1
Изобретение относится к области машиностроепия и может быть использаваио в агрегатах, iK экоплуатационной .надежности которых предъявляются тювышенные требования.
Известен механизм свободного хода, содержащий звездочку, обойму, заклинивающие тела качения, размещенные в сепараторе, на котором установлены собачки, взайаюдействующие с храповым колесом внутреннего зацепления, которое установлено iB кольцевом пазу, |Вьтолнбнном в обойме, л онабл :ено торцовыми выступами, размещенными и .подпружиненными в дугообразных выемках, имеющихся в обойме.
Однако такой механиз:М имеет ограниченную возможность применения, т. к. собачки проскальзывают по зубьям храпового колеса, не имея надежного контакта с «ими.
Отличительная особенность описываемого механизма свободного хода заключается в том, что он снабжен подпружиненными рычага.ми, установленными на звездочке и подвижно связанными с собачками, а в обойме установлены кольца, прижимаемые в осевом направлеи1ии пружиной к торцам тел заклипива«пя.
Такое .выполнение позволяет повысить .надежность включения собачек и всего механизма В целом.
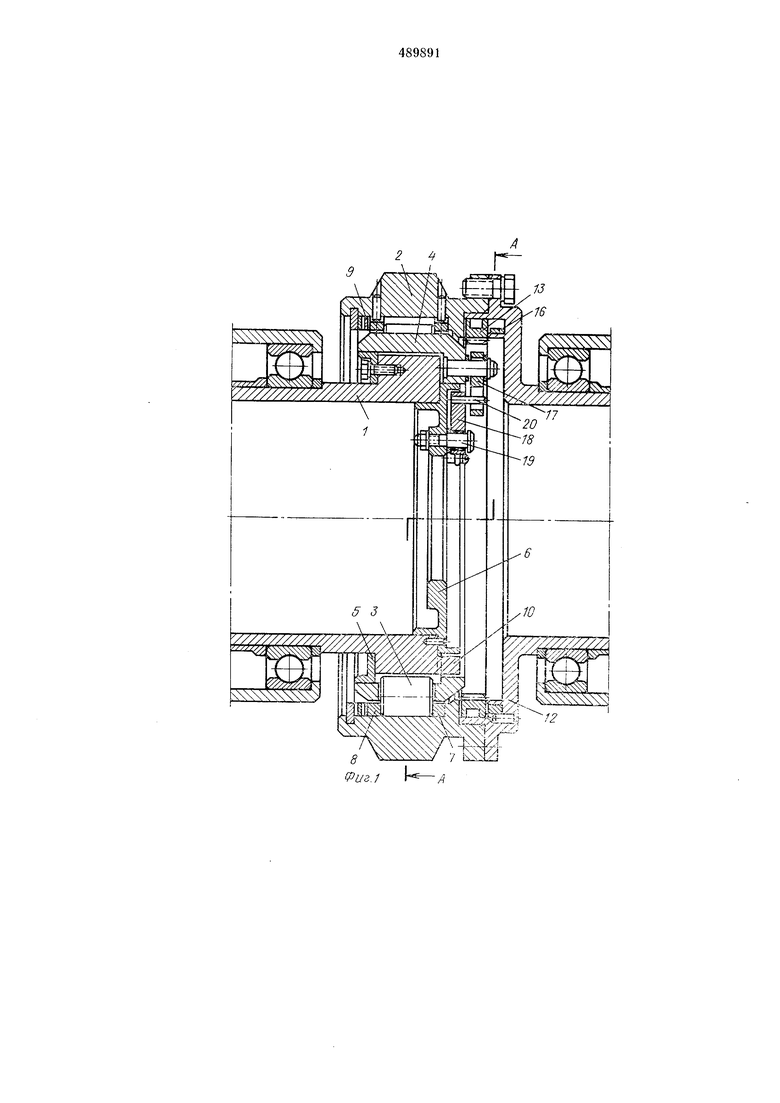
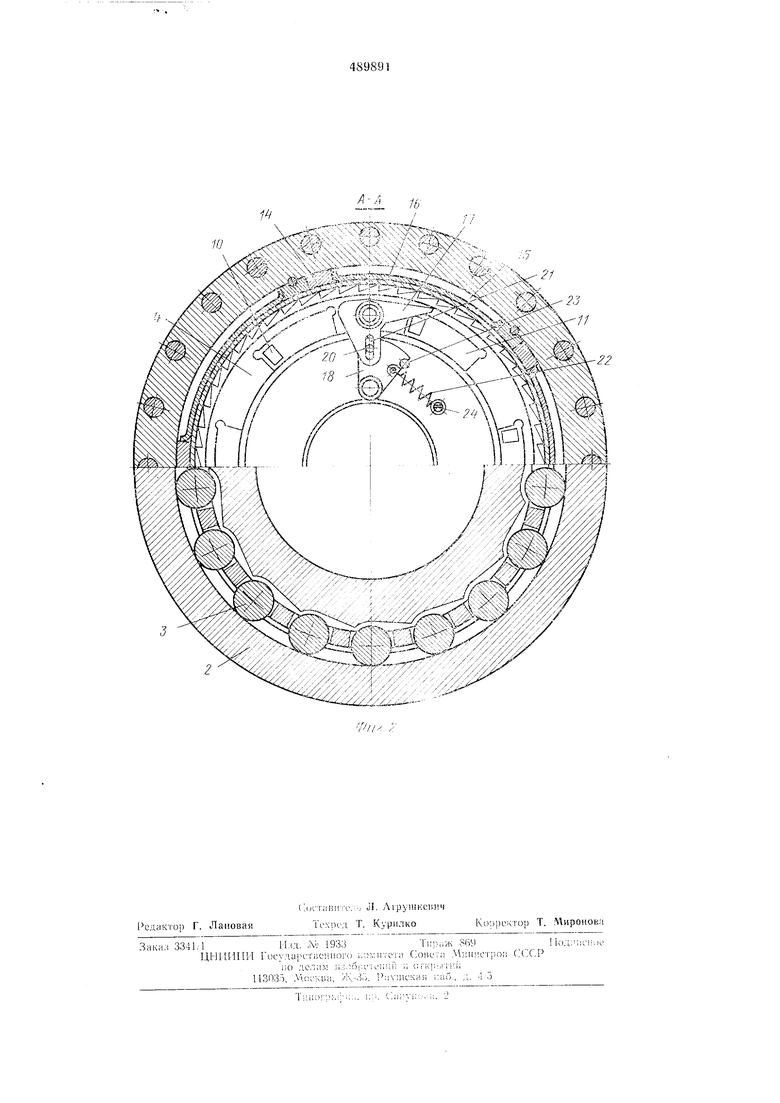
На фиг. 1 показан осевой разрез механизма; на фиг. 2 - разрез по А-А па фиг. 1.
Мехаппзм свободного хода состоит из концентрично расположенных звездочки 1, обоймы 2, тел заКлипн.вания IB виде роликов 3, находящпхся в окнах сепаратора 4. Сепаратор центрируется относительно звездочки по наружным диаметрам ко.тец 5 и 6, закрепленных па звездочке неподвижно. Сепаратор через роликн фрикционно связан с обоймой 2, в которой уста.новлеиы два Кольца: упорное 7 и нажимное 8, прижимаемые к торцам роликов плоскимн пружинамп 9.
Угловое перемещение сепаратора 4 относительно звездочки 1 ограничено имеющимися па ней выступами 10, входящпми в пазы 11 на сепараторе. Обойма 2 соединена с фланцем 12, в котором .имеется кольцевая проточка. В ней установлено с возможностью углового перемещения храповое 1колесо 13 внутреннего зацепления, имеющее выступы 14, которые 1ВХОДЯТ в дугообразные пазы 15 на флапце 12. В эти пазы 15 заложены упругие
элементы 16, воздейетвую.щие на выступы 14 и .ноджимающне храповое колесо к торцу дугообразного паза 15 в направленнн против вращения звездочки прп заклннпваннп.
На сенараторе 4 установлены трп .поворотныс собачки, сбалансированные относительно
осей 11 для уменьшения влияния центробежных сил на работу храпового механизма.
Собачки 17 связаны со звездочкой 1 рычагами 18, устаиовлбнными на осях 19, закрепленных на кольце 6, и имеющими штифты 20, входящие в Направляющие назы 21, выполнен1ные в собачках. Рычаги 18 с помощью пружин 22 прижимаются к ограничительным унорам 23, закренлен.ным на торце кольца 6. Пружины 22 прикреплены к кольцу 6 винтами 24. Взаи1М Ное расположение штифтов 20, ограничительных уноров 23, собачек 17, сепаратора 4 и звездочки 1 отрегулировано так, чтобы iB исходном положении собачки 17 были Вьиведены из зацепления с зубьями храпового колеса 13, а рычаги 18 прижимались к ограничительным упорам 23.
Механизм свободного хода работает следующим образом.
При вращении авездочки 1 сенаратор 4 с роликами 3 под действием фрикционных сил остается неподвижным вместе с обоймой 2. В результате углового неремещения звездочки 1 относительно сепаратора 4 и взаимодействия собачек 17 со штифтами 20 происходит поворот собачек до зацепления с зубьями храпового колеса 13. TaiK как дальнейший поворот собачек невозможен, то при продолжающемся угловом перемещении звезодчки усилие, возникающее в храновом зацеплепии, передается сепаратору, и ои перемещается отиосительно звездочки и обоймы. При этом рычаги 18, взаимодействующие с собачками 17,
поворачиваются на осях 19, преодолевая усилие пружин 22, до тех пор, пока «е произойдет заклииивание роликов 3 и относительное неремещение сепаратора 4 нрекратится. В период заклинивания и при работе муфты собачки находятся в зацеплении с зубьям; храпового колеса, поэтому на ролики со стороны сепаратора действуют иостоянно нрижимные усилия. После выключения муфты
или в режиме свободного хода сепаратор под действием фрикционных сил, возникающих местах контакта торцов роликов с кольцами 7 и 8, поворачивается до упора в выступы 10 на звездочке. Одновременно под действиел
пружин 22 рычаги 18 возвращаются в исходное положение и прижимаются к ограничительным упорам 23. Собачки 17, взаимодействуя со штифтами 20 рычагов 18, новорачиваются на осях и выходят из заценлеиия с зубьями храпового колеса.
Предмет изобретения
Мехаппз.м свободного хода по авт. св. N° 432310, отличающийся тем, что, с целью повыщения надежности включения собачек, он снабжен поднружиненными рычагами, установленными иа звездочке и подвижно связанными с собачками, а в обойме установлены Кольца, прижимаемые в осевом иаправленин :пружиной к торцам тел заклинивания.
W Фиг.1 А
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1972 |
|
SU432310A1 |
| Механизм свободного хода | 1983 |
|
SU1171616A1 |
| Коробка передач | 1983 |
|
SU1191656A1 |
| НАЖИМНОЕ УСТРОЙСТВО ПЕРЕКЛЮЧЕНИЯ СКОРОСТЕЙ ВЕЛОСИПЕДА | 2011 |
|
RU2463195C1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ ВЕЛОСИПЕДОВ | 2000 |
|
RU2242397C2 |
| Устройство для приведения кругловязальной машины в положение,соответствующее началу вязания изделия | 1985 |
|
SU1339173A1 |
| Реверсивный храповой механизм | 1985 |
|
SU1499016A1 |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2002 |
|
RU2221943C2 |
| Реверсивный храповой механизм | 1986 |
|
SU1366746A1 |