Изобретение относится к электротехнике и может быть использовано в системах автоматического управления с шаговыми двигателями.
Цель изобретения - расширение диапазона регулирования и повышение точности стабилизации скорости.
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - функциональная схема блока выделения ЭДС враш.ения, используемого в качестве одного канала датчика положения ротора; на фиг. 3 - временные диаграммы, иллюстрирующие работу устройства.
Устройство (фиг. 1) содержит шаговый двигатель 1 с фазами 1.1, 1.2, 1.3, 1.4, соединенными с выходами усилителей мощности 2, 3, 4 и 5 соответственно, генератор управляемой частоты 6, выход которого соединен с распределителем импульсов 7, датчик положения ротора двигателя, выполненный в виде блоков 8, 9, 10 и 11 выделения ЭДС врашения, и блок 12 выделения фазового сдвига импульсов генератора относительно импульсов датчика положения, состоящий из триггеров сравнения 13, 14, 15 и 16 управляющего / -5-триггера 17 и коммутатора каналов 18.
Вход 5-триггера 17 соединен с шиной запуска устройства 19, вход R - с одним из выходов датчика положения, включающего блоки выделения ЭДС вращения по числу фаз двигателя (на фиг. 1 вход R соединен с блоком выделения ЭДС - поз.9).
Выходы триггера 17 соединены с управляющими входами Vx, Vy коммутатора каналов 18, подключенного адресными входами Х|, Х2, хз, Х4 к выходам распределителя импульсов 7, информационными входами уь У2, УЗ, У4 - к выходам блоков выделения ЭДС вращения 8, 9, 10, 11, а выходами - к вторым установочным входам триггеров сравнения 13, 14, 15 и 16, соединенных первыми установочными входами с выходами распределителя импульсов 7. Выходы триггеров сравнения 13-16 подключены к входам усилителей мощности 2-5.
Б качестве датчика положения ротора в устройстве используются блоки выделения ЭДС вращения по числу фаз двигателя 8-11 несущей информацию о положении ротора двигателя.
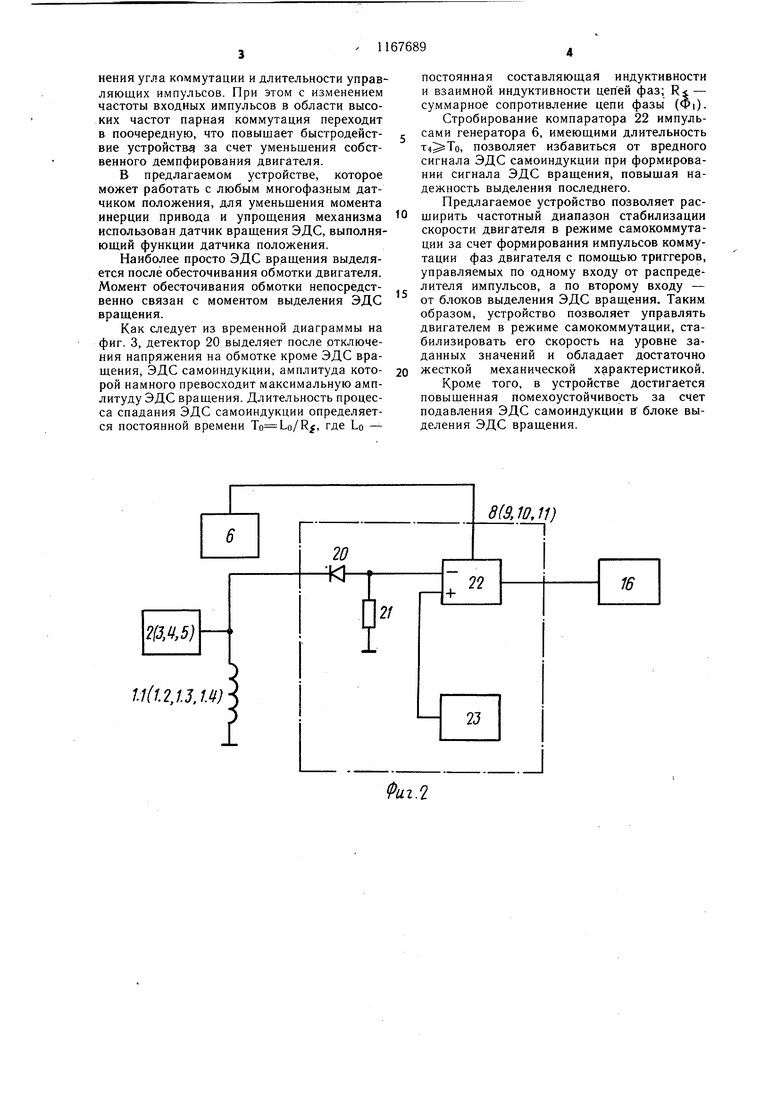
Каждый блок выделения ЭДС вращения (фиг. 2) содержит детектор 20, подключенный к фазе шагового двигателя 1, резистор 21 и компаратор 22, первый вход которого подключен к детектору 20 и резистору 21. К второму входу компаратора 22 подключен источник опорного напряжения 23.
Устройство работает следующим образом.
Для отработки программируемого по скорости перемещения по щине 19 подается команда «Старт (фиг. 3) в виде импульсного сигнала. / г5-триггер 17 переключаются в единичное состояние и переключает коммутатор 18 на пропускание последовательности импульсов от распределителя импульсов 7 на первые установочные входы триггеров 13-16, на вторые установочные входы которых поступают импульсы от распределителя импульсов 7 со сдвигом на один период
входных импульсов генератора 6. На вход усилителей мощности 2-5 поступают импульсы, сформированные триггерами 13-16. В результате организуется принудительная коммутация двигателя 1. При перемещении
ротора двигателя 1 возникают сигналы ЭДС вращения, которые формируются блоками выделения 8-11, и поступают на первые входы коммутатора 18. После детектирования детектором 20 сигнал ЭДС вращения с фазы двигателя I выделяется на резис5 торе 21.
Источник опорного напряжения 23 устанавливает уровень формирования сигнала обратной связи по положению ротора из сигнала ЭДС вращения с учетом характеристики нагрузки, который формируется с помощью компаратора 22. Один из сигналов блока выделения ЭДС вращения, например блока 9, поступает на второй установочный вход / -5-триггера 17 и устанавливает его в исходное состояние. Осуществив запуск
5 двигателя, синхронизированный с работой распределителяимпульсов 7, триггер 17 переключает коммутатор 18 в режим пропускания сигналов от блоков 8-11 на первый установочный вход триггеров 13-16. С этого момента двигатель 1 переходит на режим
0 самокоммутации по сигналу положения ротора, сформированному из сигналов ЭДС вращения. При этом передний фронт управляющих импульсов, поданных на фазы двигателя, обусловлен моментом формирования сигналов ЭДС вращения, а задний фронт-
импульсами распределителя импульсов 7. Частота генератора 6 задает темп переключения фаз двигателя 1. Запуск устройства осуществляется начиная с любой Частоты в пределах частоты приемистости двигателя.
0 Дальнейшая работа устройства происходит в режиме самокоммутации при изменении частоты генератора от нуля до частоты, определяемой границей механической характеристики двигателя. Работа устройства поясняется временными диаграммами
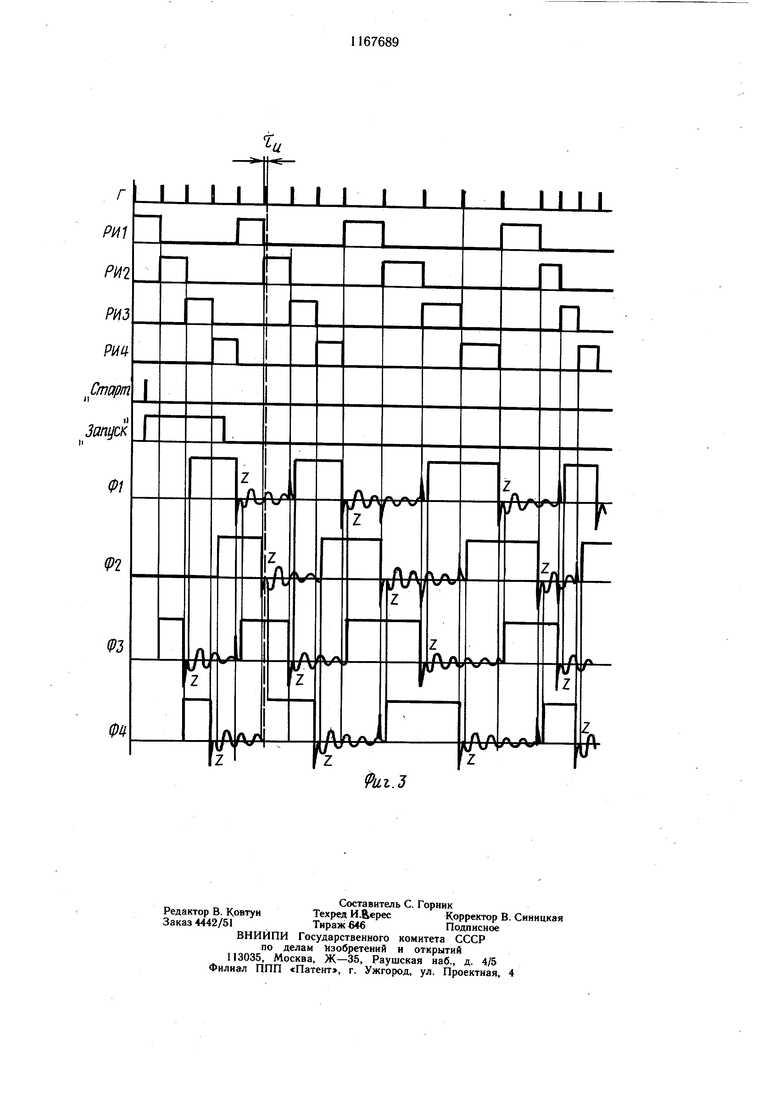
5 (фиг. 3), на которых приведены следующие сигналы: Г - на выходе генератора импульсов 6, РИ1....РИ4 - на выходе распределителя импульсов 7, «Старт - на шине подачи команды «Старт 19, «Запуск - на прямом выходе/ -S-триггера 17, Ф1...Ф4- на фазах двигателя 1 при двух скачкообразных изменениях частоты управления. Точкой Z на диаграмме обозначен момент формирования сигналов обратной связи из сигналов ЭДС вращения.
5 Из приведенных на фиг. 3 диаграмм следует, что эффект стабилизации скорости двигателя около заданного значения при частотном управлении в режиме самокоммутации достигается за счет плавного изменения угла коммутации и длительности управляющих импульсов. При этом с изменением частоты входных импульсов в области высоких частот парная коммутация переходит в поочередную, что повышает быстродействие устройства за счет уменьшения собственного демпфирования двигателя.
В предлагаемом устройстве, которое может работать с любым многофазным датчиком положения, для уменьшения момента инерции привода и упрощения механизма использован датчик вращения ЭДС, выполняющий функции датчика положения.
Наиболее просто ЭДС вращения выделяется после обесточивания обмотки двигателя. Момент обесточивания обмотки непосредственно связан с моментом выделения ЭДС вращения.
Как следует из временной диаграммы на фиг. 3, детектор 20 выделяет после отключения напряжения на обмотке кроме ЭДС вращения, ЭДС самоиндукции, амплитуда которой намного превосходит максимальную амплитуду ЭДС вращения. Длительность процесса спадания ЭДС самоиндукции определяется постоянной времени To Lo/Rf, где LO -
постоянная составляющая индуктивности и взаимной индуктивности цепей фаз; суммарное сопротивление цепи фазы (Ф)).
Стробирование компаратора 22 импульсами генератора 6, имеющими длительность , позволяет избавиться от вредного сигнала ЭДС самоиндукции при формировании сигнала ЭДС вращения, повышая надежность выделения последнего.
Предлагаемое устройство позволяет расширить частотный диапазон стабилизации скорости двигателя в режиме самокоммутации за счет формирования импульсов коммутации фаз двигателя с помощью триггеров, управляемых по одному входу от распределителя импульсов, а по второму входу - от блоков выделения ЭДС вращения. Таким образом, устройство позволяет управлять двигателем в режиме самокоммутации, стабилизировать его скорость на уровне заданных значений и обладает достаточно жесткой механической характеристикой.
Кроме того, в устройстве достигается повышенная помехоустойчивость за счет подавления ЭДС самоиндукции вг блоке выделения ЭДС вращения.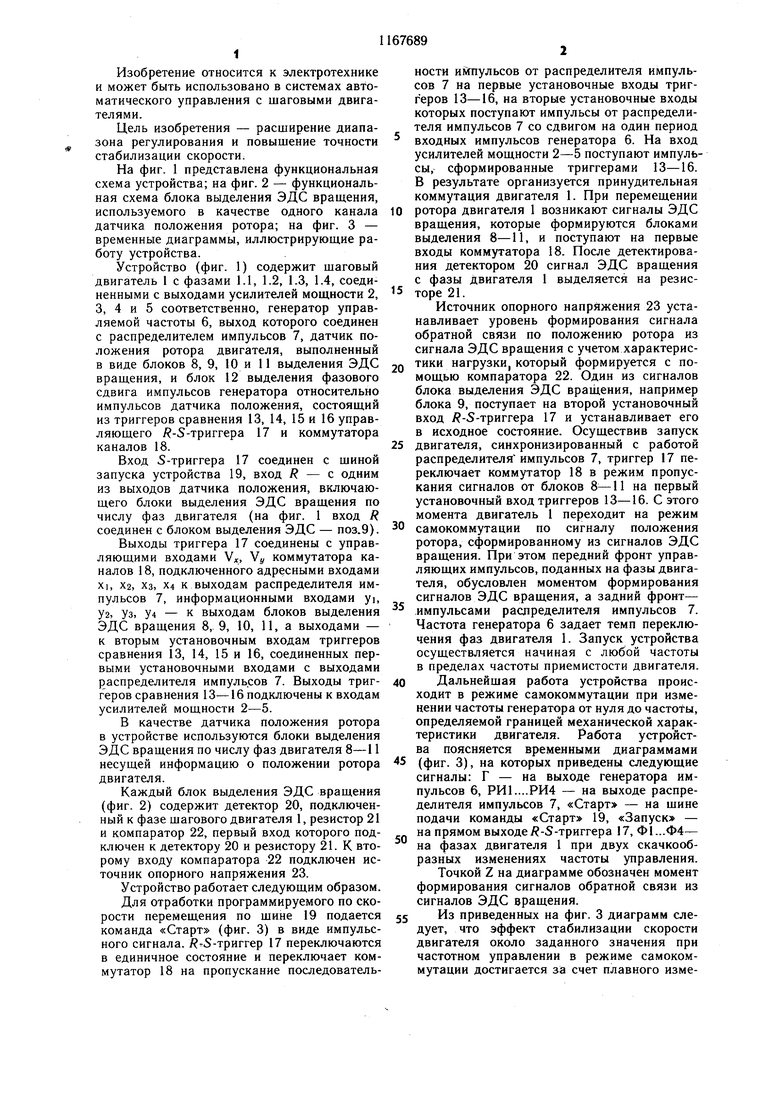
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления позиционированием | 1985 |
|
SU1267360A1 |
| Шаговый электропривод | 1986 |
|
SU1372585A1 |
| Дискретный электропривод со стабилизацией скорости | 1983 |
|
SU1108601A1 |
| Устройство для управления шаговым двигателем | 1987 |
|
SU1480079A1 |
| Устройство для управления реверсивным бесконтактным электродвигателем постоянного тока | 1976 |
|
SU628597A1 |
| Способ управления шаговым двигателем и устройство для его осуществления | 1985 |
|
SU1310993A1 |
| Устройство для управления трехфазным шаговым двигателем | 1986 |
|
SU1365343A1 |
| Устройство для программного управления шаговым двигателем | 1985 |
|
SU1314312A1 |
| Устройство для управления шаговым электродвигателем | 1974 |
|
SU744888A1 |
| Устройство для программного управления шаговым двигателем | 1981 |
|
SU1012207A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ В РЕЖИМЕ САМОКОММУТАЦИИ, содержащее датчик положения ротора двигателя, усилители мощности, каждый из которых подключен выходом к фазе двигателя, распре-, делитель импульсов, соединенный . входом с выходом генератора импульсов, и блок выделения фазового сдвига импульсов генератора относительно импульсов датчика положения, отличающееся тем, что, с целью расширения диапазона регулирования и повышения точности стабилизации скорости, блок выделения фазового сдвига импульсов генератора относительно импульсов датчика положения выполнен в виде коммутатора каналов, управляющего / -5-триггера и триггеров сравнения по числу фаз двигателя, подключенных выходами, являющимися выходами блока выделения фазового сдвига, к входам усилителей мощности, первыми установочными входами - к выходам распределителя импульсов и адресным входам коммутатора каналов, соединенного выходами с вторыми установочными входами триггеров сравнения, ииформационными входа(Л ми - с выходами датчика положения, ротора, а управляющими входами - с выходами управляющего / -5-триггера, соединенного / входом с одним из выходов датчика положения ротора. о: 1 О) 00 со
Г
20
Ь
8(9,10,11)
.J
(аг.г
Т
и
г
РИ1 РИ2
РИЗ
Рт
Старт
Запуск
|
01
Ф2
аг.З
| Луценко В | |||
| Е., Рубцов В | |||
| П | |||
| Электропривод с шаговыми двигателями | |||
| Обзор «Итоги науки и техники | |||
| Электропривод и автоматизация промышленных установок | |||
| ВИНИТИ | |||
| М., т | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| Дискретный электропривод со стабилизацией скорости | 1976 |
|
SU658693A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
