ли 3, в состав каждого из которых вхо- дя Т элемент ИЖ 6, управляемый поро- говый элемент 7, элементы И 8,9,10, ключи 11,12,13, вентили 14,15,16, элемент 17 односторонней проводимости, обмотки 18 двигателя, датчик тока 20, блок Дифференцирования 19, а так1
Изобретение относится к автоматике и может быть использовано в системах управления с шаговым двигателем.
Цель изобретения - повьшение надежности устройства за счет фиксации аварийного состояния в многоканальных усилителях и обмотках двигателей путем сокращения оборудования, необходимого для его реализации.
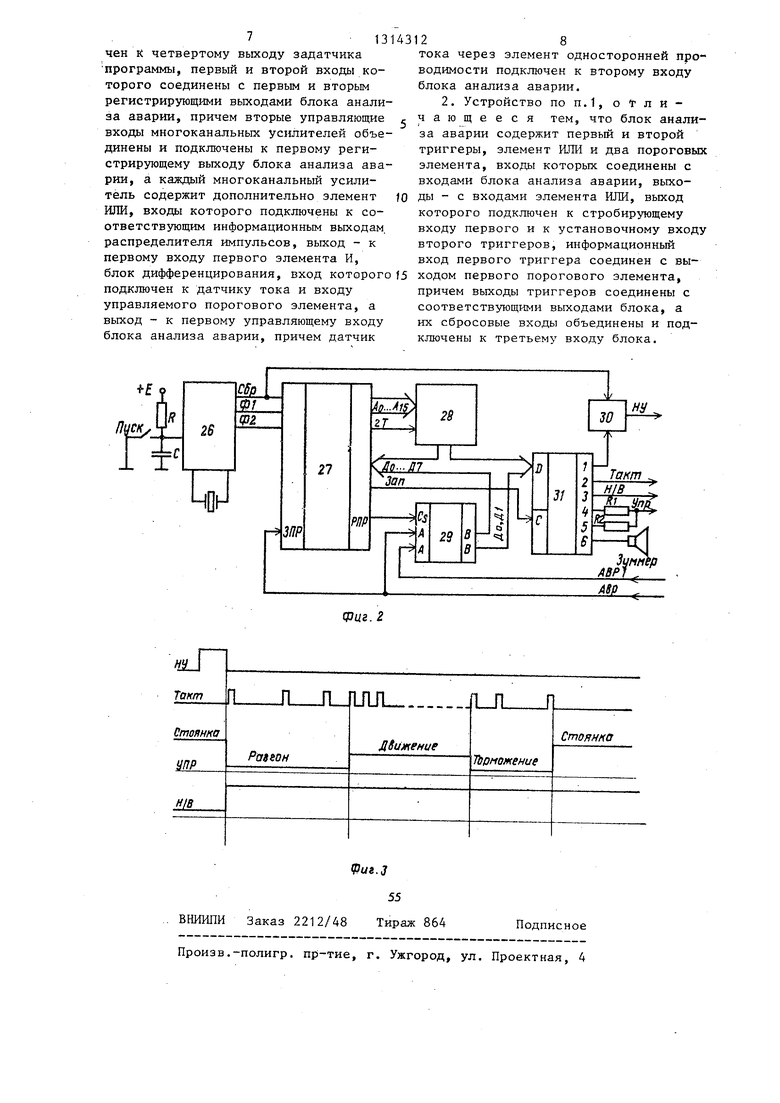
На фиг.1 изображена функциональная схема предлагаемого устройства; на фиг.2 - пример реализации задатчика программ; на фиг.З - временные диаграммы работы устройства.
Устройство содержит задатчик 1 программ j.распределитель 2 импульсов, многоканальные усилители 3, блок 4 анализа аварии, блок 5 формирования элемент ИЛИ 6, управляемый пороговый элемент 7, элементы И 8 - 10, ключи |11 - 13, вентили 14 - 16, элемент 17 односторонней проводимости, обмотки 18 двигателя, блок 19 дифференцирования, датчик 20 тока, триггеры 21 и 22, второй элемент ИЛИ 23 и пороговые элементы 24 и 25,
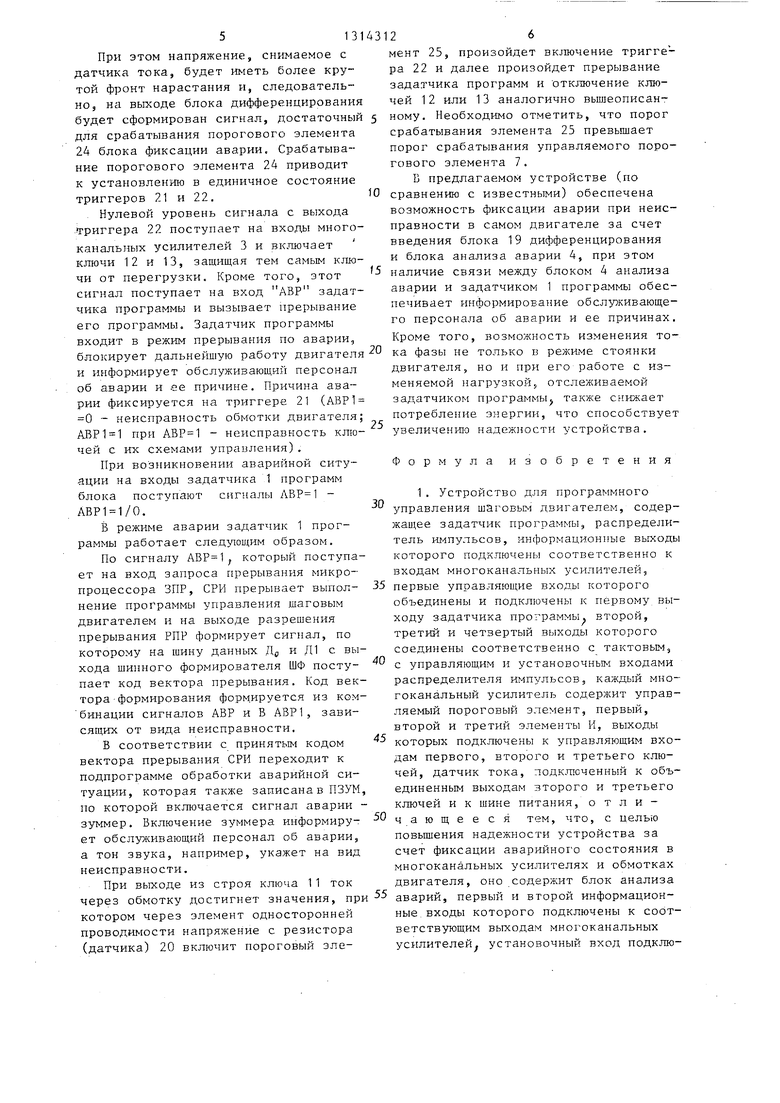
Задатчик 1 программ содержит генератор 26 тактовых импульсов (ГТИ) с элементами установки в исходное состояние, процессор 27, постоянное запоминающее устройство 28 (ПЗУ), шинный формирователь 29, элемент ИЛИ 30 и регистр 31, с выходов которого формируются сигналы управления шаговьм двигателем,
Выходы Такт, Н/В - направление вращения, НУ - начальная установка, Упр - управление режимом стоянки двигателя являются выходами шины данных микропроцессора.
По щине Такт подается синхросигнал, по которому происходит поочередное переключение фаз двигателя, напже блок 4 анализа аварии на триггерах 21,22, элементе ИЛИ 23, пороговых элементах 24,25. Наличие блока анализа аварии позволяет фиксировать неисправности, обеспечивает информирование обслуживающего персонала об аварии и ее причинах. 1 з.п. ф-лы, 3 ил.
5
0
5
0
5
0
равление вращения задается сигналом Н/В.
Распределитель 2 импульсов представляет собой многоразрядный регистр с числом разрядов, соответствующим количеству тактов коммутации, например для ШД-5Д требуется 12 тактов коммутации и, следовательно, двенадцатиразрядный регистр сдвига, который .может быть реализован из двух микросхем типа К|55ИР13.
Непосредственное подключение выхода Такт задатчика программы ко входу распределителя 2 импульсов обеспечивает возможность использования сигнала УПР не только в режиме стоянки, но и при движении двигателя (например, когда нагрузка на двигатель уменьшается, целесообразно уменьшать ток фазы, что даст дополнительное снижение потребляемой мощности по сравнению с прототипом).
Устройство работает следующим образом.
При включении питания или по команде программы задатчик программы, формирует на выходе НУ короткий импульс, который устанавливает в исходное состояние распределитель 2 импульсов и блок 4 анализа аварии.
Далее задатчик 1 программы опр.еде- ляет.направление вращения шагового двигателя путем формирования соответствующего уровня сигнала на выходе Н/В (1 - левое вращение, О - праззое вращение), а на выходе Такт формирует импульсную последовательность, число импульсов которой равно количеству шагов перемещения шагового з;вигателя.
На выходе УПР формируется сигнал низкого уровня - О, который обеспечивает высокий уровень срабатывания
313
управляемого порогового элемента 7, при котором ток через обмотки 18 достигает максимальрюго значения (режим разгона -.торможения).
Возбуждение обмотки шагового дви- гателя происходит следующим образом.
Единичный уровень сигнала с соответствующих выходов распределителя поступает на входы элемента ИЛИ 6 и далее на вход элемента И 8, на второй вход которого также поступает единичный сигнал с выхода управляемого порогового элемента 7. При этом элемент И 8 открывает ключ 11, к которому подключены две одновременно неработающие обмотки. Кроме того, единичный уровень сигнала от распределителя импульсов поступает на первые входы элемента И 9 или элемента И 10, на вторые входы которых посту- пает единичный уровень сигнала с выхода триггера 22 блока 4. При этом открывается один из ключей 12 или 13 и происходит включение тока через одну из обмоток 18.
Ток от источника Е2 питания через диод блока 5 формирования, открытый ключ 11, обмотку 18 и один из ключей 12 или 13 замыкается на вторую шину источника питания через датчик 20 тока, выполненный в виде резистора. При этом происходит постепенное нарастание тока в обмотке 18.
При достижении тока заданного уровня напряжение на резисторе (датчике) 20 становится достаточньп для срабатывания управляемого порогового элемента 7, на выходе которого сформируется низкий уровень сигнала, т.е.
1
произойдет выключение ключа 11.
ЭДС самоиндукции через ключ 13, резистор (датчик) 20 и открытый ключ 12 (или 13) замыкается на обмотку 18 и препятствует быстрому спаду тока в катушке. Ток в катушке медленно уме- ньшается. При дальнейшем уменьшении тока напряжение на резисторе (датчике) 20 также уменьшается и происходит выключение порогового элемента 7, т.е на его выходе формируется снова еди- ничный уровень сигнала и снова включается ключ 11. Таким образом поддерживается заданный максимальный ток в обмотке.
При выключении фазы единичный уровень. сигнала с выхода распределителя изменяется на нулевой и происходит отключение ключей 11 и 12 (или 13)
124
В этом случае ЭДС самоиндукции через вентили 14 и 15 (или 16) замыкается на емкость блока формирования, так как происходит рекуперация энергии, что существенно повышает КПД устройства.
Кроме того, необходимо отметить, что замыкание ЭДС самоиндукции на емкость блока 5 формирования, которая значительно меньше, чем внутренняя емкость источника Е2, обеспечивает более быстрое исчезновение тока в обмотке при ее отключении, что улучшает динамические характеристики двигателя по сравнению с известными устройствами.
При работе шагового двигателя с пониженной нагрузкой в предлагаемом устройстве (в отличие от известного) возможно программное уменьшение тока фазы, что еш,е больше повьш ает КПД устройства. В этом режиме задатчик программы на выходе УПР формирует сигнал более высокого уровня, чем в режиме с максимальной нагрузкой двигателя. Поэтому управляемый пороговый элемент 7 срабатывает при меньшем напряжении на резисторе (датчике) 20, следовательно, ток в обмотках также будет поддерживаться на уровне, достаточном для работы, но меньшим по сравнению с максимальным током.
В режиме стоянки уровень сигнала УПР еще больше увеличивается, что также способствует уменьшению тока в обмотках, что, в конечном счете, увеличивает надежность и долговечность работы шагового двигателя.
В случае возникновения аварийной ситуации предлагаемое устройство работает следующим образом.
При возникновении неисправности в обмотке 18 (например, межвитковое замыкание, к.з. выводов, уменьшение магнитных свойств сердечника обмоток, увеличение активного сопротивления обмоток из-за нагрева) резко уменьшается добротность индуктивности, что приводит к отказу устройства. В этом случае скорость нарастания тока в обмотке будет определяться постоянной времени цепи, равной.
г t
R где L - индуктивность цепи;
R - сопротивление цепи и будет
больше, чем скорость нарастания тока в исправной обмотке.
513
При этом напряжение, снимаемое с датчика тока, будет иметь более крутой фронт нарастания и, следовательно, на выходе блока дифференцирования будет сформирован сигнал, достаточный для срабатывания порогового элемента 24 блока фиксации аварии. Срабатывание порогового элемента 24 приводит к установлению в единичное состояние триггеров 21 и 22,
, Нулевой уровень сигнала с выхода триггера 22 поступает на входы многоканальных усилителей 3 и включает ключи 12 и 13, защищая тем самым ключи от перегрузки. Кроме того, этот сигнал поступает на вход АВР задат- чика программы и вызывает прерывание его программы. Задатчик программы входит в режим прерывания по аварии, блозсирует дальнейшую работу двигателя и информирует обслуживающий персонал об аварии и ее причине. Причина аварии фиксируется на триггере 21 (АВР1 0 - неисправность обмотки двигателя; при - неисправность ключей с их схемами упрацления).
При возникновении аварийной ситуации на входы задатчика 1 программ блока поступают сигналы - .
Б режиме аварии задат шк 1 программы работает следующим образом.
По сигналу , который поступает на вход запроса прерывания микропроцессора ЗПР, СРИ прерывает выполнение программы управления шаговым двигателем и на выходе разрешения прерывания РПР формирует сигнал, по которому на щину данных Д и Д1 с выхода формирователя ШФ поступает код вектора прерывания. Код вектора формирования формируется из ком- бинации сигналов АВР и В АВР1, зависящих от вида неисправности.
В соответствии с принятым кодом вектора прерывания СРИ переходит к подпрограмме обработки аварийной ситуации, которая также записана в ПЗУМ, по которой включается сигнал аварии - зуммер. Включение зуммера информирует обслуживающий персонал об аварии, а тон звука, например, укажет на вид неисправности.
При выходе из строя ключа 11 ток через обмотку достигнет значения, при котором через элемент односторонней проводимости напряжение с резистора (датчика) 20 включит пороговый эле
0
5
0
5
0
5
0
5
0
5
126
мент 25, произойдет включение триггера 22 и далее произойдет прерывание задатчика программ и отключение ключей 12 или 13 аналогично вьшзеописан- ному. Необходимо отметить, что порог срабатывания элемента 25 превьш ает порог срабатывания управляемого порогового элемента 7.
В предлагаемом устройстве (по сравнению с известными) обеспечена возможность фиксации аварии при неисправности в самом двигателе за счет введения блока 19 дифференцирования и блока анализа аварии 4, при этом наличие связи между блоком 4 анализа аварии и задатчиком 1 программы обеспечивает информирование обслуживающего персонала об аварии и ее причинах. Кроме того, возможность изменения тока фазы не только в режиме стоянки двигателя, но и при его работе с изменяемой нагрузкой, отслеживаемой задатчиком программы также снижает потребление энергии, что способствует увеличеншэ надежности устрор ства.
Формула изобретения
1. Устройство для программного управления шаговым двигателем, содержащее задатчик программы, распределитель m-inynbcoB, информационные выходы которого подключены соответственно к входам многоканальных усилителей, первые управляюище входы которого объединены и подключены к первому выходу задатчика программы, второй, третий и четвертый выходы которого соединены соответственно с тактовым, с управляющим и установочным входами распределителя импульсов, каждый многоканальный усилитель содерлсит управляемый пороговый элемент, первый, второй и третий элементы И, выходь которых подключены к управляющим входам первого, второго и третьего ключей, датчик тока, подключенный к объединенным выходам второго и третьего ключей и к шине питания, о т л и - чающе е с я тем, что, с целью повьш1ения надежности устройства за счет фиксации аварийног о состояния в многоканальных усилителях и обмотках двигателя, оно содержит блок анализа аварий, первый и второй информационные, входы которого подключены к соответствующим выходам многоканальных ycилитeлeй установочный вход подклю713
чен К четвертому выходу задатчика Программы, первый и второй входы которого соединены с первым и вторым регистрирующими выходами блока анализа аварии, причем вторые управляющие входы многоканальных усилителей объединены и подключены к первому регистрирующему выходу блока анализа аварии, а каждый многоканальный усилитель содержит дополнительно элемент ИЛИ, входы которого подключены к соответствующим информационным выходам, распределителя импульсов, выход - к первому входу первого элемента И, блок дифференцирования, вход которого подключен к датчику тока и входу управляемого порогового элемента, а выход - к первому управляющему входу блока анализа аварии, причем датчик
тока через элемент односторонней проводимости подключен к второму входу блока анализа аварии.
2. Устройство по П.1, отличающееся тем, что блок анализа аварии содержит первый и второй триггеры, элемент ИЛИ и два пороговых элемента, входы которых соединены с входами блока анализа аварии, выходы - с входами элемента ИЛИ, выход которого подключен к стробирующему входу первого и к установочному входу второго триггеров, информационный вход первого триггера соединен с выходом первого порогового элемента, причем выходы триггеров соединены с соответствующими выходами блока, а их сбросовые входы объединены и подключены к третьему входу блока.
f
фцг.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления шаговым двигателем | 1989 |
|
SU1667007A1 |
| Устройство для программного управления шаговым двигателем | 1982 |
|
SU1043598A1 |
| Устройство для программного управления шаговым двигателем | 1985 |
|
SU1267363A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Устройство для программного управления шаговым двигателем | 1981 |
|
SU1012207A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1658367A1 |
| Устройство для автоматического регулирования температуры | 1988 |
|
SU1645945A1 |
| Устройство для программного управления шаговым двигателем | 1981 |
|
SU1015339A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1379936A1 |
| Устройство для управления многофазным шаговым электродвигателем | 1982 |
|
SU1037410A1 |
Изобретение относится к области автоматики и предназначено для использования в системах управления с шаговым двигателем. Цель изобретения - повышение надежности устройства за счет фиксации аварийного состояния в многоканальных усилителях и обмотках двигателя. Устройство содержит задатчик программы 1, распределитель импульсов 2, многоканальные усилите (Л со 00
| Экстремальный регулятор режима обработки на металлорежущих станках | 1980 |
|
SU1015338A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного управления шаговым двигателем | 1982 |
|
SU1043598A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
