Изобретение относится к машиностроению и может быть использовано в скоростных передачах одностороннего действия с повышенным уровнем вибрации. Цель изобретения - повышение надежности путем уменьшения угла относительного поворота силовых элементов механизма до их полного сцепления. На фиг. 1 показан предлагаемый механизм; разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б. на фиг. 1. Механизм свободного хода содержит храповое колесо 1 внутреннего зацепления, которое установлено на одном валу с обоймой 2, собачки 3 в виде двуплечих рычагов, закрепленные на звездочке 4, тела заклинивания в виде роликов 5, находящихся в окнах сепаратора 6, подпружиненного относительно звездочки пружиной 7 кручения. Пружина 8 расположена между собачкой 3 и звездочкой 4 и отводит собачку от зубьев храпового колеса 1. Звездочка 4 у Звездочка 4 установлена на шлицевой зтулке 9 с возможностью ограниченного вращательного перемещения. На поверхности шлицевой втулки выполнены шлицы 10, которые входят в дугообразные выемки 11 с зазором, выполненные на внутренней поверхноети звездочки 4. На шлицевой втулке 9 расположены упругие упоры в виде штифтов 12 и пружин 13, с которыми контактируют дополнительные хвостовики 14 собачек 3. При этом жесткость пружин 13 значительно превышает жесткость пружин 8. Обойма 2 установлена в кольцевой проточке вала 15 и прижата к торцовой поверхности проточки нажимным фрикционным диском 16 с помощью плоской пружины 17, образующих тормозное устройство, расположенное между обоймой 2 и храповым колесом 1. В исходном состоянии силой пружин 8 собачки отжаты от зубьев храпового колеса, при этом в результате взаимодействия собачек с упругими упорами звездочка 4 реактивным моментом повернута относительно вала по часовой стрелке в крайнее положение до соприкосновения шлицев 10 шлицевой втулки и звездочки. В таком положении собачки и звездочка удерживаются силой пружин 8, величина которой определяется с учетом центробежных сил, действующих на собачки при вращении звездочки. Рассмотрим работу механизма, например, для случая, когда ведущим звеном является шлицевая втулка 9. В этом случае механизм свободного хода работает следующим образом. Перемещение шлицевой втулки 9 совместно с упруго связанной с ним звездочкой 4 относительно ведомого вала 15 и храпового колеса 1 в направлении передачи крутящего момента (против часовой стрелки на фиг. 2) приводит к практически мгновенному заклиниванию роликов 5, находящихся в постоянном контакте с обоймой 2 и звездочкой 4 под действием силы пружины 7. В результате заклинивания роликов звездочка 4 соединяется с обоймой 2 и валом 15, после чего они начинают перемещаться совместно с одинаковой угловой скоростью. При этом неподвижность обоймы 2 относительно вала 15 обеспечена тормозным устройством. В связи с тем, что после заклинивания роликов шлицевая втулка 9 начинает опережать в своем движении звездочку (а также храповое колесо и обойму), упругие упоры, воздействуя на хвостовики 14 собачек 3, через пружину 13 разворачивают собачки вокруг их осей по часовой стрелке, преодолевая силу пружин 8. Разворот собачек вокруг собственных осей продолжается до момента их соприкосновения со скосами на тыльной стороне зубьев храпового колеса. после чего из-за невозможности дальнейшего вращения собачек возрастает нагрузка на пружины 13 и сопряженные с ними хвостовики 14 собачек 3 со стороны упругих упоров щлицевой втулки 9. При этом происходит частичная деформация пружин 13 и на осях собачек появляется дополнительный реактивный момент, стремящийся развернуть звездочку относительно обоймы и храпового колеса в направлении вращения щлицевой втулки 9 {против часовой стрелки на фиг. 2). В результате .продолжающегося вращения щлицевой втулки 9 относительно звездочки и сжатия пружин 13 возрастает реактивный момент на звездочке. При достижении заданной предельной величины этого момента равной тормозному моменту, создаваемому тормозным устройством, обойма 2 вместе-со звездочкой 4 и заклиненными роликами 5 проворачивается относительно вала 15 и храпового колеса 1 в направлении действующего на нее момента на некоторый угол. В результате перемещения обоймы появляется возможность дальнейшего разворота собачек, упирающихся в скосы зубьев храпового колеса, но не вошедших еш,е в зацепление с храповым колесом. Таким образом, под действием силы пружин 13 происходит одновременно и поворот звездочки относительно храпового колеса против часовой стрелки, и разворот собачек вокруг собственных осей (по часовой стрелке) со скольжением по скосам зубьев до момента их сцепления с зубьями храпового колеса. В момент полного зацепления собачек с зубьями храпового колеса дальнейшии их поворот вокруг осей становится невозможным. Поэтому в результате продолжающегося перемещения шлицевой втулки 9 относительно звездочки 4 под дей ствием приложенного крутящего момента сжимаются пружины 13 и выбираются зазоры между шлицами втулки 9 и звездочки. Только после этого становится возможной передача полного крутящего момента от шлицевой втулки 9 к валу 15 через храповой механизм.
В случае уменьшения крутяшего момента до нуля и увеличения частоты вращения вала 15 по сравнению со шлицевой втулкой 9 собачки под действием силы пружин 8 выходят из взаимодействия с храповым колесом. При этом одновременно под действием упругого реактивного момента происходит поворот звездочки относительно шлицевой втулки 9 в исходное положение до упора щлицев 10 в поверхности выемок 11. Начинается свободный ход механизма без контакта собачек с храповым колесом. Готовность к новому циклу включения обеспечивает роликовая муфта, которая в этот период также работает в режиме обгона.
Работоспособность предлагаемого механизма не зависит от того, какой вал является ведущим. Если ведущим является вал 15, включение механизма происходит аналогичным образом, мёняется только направление вращения звеньев.
Величина перемещения обоймы 2, относительно вала 15 под действием реактивного момента на звездочке при каждом включении механизма зависит от случайного расположения собачек относительно профиля зубьев в момент начала включения механизма и не превышает расстояния между вершинами двух соседних зубьев храпового колеса.
После зацепления храпового механизма возможна разгрузка роликовой муфты и полное расклинивание малонагруженных роликов 5 в процессе длительной работы передачи в условиях вибраций, что не снижает надежность всего механизма и способствует увеличению срока службы.
Пружины 13 помимо выполнения указанных функций способствуют также смягчению толчков и ударов в момент зацепления 0 собачек с храповым колесом и последующей выборки зазоров между щлицами вала и впадинами звездочки.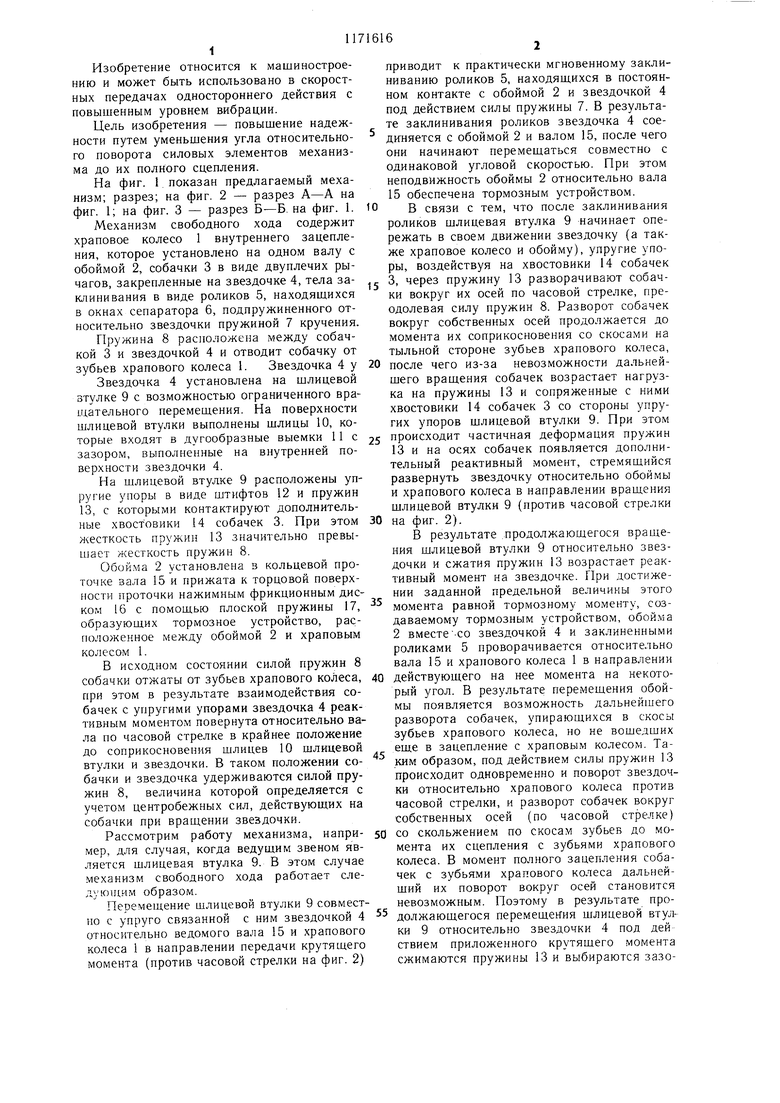

| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ НАТЯЖЕНИЯ И ОТПУСКА ОСНОВЫ НА ТКАЦКОМ СТАНКЕ | 2003 |
|
RU2240390C2 |
| Реверсивная муфта свободного хода | 1986 |
|
SU1318752A1 |
| Тормозная втулка велосипеда | 1989 |
|
SU1689199A1 |
| ВАРИАТОР | 1997 |
|
RU2151934C1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1972 |
|
SU432310A1 |
| ТОРМОЗНАЯ ВТУЛКА КОЛЕСА ВЕЛОСИПЕДА | 1991 |
|
RU2009940C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 1995 |
|
RU2087781C1 |
| Коробка передач | 1983 |
|
SU1191656A1 |
| Механизм свободного хода | 1974 |
|
SU489891A2 |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2002 |
|
RU2221943C2 |
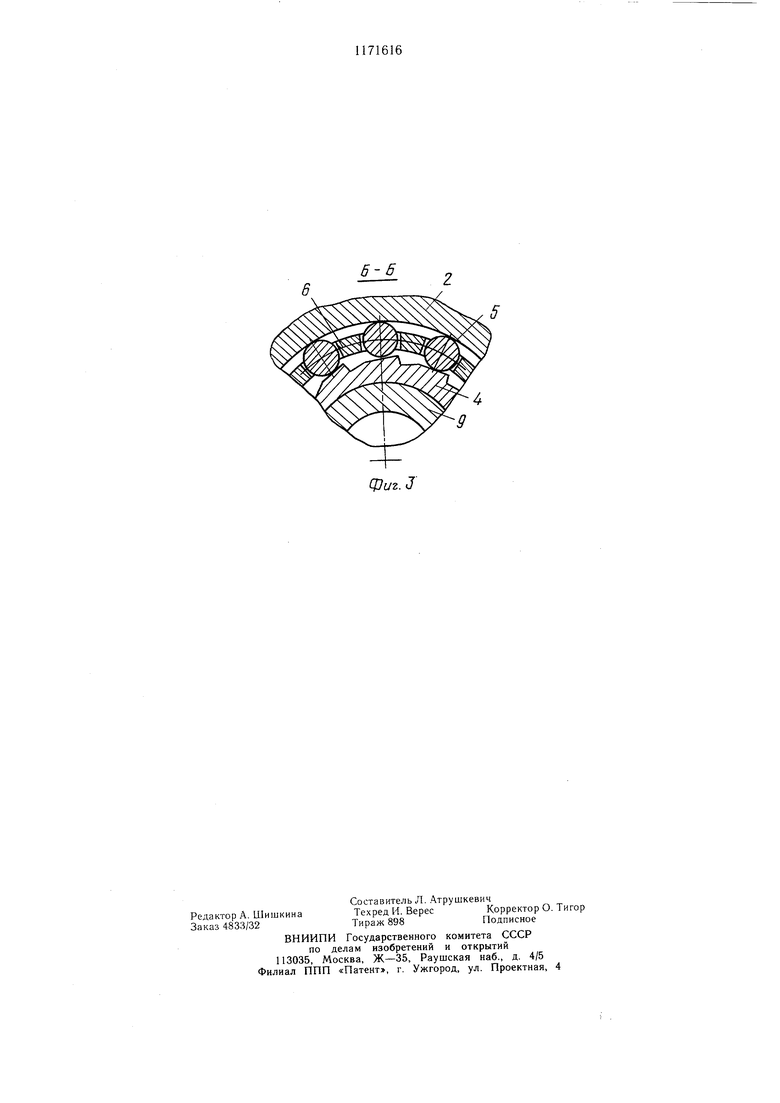
МЕХАНИЗМ СВОБОДНОГО ХОДА, содержащий обойму, расположенную в ней звездочку, тела заклинивания, размещенные в сепараторе между звездочкой и обоймой, храповое колесо, взаимодействующее с собачками, контактирующими с упругими упорами,и фрикционное тормозное устройство, отличающийся тем, что, с целью повыщения надежности путем уменьщения угла относительного поворота силовых элементов муфты до их полного сцепления, он снабжен шлицевой втулкой, на шлицах которой установлена с возможностью ограниченного поворота звездочка, собачки смонтированы на звездочке и подпружинены к установленным на втулке упругим упорам, а тормозное устройство расположено между обоймой и храповым колесом.
6-6
4
. J
| Муфта свободного хода | 1975 |
|
SU826122A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Механизм свободного хода | 1974 |
|
SU489891A2 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
