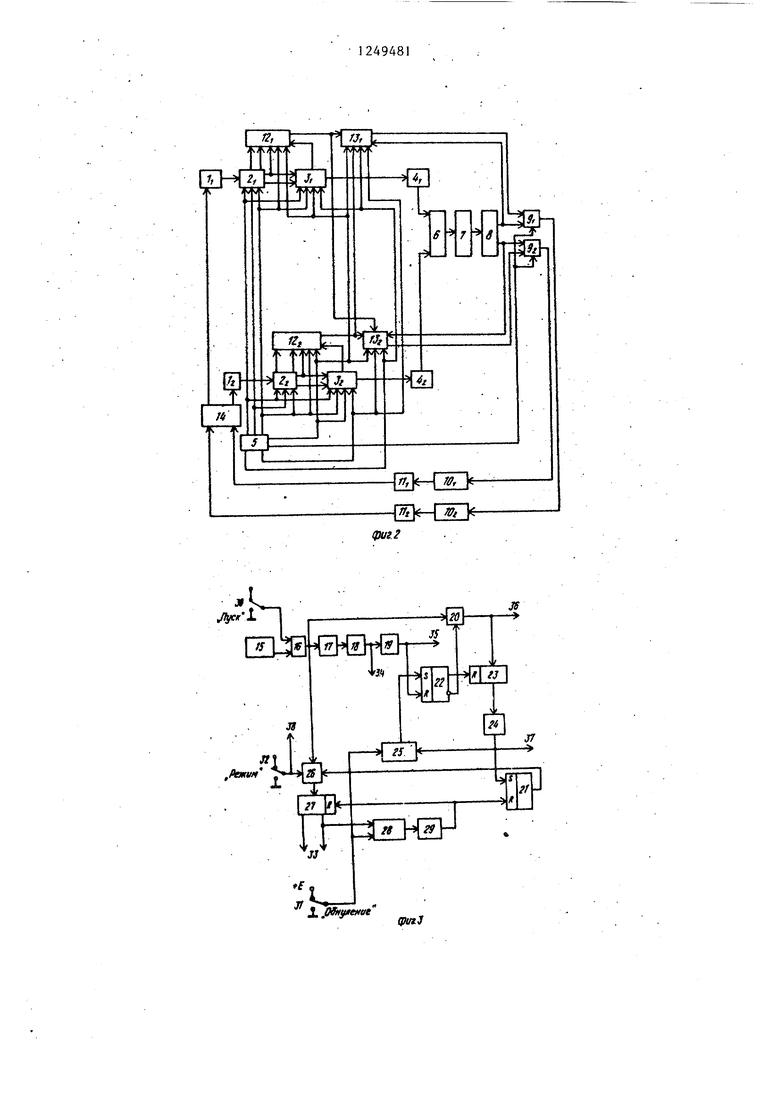
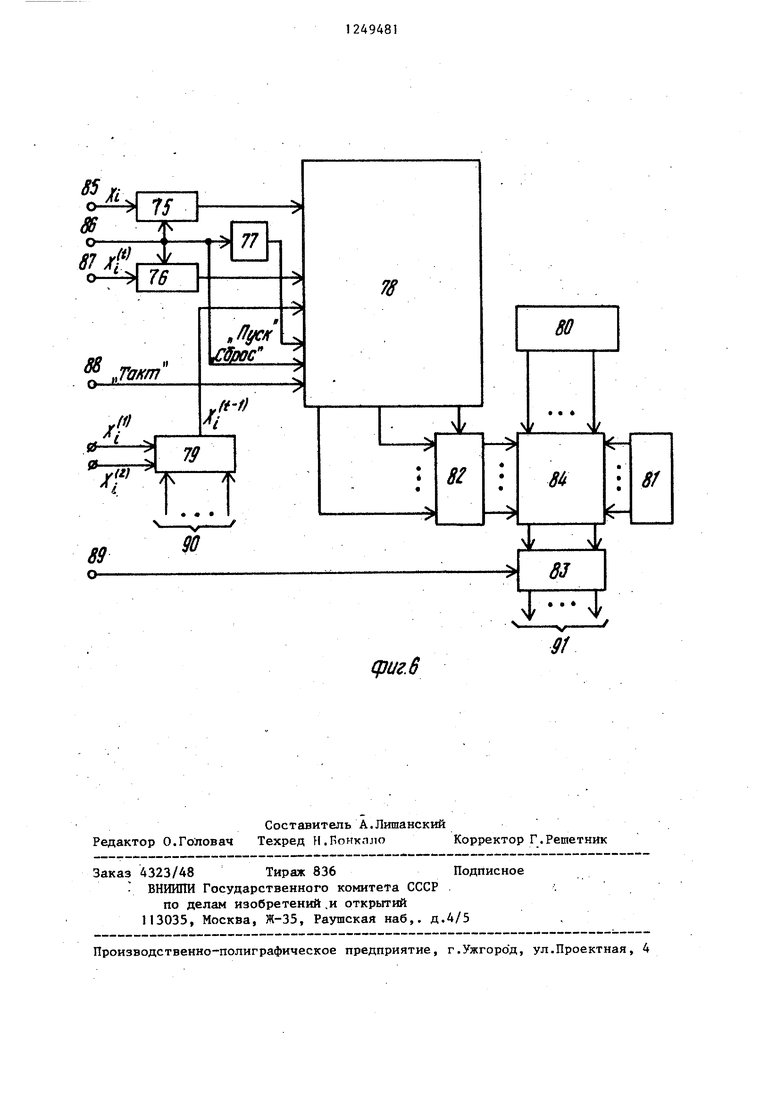
На фиг. и 2 приведены блок-схемы устройства автоматического управления соответственно для первого и второго вариантов; на фиг.З - блок- схема блока управления;- на фиг.4 - блок-схема блока определения номера интервала; на фиг,5 - блок-схема аналого-цифрового преобразователя; на фиг.6 - блок-схема блока определения отклонений.
Устройство автоматического управления (соответственно для первого и второго вариантов, фиг.1 и 2J содержит датчики 1„, аналого-цифровые преобразователи 2, блоки 3 - 3 определения номера интервала блоки 4 разрядных коэффициентов блок 5 управления , сумматор 6, дешифратор 7, блок 8 памяти, коммутаторы 9 - 9j, цифроаналоговме преобразователи 1 0, исполнительные элементы 11.- , блоки 2„ определения отклонений, линейные интерполяторы 13„. Кроме того, обозначен объект 14 регулирования.
Блок 5 управления (фиг.З) содержит тактовый генератор 15, первый элемент И 16, первый счетчик-делитель 17, первый одновибратор 18, первый элемент 19 задержки, второй элемент И 20, первьй 21 и второй 22 триггеры, второй счетчик-делитель 23, второй одновибратор 24, первый элемент ИЛИ 25, третий элемент И 26, регистр 27 сдвига, второй элемент ИЛИ 28, третий одновибратор 29, а также первый 30, второй 3 и третий 32 ключи. Блок 5 имеет выходы 33-38.
Блок 3( 3„) определения номера интервала (фиг.4) содержит узел 39 переключения каналов, состоящий из первого инвертора 40, четвертого элемента И 41, второго инвертора 42, пятого элемента И 43, и третьего элемента ИЛИ 44, третий инвертор 45, шестой элемент И 46, первьй 47, второй 48 и третий 49 регистры памяти, второй коммутатор 50, четвер49481
тый ключ 51 и второй элемент 52 задержки.
Блок 3 имеет входы 53 - 58 и , выходы 59 и 60.
5 Аналого-цифровой преобразователь 2( 2,) содержит элемент 61 выборки-хранения и первый преобразователь 62 аналог-код, состояг1ий из компаратора 63, первого преобразо10 вателя 64 код-аналог,счетчика 65 импульсов и второго дерЕифратора 66.
Преобразователь 2 имеет входы 67 - 70 и выходы 71-74.
Блок 12( 12„) определения
5 отклонений (фиг.6) содержит второй 75 и третий 76 элементы выборки- хранения, третий элемент 77 задержки, второй преобразователь 78 аналог-код, второй преобразователь
20 79 код-аналог, первый 80 и второй 81 задатчики кода, четвертый 82 и пятый 83 регистры памяти и вычислитель 84. Блок 12 имеет входы 85 - 90 и выход 91.
25 Устройство позволяет по значениям п сигналов с датчиков X, Х,..., Х определить значения m управляющих сигналов Y,Yj,...,Y, которые следует подать на исполнительные элементы для обеспечения оптимальной работы объекта регулирования.
Принцип работы устройства по первому варианту заключается в следующем.
35 Для каждой комбинации значений сигналов, поступающих с датчиков 1, „ , определяется номер строки W матрицы блока 8 памяти. В этой строке, ячейки (выходы) которой разбиты
на fv групп (регистров) , хранятся значения соответствующих управляющих сигналов Y , Y ,...,Y в цифровом коде. Эти сигналы после преобразования в аналоговую форму
45
поступают на исполнительные элементы.
Повьппение быстродействия достигается за счет применения системы кодирования, позволяющей без проведения каких-бы то ни было вычислений находить номер соответствуюв ей
строки матрицы ячеек памяти по значениям X ., Xj,. . ., X „ и за счет того, что закодированные значения оптимальных управляющих сигналов,
определенные заранее, хранятся в памяти системы, а не просчитываются каждый раз при поступлении сигналов с датчиков.
3.
Принцип кодирования, используемый в предлагаемом устройстве,заключается в следующем. Обозначим область изменения значений каждого измеряемого, параметра (т. е. сигнала с каущого i -го датчика) через
i 1,2,...,п. Область изменения каждого из Xj разбивается на Р интервалов, количество корых выбирается в зависимости от требований, предъявляемьпс к систем управления, и от объема матрицы блока 8 памяти. Каждому значению X которое возможно на выходе i-го
х ; ,хг .
датчика, ставится в соответствие определенный интервал, номер которого t;
1
удовлетворяет соотношегопо
xS -
O -i-g--- ,,., Ч ЛО
(I)
где
i
X1 X
т
i.
t 1,2,..., Р
т.е.. значение округляется с точностью, не меньшей , . Очевидно, чем больше Р; , тем вьппе точность управления, но значение Р (i
1«2п) ограничено числом строк
Т в используемой матрице памяти согласно соотношению
h ЛР,14
4 Т.
Таким образом, в зависимости от определенных значений измеряемых параметров X , и соответственно от комбинации значений t- (,2,...,п) опрашивается та или иная строка матрицы памяти. Причем зависимость между определенной комбинацией значений измеряемых параметров и номером опрашиваемой строки матрицы памяти всегда однозначна. Комбинациям, в которых значения первого параметра принадлежат первому интервалу (t. I),соответствуют строки матрицы памяти с номерами W,,, удовлетворяющими соотношению
)
1,1 W;,, Т,
1
«5 ц .
де
yfb)
).V. фЛ -°.
периодическая по X функция с периодом с, равная в интервале 0 X ic (d с) о
J.«.c
Комбинациям, в которых значения первого параметра относятся ко второму интервалу, отводятся строки W 2 матрицы памяти с номерами, удовлетворяющими соотношению
W
1,
-I:
(5)
10
Комбинациям, в которых значения 1го измеряемого параметра принадлежат к t,- -му интервалу, отводятся
строки W
ЬЬматрицы памяти с номерами, удовлетворяющими сротношению
t5
20
где
v.t, s
W,M
(tiiOiT 1 г. м
(6)
находится из. формулы
Ср ..,Р.(,.)
(7)
р Р
л S
,Р:
25
30
35
40
Таким образом, согласно соотношениям 1-7 каждому состоянию объекта управления, характеризуемому определенной комбинацией значений измеряемых параметров X , X ,...,Х, ставится в соответствие набор значений t, t,...,. В свою очередь , каждому набору t,, t ,...,t ставится в соответствие определенная строка матрицы памяти, номер которой удовлетворяет соотношению
VH..r)p«Mv,-i)...,.
VP«Pn,...P2,
где U W 4 Д Р,- Т.
Если обоз начить через Q выражение
(8)
«
Л Рр
1
(9)
то выражение виде W
(8;
можно написать 9
+ ..
t«+(t,.-l)-Q. + (t.jl)-Qp-4-«- .(t,-l) Q,,
(10)
50
или
W
- (ti-i)-Qv.
1
(11)
Каждая строка матрицы памяти состоит из т rpjrnn двоичных ячеек памяти (по числу управляемых параметров) . В Z -и группе (1 Z т) W-й строки хранится в цифровом коде значение Y величина управляющего сигнала, который следует подать
на 2 -и исполнительный элемент в случае, когда комбинации сигналов с датчиков (t,tj,..,,t) соответствует число W согласно формуле (8). Зна чения Y (, ), записанные в матрицу блока 8 памяти, определяются заранее на основе аналитического расчета или экспериментально.
Таким образом, устройство позволя ет улучшить качество процесса регулирования. При использовании устройства по второму варианту может быть дополнительно улучшена точность регулирования за счет использования метода линейной интерполяции. При этом ОЕГределяются уточненные значения (F) управляющих сигналов путем линейной интерполяции с использова- нием значений (Y ), хранящихся в нескольких строках матрицы блока 8 памяти, а также значений сигналов с датчиков 1 - „ .,
При определении значений Fg счи- таем, что при изменении значения одного из измеряемых параметров на величину, не превьшающую интервал разбиения ( i) соответствующее ему изменение Z управляющего сигнала изменяется линейно, т.е.
У + ws.
,-, (12)
45
1 1 -1
де Y,j - значение 2 -го управляюще- 35 го параметра, хранящееся в 2,-м регистре строки Ч(/ матрицы памяти с номером, вычисляемым по формуле (8);
V..U,,t,,...,(tin),,.,,tJ- 40
(по) 2 11
Y - изменение значения 2 -го о
- управляющего параметра при изменении i -го измеряемого параметра на величину интервала разбиения и при условии, что все остальные измеряемые параметры вста- ются неизменными; - номер интервала, к которому относится значение измеряемого параметра;
Sf- величина интервала разбиения значений i -го измеряемого параметра;
лХ,- - разность между действительным значением измеряемого
50
параметра X . и серединой интервала t,- , к которому это значение принадлежит, т.е.
0,5 v 4Х,- : 0,(.
(14)
Из соотношений (12) и (13) можно записать
F ,X,...,X)+|::aY V-,
(15)
где Hi- - величина относительного отклонения значения i -го измеряемого параметра от середины t, -ro интервала (-0,5 г (t, , 0,5),
равная
d.
ill
(16)
Таким образом, не увеличивая объем матрицы памяти, а оперируя значениями управляющих сигналов, хранящихся в ней, и вычисляя значения удается уточнить значения управляющих сигналов на величины, равные
п 11)
.dY tii , .Z I,2,...,m. 1- -t
Устройство no первому варианту (фиг . 1) работает следующим образом.
Приведение устройства в исходное состояние осуществляется нажатием нефиксируемого ключа 31 Обнуление. в блоке 5 управления. Пуск устройства осуществляется нажатием, фиксируемого ключа 30 Пуск блока 5 уп- . равления. При этом открывается элемент И 16 и на выходе пэявляется последовательность импульсов с ге- нератора 15, поступающая на вход счетчика-делителя 17, коэффициент деления которого V удовлетворяет соотношению
(макс)
V, п + 2-1,
(17)
где и - количество измеряемых параметров объекта управления;
(мдкс)
Р - максимальное количество интервалов, на- которые разбивается область изменения значений одного (или нескольких ) измеряемых параметров;
k - количество разрядов превб разователя аналог-код, ответственного за вьщачу значения Л; ;
- относительное отклонение величины Х от середины соответствующего интервала, к которому Х относится,
р,макс, 2- 1,
де N - количество разрядов преобразователя аналог-код, ответственного за вьщачу значений (t,- -l) и t,,
т..
V, п + 2.
Сигнал с выхода счетчика-делителя 17 через одновибратор 18 поступает на выход блока 5 управления, свя- занньш с входами Сброс-выборка всех аналого-цифровых преобразователей 2 и с входами всех блоков определения номера интервала. Параллельно сигнал с выхода одновибрато- ра 18 поступает на элемент 19 задержки,
выход которого связан с выходом
блока 5 управления, соединенным с входом Пуск всех аналого-цифровых преобразователей 2. Одновременно с этим сигнал с выхода элемента 19 задержки поступает на R -вход триггера 22, Последний открывает элемент И 20, и тактовые импульсы с его выхода поступают на вход счетчика- делителя 23, имеющего коэффициент деления, равный
V .2, (19)
и на выход блока.5 управления, связанный с входами Такт всех аналого цифровых преобразователей 2, а также с входами всех блоков 3 опредет ления номера интервала, и-после прохождения V, имупльсов, сигнал с выхода счетчика-делителя 23 через одновибратор: 24 и элемент ИЛИ 25 попадает на S -вход триггера 22, на прямом и инверсном выходах которого вырабатываются сигналы, закрьшающие элемент И 20 и обнуляющие счетчик- делитель 23. Одновременно с этим сигнал с вькода одновибратора 24 поступает на выход блока 5 управления, связанный с входами всех блоков 3 определения номера интервала. Описанная последовательность повторяет,
о
- . ся с периодом, равным V/f (гд1е V - коэффициент деления счетчика-делителя 17; f - частота генератора). 5 Перед началом работы в аналого- цифровых преобразователях 2„ на преобразователе 64 код-аналог устанавливают в качестве опорных сигналы х у и X . , т.е. минимальньш to. и максимальный уровни, в пределах которых возможно изменение сигнала, цоступающего с выхода т -го датчики. Сигнал поступает на первый вход каждого аналого-цифрового преобразовате- 15 ля 2, являющийся сигнальным входом элемента 61 выборки-хранения. При поступлении очередного импульса с выхода блока 5 управления на второй вход аналого-цифровых преобразовате20 лей 2, являющийся входом сброса и выборки, происходит следующее: аналоговый сигнал, присутствующий на соответствующем входе аналого-циф ровых преобразователей , запо25 минается н- хранится в элементе 61 выборки-хранения до поступления на другой вход аналого-цифровых преобразователей очередного импульса. Одновременно этот же сигнал посту30 пает на вход Сброс счетчика 65, что приводит к обнулению его выходов и переброске в исходное состояние компаратора 63. Одновременно сигнал с блока 5 управления через вход калсдо35 го блока 3 определения номера интервала поступает на вход Сброс регистра 45 памяти и обнуляет его выход. Сигнал на входе преобразователей 2„(вход Пуск), связанном
40 -С выходом блока 5 управления, появляется с некоторой задержкой, относительно сигнала на другом входе преобразователей 2, необходимой для срабатывания элемента 61 выбор45 ки-хранения и обнуления счетчика 65, Задержка осуществляется элементом 19 задержки. Сигнал Пуск, поступая на счетчик 65, открывает его для прохождения тактовых импульсов, пвс50 тупающих на тактовый вход преобразователей 2„ с выхода блока 5 управления. Последовательность тактовых импульсов необходима для
изменения кодов на входе преобразо- 55 вателя 64 код-аналог. Как только сигнал X , , поступающий на неин- вертирующнй вход компаратора 63, становится равным ипи большим снгнала Х-, поступающего с выхода элемента 61 выборки-хранения на инвертирующий вход компаратора 63-, последний переключается, выработав сиг- . нал Стоп,, и на выходе дешифратора 66 остается А/-разрядный код, соответствующий номеру () интервала,- которому принадлежит значение . Количество интервалов Р; , на которые разбивается значение i -го измеряемого параметра, определяется разрядностью преобразователя аналог-код
Р,. 2 1 ,UO)
где - количество разрядов счетчика 65 и преобразователя 64
код-аналог.
(21W (.11 И)
Е. .
i
I
Однако, как следует из сротноше- ния (8 ), необходимо также знать и код, соответствующий (), т.е. код номера последнего полностью перекрываемого интервала значений i-ro параметра. Этот код определяется следующим образом.
Когда компаратор находится в ис- ходном состоянии, то элемент И 46 открыт для прохождения импульсов на тактовый вход регистра 48, т.е. на выходе регистра 48 появляется с некоторой задержкой код, соответствую- щий коду на выходе дешифратора 66 (выход преобразователя 2). В момент переключения компаратора 63 (выра- бо.тка сигнала Стоп) элемент И 46 закрьтается (при этом на выходе дешифратора 66 устанавливается двоичный код ty). Вследствие этого последний задержанный импульс Такт не проходит на тактовый вход регистра 48 и на выходе регистра 48 остается прежний код, т.е. двоичный код числа (). Сигнал с выхода блока 5 управления поступает на тактовые входы регистров 47 и 48 памяти,в результате чего в них запи- сьгоается информация с выходов дешифратора 66 и регистра 48, т.е. соответственно t,- и () . Выходы регистров 47 и 49 через коммутатвр 50, управляемый узлом 39 переключени каналов, соединены с выходом блоков 3i- Зр определения номера интервала В зависимости от того, в каком канал
5
5
0
5
5 0 0 5
стоит данный блок определения «омара интервала, а также от того, в каком режиме работает устройство, на втором выходе блоков 3 определения номера интервала должен присутствовать либо код (), либо код t,- , что определяется положением ключа 51. С выхода блоков 3 - 3 , определения номера интервала информация поступает на вход блоков 4 разрядных коэффициентов, которые предназначены для получения на выходах значений, являющихся слагаемыми правой части выражения (10) . Каждое из этих значений является произведением величины, поступающей с выхода блоков 3 - 3 определения номера интервала, на величину 9, . Двоичньпй код Q; устанавливается предварительно в блоках 4 - 4„ разрядных коэффициентов. Если данный блок стоит в канале, то согласно уравнению (Ю) в него записывается код единицы. Каждый из блоков 4 разрядных коэффициентов состоит из многоразрядного задатчика кода и параллельного умножителя. Второй вход умножителя связан с задатчиком кода, на котором перед началом работы устанавливается код числа Cl; , в зависимости от канала данного из блоков 4,- 4, разрядных коэффициентов, при этом его вход связан с выходом соответствующего из блоков 3, - 3„ определения номера интервала.
Перед началом работы устройства необходимо в каждом аналого-цифровом преобразователе 2 в зависимости от номера канала, в котором он стоит, установить в качестве опорных значения X и х , ключи 51 всех блоков 3 - 3 определения номера интервала кроме ключа в и-канале, перевести в верхнее положение, в задатчике кода всех блоков 4 - 4„ разрядных коэффициентов установить в зависимости от номера канала значения Q , i l,2,...,(n-l).
В задатчике кода блока 4„ разрядных коэффициентов и -го канала устанавливается код единицы.
Совместная работа блока 5 управления, аналого-цифровьк преобразователей 2,- 2, блоков Зр определения номера интервала и блоков 4,- 4 разрядных коэффициентов аналогична была описанной выше.
Таким образом, после появления сигнала на соответствующем выхвде блока 5 управления на выходах всех блоков определения номера интервала появляются двоичные коды величины (t.-1), i ,..., (n-1) и tf, в блоке 3„ и -го кана - ла, однозначно определяемые значениями измеряемых параметров объекта регулирования в момент опроса датчиков 1 - 1„.
Сигналы с выходов блоков 3 - 3 определения номера канала поступают на входы своих блоков 4 разрядных коэффициентов, с выходов которых значения (ty-1) О,-, i 1,2,..., (n-1) и t (с выхода блока 4 н-го канала) поступают на соответствующи входы сумматора 6. Результатом суммирования является получение на выходе сумматора 6 двоичного кода числа W , однозначно зависящего от состояния объекта регулирования к моменту опроса датчиков 1 - 1 р, и одновременно являющегося, кодом номера строки матрицы блока 8 памяти, в ячейках которого записаны управляющие сигналыJ соответствующие состоянию объекта регулирования. Для возможности обращения к нужной строке матрицы блока 8 памяти необходимо преобразовать получаемьй на выходе сумматора двоичный код числа М/ в одноразрядный позиционный код. Эта операция проводится дешифратором 7 (линейный дешифратор . Причем число выходов дешифратора 7 должно равнятся числу строк матрицы блока 8 памяти, т.е. числу 1 , где - число входов дешифратора 7 или же количество разрядов, необходимых для представления в двоичном коде числа W на выходе сумматора 6. Каждый из выходов дешифратора 7 соединен со своим входом (строкой, словом) матрицы блока 8 памяти, вьтол- ненной в виде постоянного запоминающего устройстиа-. В каждой из m груп опрашиваемой строки матрицы блока памяти записан заранее рассчитанный исходя из выбранного критерия оптимальности, двоичный код. Выходы кдждой из ж групп ячеек, являющиеся одним из выходов блока 8 памяти, соединены с входом соответствующего коммутатора 9 т ().
Таким образом, в- результате преобразований с выходов коммутаторов 9 через свои цифроанапоговые пре- 5 образователи 10 и исполнительные элементы 1 1 , на органы управления . объекта 14 регулирования поступают сигналы, переводящие последний из состояния, соответствующего номеру
10 опрашиваемой строки С/ , в требуемое наперед заданное состояние. Причем этот перевод оптимальный с точки зрения управления объектом регулирования. При появлении на соответст5 вующем выходе блока 5 управления
следующего импульса, частота следования которых выбирается исходя из свойств объекта, инерционности датчиков и требований, предъявляемым к
0 системе регулирования, описанная последовательность операций повторяется. Благодаря этому происходит непрерывное управление объектом регулирования.- .
5 При использовании устройства по второму варианту (фиг.2) может быть достигнута более высокая точность регулирования. По сравнению с первым вариантом, устройство содержит в
0 каждом информационном канале блок 12- () определения отклонений (фиг.6), а в каждом управляющем канале - интерполятор ..
На вход каждого блока 12 опреде5 ления отклонений поступает текущий цифровой сигнал (t,-1),текущий аналоговый сигнал X и два постоянных ана ,л) ,, rti ,, логовых сигнала X,- и Х . На выходе
блока при этом вырабатьшается один
0 цифровой сигнал at . I
Если устройство по первому варианту осуществляет режим прямого регулирования РПР) , то устройство по второму варианту предназначено для реа лизации режима линейной интерполяции. В последнем режиме устройство осуществляет определение значений управляющих сигнало Р„ путем линейной
tt
интерполяции с использованием значе- O НИИ хранящихся в нескольких строках матрицы блока 8 памяти.
Устройство по второму варианту работает следующим образом.
В блоке 5 управления включается 5 ключ 32, в результате чего сигнал логической 1 присутствует на первом входе элемента И 26 и на соответствующем выходе блока 5 управления, связанном с управляющими входами всех коммутаторов 9j (j l-m). После появления сигнала на выходе одновибратора 24, связанном также и с S -входом триггера 21, на выходе триггера 21 вырабатьюается сигнал, открывающий элемент И 26 для прохождения импульсов с выхода элемента И 16. Импульсы с выхода элемен та И 26 поступают на h -разрядный регистр 27 сдвига, в результате чего на каждом изи его выходов, являющихся выходами блока 5 управления, появляются одиночные импульсы. Сиг- нал, появляющийся на соответствующем выходе блока 5 управления, через элемент ИЛИ 28 и одновибратвр 29 поступает на С -входы регистра 27 сдвига и триггера 21, в результате чего закрьгоается элемент И 26 и прекращается поступление импульсов на .вход регистра 27 сдвига, а сам он обнуляется. Вся последовательность повторяется с частотой f/V.
Перед началом работы в каждый блок 12. определения отклонений вводятся следующие данные; в качестве опорных, устанавливаются значения х и X , т.е. минимальное и максимальное значения i -го измеряемого параметра; в задатчиках 80 и 81 .кода набираются коды соответственно и ; . 1.2.
При вьфаботке сигнала на выходе .каждого аналого-цифрового преобразователя 2 i (сигнал Стоп с выхода компаратора 63), связанном с входом своего блока определения отклонений, являющимся входом Выборки эл.ементов 75 л 76 выборки-хранения, на их выходах появляются соответственно сигналы X,- и , поступающие на сигнальные входы элементов 75 и 76 выборки-хранения с выходов ана- лого-цифрового преобразователя 2;, при этом X , - значение сигнала с I-го датчика 1, хранящееся в элемен те 61 выборки-хранения i-го АЦП; сигнал, соответствующий верх- ней границе t -го интервала значений С выхода блока определения
номера интервала, связанного с входом блока 12{ определения отклонений, на вход преобразователя 79 пос- тупает код значения т.е. код величины, соответствукщей верхней границе (t-l)-ro интервапа i -го
измеряемого параметра. Сигнал X,- с выхода элемента 75 выборки-хранения поступает на вход преобразователя 78 аналог-код. Сиганлы X,- с выхода элемента 76 выборки-хранения и X,- с выхода преобразователя 79 поступают, в качестве опорных на соответствующие входы преобразователя 78 аналог-код. Сигнал с входа блока определения отклонений одновременно с выборкой значений Xj
( 1
и X.; осуществляется сброс преобразователя 78 аналог-код. Этот же сигнал, задержанный элементом 77 задержки, поступает на вход Пуск преобразователя 78, тем самым разрешая прохождение тактовых импульсов, поступающих на вход блока 12,- определения отклонений с соответствующего вькода блока 5 управлення и необходимьгх для осуществления преобразования аналог-код.
В результате преобразования в регистр 82 памяти записывается двоичный К-разрядный код величины , i,. X,.. - Х,., . (22)
т.е. величины, равной отклонению зна;чения Х от верхней границы (t-l),-ro интервала значений. Выход регистра 82 памяти связан с первьм входом вычислителя 84, осуществляюВ-Сщего операцию --- ,где В,С и D сигналы, поступающие соответственно на его первый, второй и третий входы На второй и третий входы вычислителя 84 поступают сигналы, установленные на задатчиках 81 и 82 кода. Таким образом
В 1,. Х,.-Х.Г ; С ,-/2; ,-, следовательно, В-С - ,72 Х,-, т.е. равно отклонению значения Х- от середины 1,- -го интервала, на выходе вычислителя, связанном с ин- формационньм входом регистра 88 памяти, получают сигнал
В-С 5
-f-.-.
(23)
т.е. величину относительного отклонения (с учетом знака значения X,- от середины t, -ro интервала значений 1-го измеряемого параметра. По сигналу, поступающему на тактовый
вход регистра 88 памяти с соответствующего выхода блока 5 управления значение li- записьгоается в регистр 83 и появляется на его , яв- ляющемся выходом блока 12 определения отклонений.
Работа каждого интерполятора 13 ; (j l-Tn) происходит следующим образом
При замыкании ключа 32 Режим в блоке 5 управления сигнал логической 1 с соответствующего выхода блока 5 управления, связанного с управляющими входами (вход Выбор . канала) всех коммутаторов 9; , обес- печивает прохождение на выход коммутаторов 9; информации, поступающей н их инфармационные входы, связанные с выходами соответствующих интерполяторов 13j .
Таким образом, коммутаторы закрыты для информации, поступающей с блока В памяти, и открыты для информаци с интерполятора 13j . При этом обеспечивается также появление сиг- налов на выходах блока 5 управления. После обнуления, замыкания ключа 30 Пуск, включая момент появления сигнала на соответствующем выходе блока 5 управления, работа устройства в режиме линейной интерполяции происходит аналогично работе устройства в режиме прямого регулирования. Однако при появлении импульса на выходе блока 5 управления, связанном с соответствующим входом каждого интерполятора 13:, сигналы с выходов блока 8 памяти не т опадают на исполнительные элементы (так как для них коммутаторы закрыты сигна- лом с соответствующего выхода блока 5 управления), а поступают в интерполятор 13-. Эти сигналы соответствуют 1,...,п. За появлением сигнала на указанном вы- ходе блока 5 управления следует появление серии одиночных импульсов : поочередно на каждом из первых выходов блока 5 управления, каждый из которых связан с входом соответст- вующего блока определения номера интервала и соответствующим входом интерполятора 13j . При появлении сигнала на этом входе блока 3 определения номера интервала сигнал на третьем входе (вход Выбор слова ) коммутатора 50 изменяется на противоположный и на выход коммутатора 50 проходит сигнал с выхода регистра 47 памяти, вместо ранее проходившего сигнала с выхода регистра 49 памяти. Таким образом, при поступлении импульса на вход любого блока 3; определения номера интервала с номером i 1 ,...-, (п-1) на его выходе вместо двоичного кода () появляется код t,, что как бы имитирует увеличение значения 1-го измеряемого параметра на величину одного интервала, т.е. вместо измеренной величины -й параметр принимает значение + fi. При появлении импульса на указанном входе блока 3„ определения номера интервала п -го канала на выходе этого блока вместо кода, соответствующего значению t, появляется код (). Это эквивалентно умень- щению значения п-го измеряемого параметра на велич:ину одного интервала, т .е. П -и измеряемый параметр вместо Xf, принимает значение Х,,. Изменение измеряемых параметров, в свою очередь, вызьшает изменение . управляющих сигналов на выходе матрицы блока 8 памяти. Новые значения управляющих сигналов, вызванные изменением значение первых (п-1) измеряемых параметров, соответствуют уменьшаемому, стоящему в правой части равенства (13) . Новые значения управляющих параметров, вызванные изменением значения и -го измеряемого параметра, соатветствуют вычитаемому, стоящему в правой части (13). .
Таким образом, в результате прохождения одиночных импульсов с первых выходов блока 5 управления в каждом из w линейных интерполяторов находятся следующие значения управляющих сигналов для (п-1)-х каналов
,(t + l , tj ,..., tj,t) ; 5 «tfl.j, t);
. t,,.-...t:n-t bt);
Z l,2,...,ni; W 1,...,T; для M-го и (n+I)-ro каналов соответственно
-г h-
YvyE.(t;,, t,..., 1„.д, t).
В интерполяторе получаются значения leYg где i 15... 5 п - номер измеряемого параметра; Z 1,...,п - номер управляющего параметра; значения
и значение Р„
Е
Т 1
Это значение поступает на вход соответствующего коммутатора 9j и затем через.цифроаналоговый преобразователь lOj и исполнительный элемент 11- на объект 14 регулирования
Варианты устройства обладают достоинствами, присущими двум разным типам систем автоматического управ-- ления, а именно наряду с высоким быстродействием и простотой конструции, характерными для устройств автоматического управления,работающих по принципу замкнутого цикла по отклонению и не обеспечивающих оптимального управления, предлагаемые устройства способны осуществлять оптимально е регулирование, что свойственно устройствам с ЭВМ в контуре управления, которые имеют сложную конструкцию и относительно невысокое быстродействие. Для перенастройки устройства на управление другим объектом необходимо заменить матрицу блока памяти.
Формула изобретен, .и
1 .Устройство для автомати-ческого управления, содержащее блок управления, блок памяти и дешифратор, а та,кже по числу измеряемых парамет- ров и измерительных каналов, каждый из которых состоит из датчика, соединенного выходом с входом аналого- цифрового преобразователя,и п управляющих каналов, каждый из которы состоит из цифроаналогового преобразователя , соединенного выходом с входом исполнительного элемента, о т л и ч а ю щ е е с я тем, что, целью повьшения быстродействия и точности регулирования, в него введены сумматор, в каждый измерительный канал - блок определения номера интервала.и блок разрядных коэффициентов, а в калодый из hi управляющих каналов (га - число управляемых параметров)- коммутатор, подключенный выходом к входу цифро- аналогового преобразователя, а информационным, входом - к соответствующему выходу блока памяти, связанного входами с выходами дешифратора, 5 соединенного входами с вьГходами сумматора, подключенного соответствующими входами к выходам блоков разрядных коэффициентов, каждый из которых подключен входом к выходу
0 соответствующего блока определения номера интервала, связанного первым управляющим входом с одним из первых управляющих выходов блока управления , вторым управляющим вхо5 дом - с вторым управляющим выходом блока управления, третьим управляющим входом - с третьим управляющим выходом блока управления и с первым управляющим входом аналого-цифрового
0 преобразователя, четвертым управляющим входом - с четвертым управляющим выходом блока управления и с вторым управляющим входом аналого- цифрового преобразователя, а первым
5 и вторым информационными входами - соответственно с первым и вторым информационными выходами аналого- цифрового преобразователя, подключенного третьим управлякщим входом к
0 пятому управляющему выходу блока управления, связанного шестым управляющим выходом с управляющими входами коммутаторов.
2. Устройство для авто атргческого управления, содержащее блок управления, блок памяти и дешифратор, а также по числу измеряемых параметров, и измерительных каналов, каждый из которых состоит из датчика, соединенного выходом с входом аналого-цифрового преобразователя, и и управляющих каналов, каждый из которых состоит из цифроаналогового преоб- разователя, соединенного выходом с входом исполнительного элемента, отличающееся тем, что, с целью повьшения быстродействия и точности регулирования, в него введены сумматор, в каждый измерительный канал - блок определения номера
интервала, блок разрядных коэффициентов и блок определения отклонений, а. в каждый из w управляющих каналов (т - число управляющих цара 5 метров) - интерполятор и коммута- тор, подключенный выходом к входу цифроаналогового преобразователя, первым информационным входом - к
5
соответствующему выходу блока памяти и к первому информационному входу интерполятора, а вторым информационным входом - к выходу интерполятора, связанного первым управ-- ляющим входом и с одним из первых управляющих выходов блока управления с первым управляющим входом блока определения номера интервала своего канала и с первыми управляющими входами интерполяторов всех прочих каналов, вторым управляюо5им входом - с первыми управляющими входами блоков определения номера интервала и с вторыми входами интерполяторов всех прочих каналов и с одним из первых управляющих выходов блока управления, подключенного вторым управляющим выходом к второму управляющему входу блоков Определения номера интервала, к первому управляющему входу блоков определения отклонений и к третьему управляющему входу интерполяторов всех каналов, третьим управлякяцим выходом - к первому управляющему входу аналого-цифровых преобразователей, к вторым управляющим входам блоков определения отклонений и к третьему управляющему входу блоков определения номера интервала, четвертым управляющим выходом - к второму управляющему входу аналого-цифровых преобразователей и к четвертому управляю-
0
5
0
5
0
щему входу блоков определения номера интервала, шестым управляющим выходом - к управляющим входам коммутатора, а пятым управляющим выходом
в каждом канале - к третьему управ-. ляющему входу аналого-цифрового преобразователя, соединенного первым и вторым информационными выходами соответственно с первым и вторым информахщонными входами блока определения отклонений, третьим информационным выходом - с первым инфор.мационным входом блока определения номера интервала и с третьим информационным входом блока определения номера интервала, а четвертым ин- формаци онным выходом - с вторым. информационным входом блока определения номера интервала, связанного первым выходом.с входом блока разрядных коэффициентов, а вторым выходом- с четвертым информационным входом. блока определения отклонений, подключенного выходом к второму информационному входу интерполятора, соединенного третьим информационным входом с информационными выходами блоков определения отклонений всех прочих каналов, причем выходы блоков разрядных коэффициентов соединены с соответствующими входами сумматора, подключенного выходами к входам дешифратора, связанного выходами с входами блока памяти.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕРПОЛЯТОР | 1991 |
|
RU2006938C1 |
| Многоканальный интерполятор функций | 1986 |
|
SU1361588A1 |
| Многоканальный преобразователь амплитуды телевизионного сигнала во временной интервал | 1983 |
|
SU1124452A1 |
| Устройство цифроаналогового преобразования | 1985 |
|
SU1361716A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ НЕЧЕТКОЙ ИНФОРМАЦИИ | 1998 |
|
RU2158441C2 |
| Запоминающее устройство для телевизионного изображения | 1985 |
|
SU1265785A1 |
| Устройство стабилизации скорости резания для токарно-винтовых станков с числовым программным управлением | 1983 |
|
SU1180845A1 |
| Способ измерения координат центра тяжести изображения и устройство для его осуществления | 1990 |
|
SU1806445A3 |
| Цифровой согласованный фильтр | 1980 |
|
SU944077A1 |
| Рентгенотелевизионный дефектоскоп | 1989 |
|
SU1599730A1 |
Изобретение .относится к аппаратуре для автоматического управления и может найти применение в областях науки и техники, где необходимо автоматизировать управление различными объектами и процессами. Цель изобретения - повышение быстродействия и точности регулирования, достигается путем использования двух вариантов устройства. Первый вариант содержит блок управления, блок памяти, дешифратор, сумматор, измерительные каналы, состоящие из датчдтеа, аналога-цифрового преобразователя, блока определения номера интервала, блока разрядных коэффициентов, а также управляющие кан.алм, состоящие из коммутатора, цифроаналогового преобразователя и исполнительного элемента. Первый вариант устройства реализует режим прямого регулирования объекта. Второй вариант содержит блок управления, блок памяти, дешифратор, сумматор, измерительные каналы, состоящие из датчика, аналого- цифрового преобразователя, блока определения номера интервала, блока разрядных коэффи1щеитов и блока определения, отклонений а также управляюпсие каналы, состоящие из Коммутатора, интерполятора, цифро- аналогового преобразователя и исполнительного элемента. Второй вариант устройства реализует режим линейной интерполяции. 2 с.п.ф-лы, 6 ил. с (Л 4i QD U 00
J. JffityKMtft
tfoty
5S
ff
| Рей У.Методы управления технологическими процессами.- М.: Мир, 1983, .с | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Лотом М.М | |||
| Основы теории автоматического управления | |||
| - М.: Наука, 1979, с.18, рис.1.5. | |||
