7
Изобретение относится к атмосферной оптике, может быть использовано при лидарном зондировании атмосферы для определения параметров атмосферы по .ослаблению световых сигналов в нижних слоях атмосферы и предназначено преимущественно для определения наклонной дальности видимости на аэродромах; при использовании двухчастотного зондирования может быть применено для определения концентрации газовых составляющих в атмосфере исследования источников загрязнений и так далее в мониторинге за состоянием окружающей среды.
Известен способ определения прозрачности атмосферы, сущность которог заключается в том, что принятые«эхосигналы лидара накапливают в течение двух различных промежутков времени, соответствующих протяженности всей трассы зондирования и ее части, равной величине элементарного разрешаемого по дальности объема атмосферы, и по отношению накопленных сигналов судят о прозрачности р J.
Недостатками этого способа являются невысокая точность и неоднозначность получаемых результатов при отсутствии дополнительной информации об оптическом состоянии атмасферы.
Наиболее близким к изобретению является способ определения прозрачности атмосферы путем посылки под углом к горизонту по трассе зондирования светового импульса, преобразования обратно рассеянных световых сигналов в сигналы электрического тока и накопления в пределах исследуемого слоя и всей трассы зондирования с последующим определением их отношения 2 J,
Недостатком известного способа является возможность появления значительных и трудно контролируемых погрешностей измерения в тех случаях когда максимальное значение накопленного сигнала не достигает насыщения, т.е. когда оптическая толщина Т атмосферы, в пределах дальности дейст ВИЯ лидара меньше тех значений, при которых наступает насьщение. Это приводит к тому, что при определении профиля прозрачности появляется фиктивное возрастание показателей ослаб ления, особенно существенное в конце зондируемой трассы. Для устранения этого требуется дополнительная информация об оптическом состоянии атмосферы на каком-либо участке зондируемой трассы.
Целью изобретения является повьшение точности способа.
Эта цель достигается тем, что при способе определения прозрачности атмосферы путем посьшки в атмосферу под углом к горизонту по трассе зондирования светового импульса, преобразования; обратно рассеянных световых сигналов, скорректированных на квадрат расстояния, в сигналы электрического тока и накопления в пределах исследуемого слоя и всей трассы зондирования с последующим определением их отношения, посылают дополнительньш световой импульс под другим углом к горизонту, преобразуют И накапливают обратно рассеянные сигналы аналогично преобразованию и накоплению обратно рассеянных сигналов основного светового импульса, при этом время от момента посьшки дополнительного импульса до начала накопления и- промежутки времени накопления устанавливают пропорциональными соответствующим промежуткам времени при посылке основного светового импульса с коэффициентом пропорциональности, равньм отношению синусов углов посылки основного и дополнительного импульсов, и по двум отношениям накопленных сигналов судят об искомом параметре.
На чертеже показана схема зондирования.
На схеме линия 1 соответствует поверхности Земли, линии 2 и 3 соответствуют нижней и верхней границам горизонтального слоя ЛН, в пределах которого прозводится накопление сигналов: о - точка, в которой установлен источник световых импульсоб (лидар); Ч - угол, под которым посылают основной световой импульс; Ч- угол под которым посылают дополнительный световой импульс; i. горизонтальньй слой, прозрачность которого под заданным углом Ч определяется; лЪ , горизонтальные слои атмосферы, составляющие часть исследуемого слоя с ,
Накопление сигналов производится на участках «с и Ъс при зондировании под заданным углом S к горизонту и на участках oJ и е{ при зондировании под углом (можно вместо 3 участков накопления Ьс. и ef выбират соответственно участки offc и о1е . Взаимное расположение участков опре деляется соотношениями sinV sin Дополнительный угол зондирования может быть выбран или больше, или меньше заданного угла Ч . При этом, если заданный угол Ч велик и синус его блозок к единице, дополнительный угол У должен быть меньше угла V ; если заданный угол Ч мал, то следует выбирать угол V больше угла V . Для упрощения математических выкладок, разъясняющих сущность способа, приводится частный случай решения, Когда отношение синусов углов У к Отношения накопленных сигналов Jtf и Jy следующие:. с
)o(R
ъ
(2)
:..
ч-БТ:-3
1 4
(О
1- J, 17 d- и oL - средние показатели ослабления слоев ЛЬ- и лН соответственно;Значения Т и Ту определяют прозрачность атмосферы на участках трассы дЬ и rtc . При вьтоде формул (4) и (5) принято условие постоянства средних показателей ослабления oi- и oly в пределах соответствующих горизонтальных слоев дЬ и дН,Введя вспомогательной параметр B решая систему уравнений (4) и (6), можно определить прозрачность т,слоя л под углом Ц (B.J) а также общую прозрачность Ту слоя ДН под тем же углом 7
Sq.CR) olR
Si(R)dR
J(-rr
Sy(,R)cJR
: где SI(R) и Sy(() - скорректированные на квадрат расстояния сигнал обратного рассеяния, полученные с расстояний ( от лидара под углами зондирования ч и V соответственно.
Подставляя значения Sif(R) и SyCR), определяемые уравнением лазеной локации, в формулы (2) и (3), и учитывая выражение (1), после несложных преобразований получаем:
Т;-Т,
(4)
Ihl
(5)
:)
Г . 1 Г
ГД Т. ехр
однако зта величина, как показывает
анализ, определяется с большой погрешностью.
Способ при определении профиля к общей прозрачности горизонтального слоя атмосферы толщиной ДЬ под
заданным углом Ч к горизонту осуществляют следующим образом.
В зависимости от заданного значения угла Ч и диапазона измеряемых помутнений выбирается значение дополнительного угла зондирования V . При этом при более плотных значениях помутнений должны выбираться меньшие значения т(,2 - 1,5), при высоких прозрачностях тй 2 - 3, Выбор
значений ,2 не целесообразен, так как протяженность трасс аЬ и de в этом случае становится почти одинаковой и погрешность измерения резко вырастает. При m 3 - Л дополнительный угол t приходится выбирать очень малым по величине, что связано с большими погрешностями его установки; с другой стороны высота зондирования под разными углами оказывается различной в 3-4 раза. Исследование показывает, что оптимальные значения т 1,5-2. Протяженность слоя лН-лЪ; , в пределах которого производится накопление сигналов (участки ef и Ъс), желательно выбирать максимально возможной с точки зрения дальности действия лидара. Основное требование при выбор BbvcoTbi верхней границы 3 заключаетс в том, чтобы расстояние ос , соответствующее меньшему углу зондирова ния (в данном случае углу f), не превышало дальности действия лидара Определяют значение шага дискрет ного изменения протяженности зондир емого слоя, минимальное значение этого шага при зондировании под бол шим углом не должно быть меньше про тяженности элементарного разрешаемо по дальности объема атмосферы. В общем виде это условие формулируется так: минимальное значение шага пропорционально протяженности элементарного разрешаемого по дальности объема атмосферы с коэффициентом пропорциональности, равным отношени синуса большего угла к синусу угла, под которым производится зондирование (оптимальное значение шага долж но определяться от толщины зондируе мого слоя, требуемой детализации профиля и так далее и может во многЪ раз превосходить минимальное значение). Устанавливают лидар под заданным углом Ч к горизонту, для каждой посылки (или серии посьшок) произво дят накопление сигналов в пределах слоев cib и и определяют отношение накопленного сигнала в одном из этих слоев, например , к сумме накопленных сигналов в слое «с (аЪ) + (); при практическо реализации можно установить два накопителя, накапливающих сигналы в слоях и в суммарном слое ас одновременно. Минимальная протяженность участка яЦ определяется указанным условием. Повторяют это, дискретно меняя протяженность части зондируемого слоя, и определяют отношения накопленных сигналов на участках и ас и т.д. Устанавливают лидар под углом V и последовательно определяют отношения накопленных сигналов .7у на участках и .б1 , затем е f и т.д. По каждой паре отношений 3,.f и Гц, полученных при разньк углах зондиро вания и относящихся к одним и тем же горизонтальным слоям по монограммам или по формулам (7) и (8) если выполнено условие (1), при котором они выведены, определяют профиль и обшую прозрачность зондируемого слоя под углом Ч . Если необходимо определить лишь общую прозрачность слоя ЛЬ под углом If , то достаточно использовать лишь два отношения накопленных сигналов 3if и J выбрав пределы накапливаемых сигналов согласно формулам (2) и (3) и определяя прозрачность Т. по формуле (7). Для оценки достоверности полученного значения Т необходимо провести серию измерений отношений Ji и J, , сохраняя неизменными границы слоя 4h и меняя дискретно высоту верхней границы слоя дН. Проведя ряд измерений отношений DV и J(j; при разных значениях высоты верхней границы а Н и определяя каждый раз значение Т- , можно оценить достоверность полученных результатов: наличие каких-либо погрешностей или невьшолнение условий, положенных в основу способа, приводят к увеличению разброса величины к появлению ее монотонного хода при изменении высоты верхней границы слоя дН. Главной особенностью здесь является не увеличение числа измерений, а измерение условий каждого пос-, ледующего измерения. Одновременно появляется критерий выбора верхней границы слоя 4Н: при соседних дискретных значениях выбираемого значения лН значение не должно иметь существенного хода. Если ход наблюдается, что говорит о наличии крупномасштабных неоднородностей, то высота верхней границы слоя iH должна быть изменена в ту или иную сторону. Использование принципа равенства средних показателей ослабления в горизонтальных слоях большой протяженности и возможность проверки выполнимости этого условия в реальных условиях позволяют устранить появление неконтролируемых погрешностей способа, так как не требуется получение максимального накопленного сигнала. Предлагаемый способ позволяет простыми средствами, непосредственно ю результатам измерений оценивать
711632178
достоверность и надежность получен-делить профиль, но и уточнить значение
ных данных, при этом в качестве кри-прозрачности зондируемого слоя, не
терия могут быть использованыувеличивая число углов наклона зонобычные метрологические характеристи-дирования. Это существенно повышает
ки, например дисперсия определяемого 5оперативность получения данных и
параметра. Меняя протяженность участ-упрощает поворотное устройство
ков накопления, можно не только опре-лидара.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИЙ ГАЗОВЫХ КОМПОНЕНТОВ СЛОЯ АТМОСФЕРЫ | 1991 |
|
RU2017139C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ОСЛАБЛЕНИЯ В ЦЕНТРЕ УЧАСТКА НЕОДНОРОДНОЙ АТМОСФЕРЫ | 1992 |
|
RU2041475C1 |
| СПОСОБ ОПТИЧЕСКОГО ЗОНДИРОВАНИЯ НЕОДНОРОДНОЙ АТМОСФЕРЫ | 2011 |
|
RU2473931C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЗРАЧНОСТИ АТМОСФЕРЫ | 2009 |
|
RU2439626C2 |
| СПОСОБ ОПТИЧЕСКОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2010 |
|
RU2441261C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ВЫБРОСА | 1991 |
|
RU2028007C1 |
| Способ дистанционного оптического зондирования неоднородной атмосферы | 2015 |
|
RU2624834C2 |
| Способ определения показателя ослабления атмосферы | 1987 |
|
SU1597815A1 |
| КОРРЕЛЯЦИОННЫЙ СПОСОБ ПОВЫШЕНИЯ РАЗРЕШЕНИЯ ПО СКОРОСТИ И ДАЛЬНОСТИ ДЛЯ ИМПУЛЬСНЫХ ДОПЛЕРОВСКИХ СИСТЕМ С ВНУТРИИМПУЛЬСНОЙ КОГЕРЕНТНОЙ ОБРАБОТКОЙ | 2012 |
|
RU2518009C1 |
| СПОСОБ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ НЕОДНОРОДНОЙ АТМОСФЕРЫ | 2013 |
|
RU2547474C1 |
СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЗРАЧ НОСТИ АтаОСФЕРЫ путем йосылки в атмосферу под углом к горизонту по трассе зондирования светового импул са, преобразования обратно рассеянных сигналов в сигналы электрическо тока и накопления в пределах исслед емого слоя и всей трассы зондирован с последующим определением их отнош ния, отличающийся тем, что, с целью повышения точности, посылают в атмосферу дополнительный световой импульс под другим углом к горизонту, преобразуют и накапливают обратно рассеянные сигналы аналогично преобразованию и накоплению обратно рассеянных сигналов основного светового импульса, при этом время от момента посылки дополнительного импульса до начала накопления и промежутки времени накопления устанавливают пропорционсшьными соответствующим промежуткам времени при посылке основного светового импульса с коэффициентом пропорциональности, равным отношению синусов углов посыпки основного и дополнительного импульсов, и по двум отношениям накопленных сигналов судят об.их искомом параметре. у.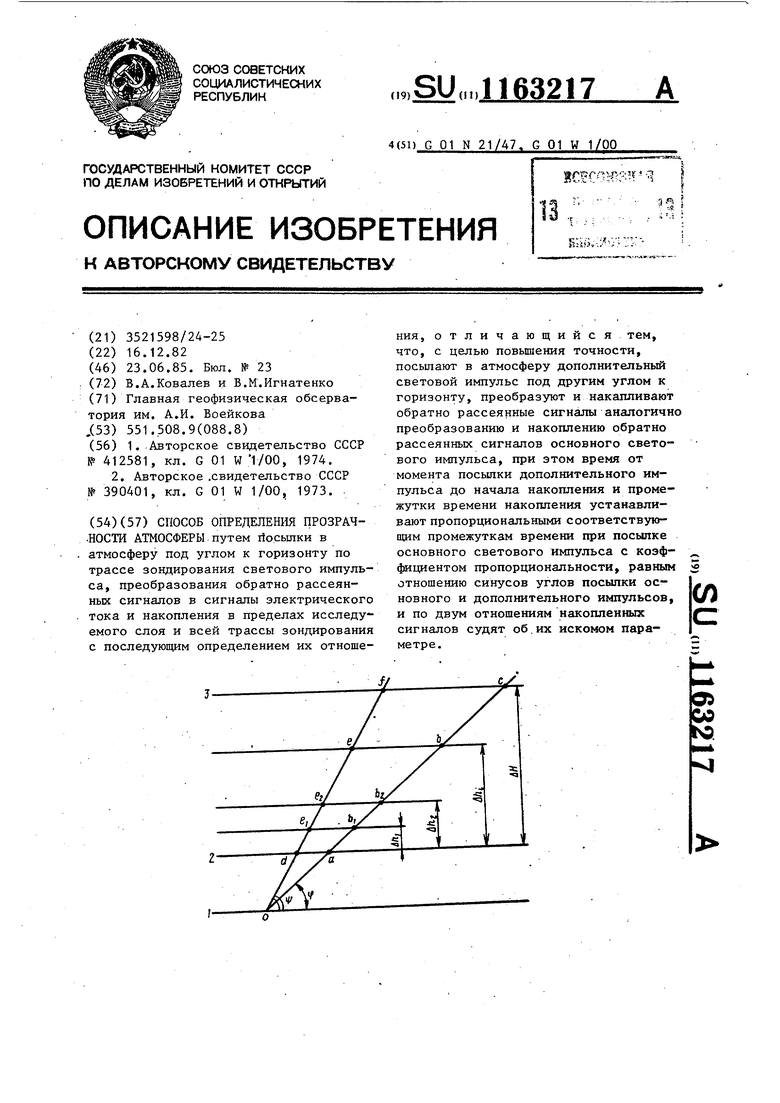
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЗРАЧНОСТИ АТМОСФЕРЫ | 0 |
|
SU390401A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
