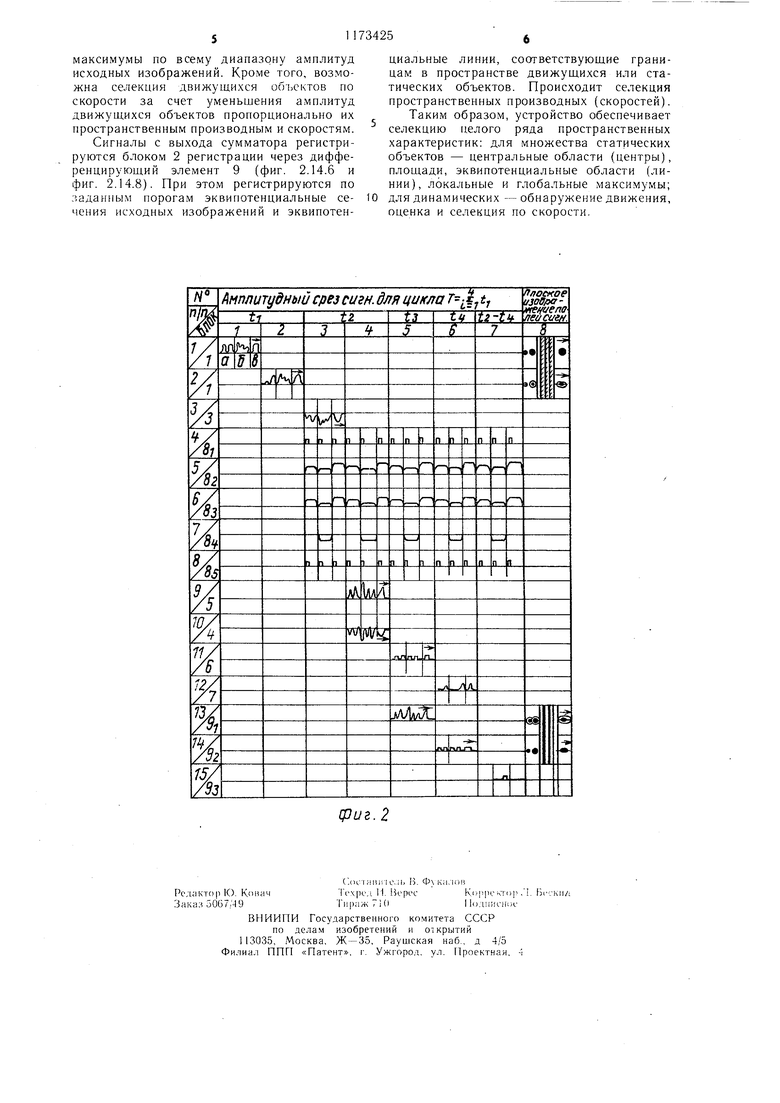
Изобретение относится к автоматике аналоговой вычислительной техники, в частности к электронным моделирующим устройствам для оценок пиковых значений, интерполяции и скоростей для принятия оптимальных решений по контролю и управлению, и может быть использовано при проведении различных исследований, технологи ческом контроле, испытаниях, регулировке узлов и изделий, где требуется решать задачи моделирования,селекции и оценивания в псевдореальном и реальном масштабах времени. Цель изобретения - расширение функциональных возможностей за счет определения эквипотенциальных амплитудных сечений и экстремумов. На фиг. 1 показана схема предлагаемого устройства; на фиг. 2 - временные диаграммы. Устройство содержит фотоэлектронный преобразователь 1, блок 2 регистрации, инвертор 3, усилитель-ограничитель 4 сверху, усилитель-ограничитель 5 снизу, сумматор 6, дискриминатор 7 амплитуды и блок 8 управления, при этом блок 2 регистрации содержит дифференцируюший элемент 9 и три видеоиндикатора 10. На фиг. 2 показана диаграмма работы предлагаемого устройства: поз. 1.1; а - для отдельных объектов разной площади; поз 1.1 б -- для непрерывного поля амплитуды; поз. 1.1 в - для движущегося точечного объекта. Ноказаны амплитудные сечения сигналов с плоскими изображения ми объектов на входе и выходах. Стрелкой показано направление движущегося точечного объекта. Блок 8 управления выполнен в виде трех мультивибраторов с регулируемыми амплитудами и генератора синхроимпульсов. Нри обработке статических или условностатических объектов устройство позволяет выделить пространственные центры, в том числе центры тяжести ряда объектов, оценки площадей и дисперсий точечных совокуп ностей, эквипотенциальных амплитудных сечений, локальных и глобальных амплитудных максимумов. Для движущихся объектов - это обнаружение движения и оценка (с селекцией) скорости объектов. Все эти выделяемые характеристики при пространственно-временном моделировании исходных статистических совокупностей позволяют не только выделять моменты статистических рас пределений, пространственные интегральные оценки, пространственные производные соответственно статических, условно-статических и динамических объектов, но и дают возможность существенно устранять из быточность, отстраиваясь от неинформативных параметров. Рассмотрим основные преобразования, осуществляемые устройством. Как известно, мишень телевизионноцй передающей трубки функционально эквивалентна нейронной среде, определяемой как однородная непрерывная линейная среда, реагирующая на возмущение, прилагаемое в т. Хо и УО, и моделируемой пространственно-временны.м интегралом свертки и(х, у, t) П Ь (X, Y, t)q (х-х„, y-Yc, t-to)dxodYodt,,(1) где q - весовая функция, характеризующая связи в плоскости поля изображения. Весовые функции определяются видом ста тистического моделирования и выделения соответствующих детекторов кривизны, углов, ориентированных прямых, движущихся границ, контуров. При этом в ряде случаев весовая функция может быть интерпретирована с помощью функции плотности вероятности распределения статистических параметров распознавания классов изображаемых ситуаций. Вид функции определяется различными апертурами, моделирующими входные изображения оптически (например, с помощью слайдов) и электронным путем (с помощью специальных электронных генераторов управления считывающим лучем). В частности, реализовать достаточную универсальную функцию расфокусировки исходного изображения можно простой регулировкой резкости объектива телекамеры, а также с помощью синусоидального генератора в видеоконной телекамере или путем регулировки потенциалов фотокатода, мишени, ускоряющего электрода в суперортиконной телекамере (расфокусировка за счет электронной вторичной эмиссии). Изображение в передающей телекамере формируется на базе исходного за счет основного интегрального преобразования согласно формуле (1). В устройстве осуществляются следующие существенные пространственно-амплитудные преобразования сигналов изображений исходных статистических совокупностей. Сигналы равномерно по плоскости изображения расфокусируются моделирующим фотоэлектронным преобразователем 1 (телекамерой). При этом имеющаяся в некоторых промышленных передающих телекамерах неравномерность по краям растра может быть устранена соответствующим (до 20-30% площади) ограничением обзора поля исходного изображения. Величина расфокусировки определяется информацией о характере непрерывных или точечных исходных объектов, их площади, интенсивности излучения, статике или динамике движения. Это позволяет выделить амплитудные максимумы различных непрерывных фигур и точечных совокупностей их составляющих. При этом моделируется пространственновременной интеграл свертки или функционально эквивалентное ему дифференциальное инерционно-иррадиационное преобразование. Соответствующие разнополярные ограничения сформированных сигналов, их инвертирование, суммирование, дискриминация амплитуды позволяют выделить из них следующие сигналы: Сигналы местоположения и амплитуды пространственных центров полей расфокусированных изображений статических, условно статических объектов (после усилителя-ограничителя 5 снизу). Это соответствует, в частности, таким важнейщим статистическим характеристикам, как центр тяжести, математическое ожидание (оцениваемые по координатам положения амплитудного максимума) и дисперсия (оцениваемая по амплитуде цент рального максимума), расфокусированной от точечной совокупности. Селекция амплитуд сигналов позволяет при закрытом пороговым уровне усилителя 4 выделять уровни дисперсий точечных совокупностей, площадей нормированных по интенсивности входного излучения объектов. Для движущихся объектов за счет уменьшения амплитуд следов пропорционально их скорости происходит после дискриминатора 7 при закрытом порогом узле 4 селекция объектов по скоСигналы местоположения уровней, заданных порогами ограничения усилителей 4 и 5, просуммированных сумматором 6 и дифференцирующим элементом 9, характери зуют эквипотенциальные границы областей рельефов исходных изображений полей непрерывным изменением яркости. При этом сигналы, прощедщие усиление и ограничение в усилителях 4 и 5, после сумматора 6 имеют (каждый) крутой не экспоненциальный фронт, что необходимо для их надежного разнополярного диференцирования. При дифференцировании сигналов движущихся объектов передний фронт, совпадающий с направлением движения, существенно круче заднего, т. е. после элемента 9 можно фиксировать не только факт движения, но и объекты с определенным направлением движения. Противоположное направление движения фиксируется по сигналу дифференцирования обратной полярности. Последовательно выделяемые за счет изменения порогов усилителей 4 и 5 сигналы местоположения верщин потенциальных уров ней характеризуют селекцию вначале локальных, а затем глобального максимумов после суммирования в сумматоре 6 и селекции в дискриминаторе 7 для статических и услов1Ю-статических полей или решетчатых функций исходных изображений сигналов различных амплитуд. Устройство по фиг. 1 и 2 работает следующим образом. Исходное оптическое изображение (фиг. 2.1.8) и условные амплитудные срезы (фиг. 2.1.1) по сигналу с выхода блока 8 управления (фиг. 2.4.2) поступают на преобразователь 1, который формирует видеоимпульсы (фиг. 2.2.2) кадра расфокусированного изображения (фиг. 2.2.8). Затем ciii-нал поступает к усилителю-ограничителю 5 снизу и инвертору 3, с выхода которого (фиг. 2.3.3) поступает на усилитель-ограничитель 4 сверху. По сигналам с выходов блока 8 управления задаются уровни ограничения сигналов. При этом в инверторе 3 усилителе-ограничителе 4 сверху задержка сигнала выбирается равной задержке в усилителе-ограничителе 5 снизу, и.меющем порог ограничения по модулю меньщий, чем в усилителе 4. -С выхода усилителя-ограничителя 5 (фиг. 2.9.4) и выхода усилителя-ограничителя 4 (фиг. 2.10.4) по разному ограниченные, но одновременно одинаково усиленные по модулю сигналы поступают на выходы сумматора 6, с выхода которого (фиг. 2.11.5) поступают на вход дискриминатора 7, на управляюп.1ий вход которого с выхода блока 8 (фиг. 2.7.3) подан порог, причем дискриминатор 7 пропускает только сигналы ниже этого порога. Сигналы с выхода усилителя-ограничителя 5 снизу поступают на вход блока 2 регистраци -;. который по сигналу с выхода блока 8 управления (фиг. 2.8.5) регистрирует амплитудные максимумы пространственных центральных областей статических объектов, определяющих моменты статистических распределений их совокупностей (фиг. 2.13.5 и 2.13.8). Для статистического «облака точечных аргументов это математическое ожидание. Для плоских однородных по яркости и структуре односвязных объектов выделяются центры тяжести. По амплитуде пространственных центральных максимумов оцениваются площади объектов, для точечных совокупностей дисперсии. Последовательно выставляя пороги усилителей 4 и 5 и дискриминатора 7, от минимума к минимуму можно фиксировать уровни дисперсии с выхода дискриминатора 7 по входу блока 2 регистрации. В то же время для полей сигналов (фиг. 2.1.16) варьируя порог ограничения в усилителе 5 (фиг. 2.6.3), регистрируются локальные амплитудные максимумы (фиг. 2.15.7 и 2.15.8). При этом поступивщие с выхода сумматора (фиг. 2.11.6) на вход дискриминатора 7 сигналы в соответствии с управляющим пороговым сигналом с блока 8 управления (фиг. 2.8.6) селективно пропускаются. Причем проходят на выход только те сигналы, которые MeHbiLie заданного порога (фиг. 2.15.7), что характеризует появление максимумов сигналов, регистрируемых с выхода амплитудного дискриминатора 7 по сигналу блока 8 управления блоков 2 регистрации (фиг. 2.15.7 и 2.15.8). Варьируя пороги, ограничения, можно выделять локальные и глобальные
максимумы по всему диапазону амплитуд исходных изображений. Кро.ме того, возможна селекция движущихся ооьектов по скорости за счет уменьшения амплитуд движущихся объектов пропорционально их пространственным производным и скоростям. Сигналы с выхода сумматора регистрируются блоком 2 регистрации через дифференцирующий элемент 9 (фиг. 2.14.6 и фиг. 2.14.8). При этом регистрируются по заданным порогам эквипотенциальные сечения исходных изображений и эквипотенциальные линии, соответствующие границам в пространстве движущихся или статических объектов. Происходит селекция пространственных производных (скоростей). Таким образом, устройство обеспечивает селекцию пелого ряда пространственных характеристик: для множества статических объектов - центральные области (центры), площади, эквипотенциальные области (линии), локальные и глобальные максимумы; для динамических - обнаружение движения, оценка и селекция по скорости.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки изображений для моделирования и оценки связности статистических объектов | 1986 |
|
SU1372342A1 |
| СПОСОБ ДИАГНОСТИКИ ФОРМООБРАЗОВАНИЯ ПРИ СВАРКЕ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2127177C1 |
| Устройство для регистрации подвижных объектов в зависимости от скорости движения | 1975 |
|
SU550669A1 |
| СПОСОБ РЕГИСТРАЦИИ СЛАБЫХ СВЕТОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2190196C1 |
| Способ контроля связности объекта | 1985 |
|
SU1392362A1 |
| СПОСОБ АДАПТИВНОГО ОБНАРУЖЕНИЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2144217C1 |
| ОДНОФОТОННЫЙ ПРИЕМНИК ДЛЯ ПРОСТРАНСТВЕННО-ВРЕМЕННОГО ПОИСКА ОПТИЧЕСКИХ ИМПУЛЬСНЫХ СИГНАЛОВ | 2014 |
|
RU2568939C2 |
| Устройство для считывания цветных графических изображений | 1981 |
|
SU1257676A1 |
| Двухканальное устройство подавления помех | 1989 |
|
SU1619415A1 |
| Устройство фильтрации импульсных помех на изображении (его варианты) | 1981 |
|
SU1042205A1 |
УСТРОЙСТВО ДЛЯ МОДЕЛИРО ВАНИЯ И ОЦЕНКИ СТАТИСТИЧЕСКИХ ПАРАМЕТРОВ, содержащее фотоэлектронный преобразователь, блок регистрации, выполненный в виде трех видеоиндикаторов и дифференцирующего элемента, выход которого соединен с сигнальным входом первого видеоиндикатора, блок управления, выполненный в виде трех мультивибраторов и генератора синхроимпульсов, выход которого соединен с синхронизирующими входами мультивибраторов, видеоиндикаторов и фотоэлектронного преобразователя, отличающееся тем, что, с целью расширения функциональных возможностей за счет определения эквипотенциальных амплитудных сечений и экстремумов, он дополнительно содержит дискриминатор амплитуды, сумматор, инвертор, усилитель-ограничитель сверху и усилитель-ограничитель снизу, выход фотоэлектронного преобразователя соединен с сигнальным входом усилителя-ограничителя снизу и входом инвертора, выход которого подключен к сигнальному входу усилителя-ограничителя сверху, выход которого соединен с первым входом сумматора, второй вход которого подключен к выходу усилителя-ограничителя снизу и сигнальному входу второго видеоиндикатора, выход сумматора соединен с входом дифференцирую(g щего элемента и сигнальным входом дискри(Л минатора амплитуды, выход которого соединен с сигнальным входом третьего видео индикатора, управляющие входы усилителяограничителя сверху, усилителя-ограничителя снизу и дискриминатора амплитуды под ключены соответственно к выходам первого, второго и третьего мультивибраторов блока управления. П со ю сд
| Устройство для регистрации подвижных объектов в зависимости от скорости движения | 1975 |
|
SU550669A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| СПОСОБ УМЕНЬШЕНИЯ ИЗБЫТОЧНОЙ ПЛОЩАДИ ИЗОБРАЖЕНИЯ | 0 |
|
SU374638A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
