Изобретение относится к средствам поиска и обнаружения различных объектов по их оптическому, в том числе инфракрасному, излучению и может использоваться в системах определения направления, положения и других информативных характеристик при спасении, охране, дальнем поиске и распознавании.
Известен способ адаптивного обнаружения объектов по патенту Японии 4-80329 G 01 J 1/02,5/02,608 B 13/18,194, в котором исходное излучение разбивают на отдельные потоки различным рефлекторным отражением, преобразуют их в электрические сигналы, обрабатывают, обеспечивая обнаружение и индикацию направления на объект. Ограничением такого решения является отсутствие пространственного слежения, оценок геометрии, динамики, вероятностных характеристик и обнаружения по ним.
Известен способ адаптивного обнаружения объектов по патенту PCT(WO) 94/17480 G 01 V9/04, в котором исходное излучение разбивают на отдельные потоки различным рефлекторным отражением, преобразуют их в электрические сигналы, обрабатывают, обеспечивая обнаружение и индикацию направления на объект. Ограничением такого решения является отсутствие пространственного слежения, оценок геометрии, динамики, вероятностных характеристик и обнаружения по ним.
Известен способ адаптивного обнаружения объектов по авторскому свидетельству 1827551 G 01 J 5/00, в котором оптически формируют сигналы анализируемого излучения и последовательными электрическими аналоговыми преобразованиями определяют координаты направления, положение энергетического центра, диаметр пятна потока излучения. Ограничением такого решения является отсутствие амплитудного слежения, оценок динамики, вероятностных характеристик и обнаружения по ним.
Известен способ адаптивного обнаружения объектов по научно-технической информации "Нулевой радиометр ИК диапазона" из журнала "Приборы и техника эксперимента", N 4, 1992 г., в котором исходное и вспомогательное излучения оптически формируют, спектрально фильтруют, преобразуют в электрические сигналы, сравнивают и изменяют в результате сравнения усиление преобразуемых электрических сигналов, причем вспомогательное излучение оптически формируют непрерывным нагревом и охлаждением, исходное или вспомогательное излучение попеременно; спектрально фильтруют, оптически рефлекторно формируют, преобразовывают в электрические сигналы. Этот способ выбран в качестве ближайшего аналога. Ограничением такого решения является отсутствие пространственного слежения, оценок геометрии, динамики, вероятностных характеристик и обнаружения по ним.
Известно устройство адаптивного обнаружения объектов по научно-технической информации "Нулевой радиометр ИК диапазона" из журнала "Приборы и техника эксперимента", N 4, 1992 г., содержащее входной блок, оптический блок, блок спектральной фильтрации, операционный блок и связанные с ним излучатель, расположенные по ходу оптического излучения блок пропускания излучения и сенсорный блок, причем между ним и блоком спектральной фильтрации расположен рефлекторный оптический блок. Это устройство выбрано в качестве ближайшего аналога. Отсутствие пространственного слежения и информативных оценок положения, геометрии, движения, амплитуды и вероятности для обнаружения различных объектов ограничивает возможности устройства.
В основу изобретения поставлена задача усовершенствования способа адаптивного обнаружения объектов, в котором благодаря изменению приемов, операций, условий поиска и анализа исходных объектов обеспечивается получение следующего технического результата. Для различных условий применения при соответственно высоких требованиях к чувствительности и надежности обеспечивают не только нуль-компенсационное амплитудное слежение с электронной регулировкой чувствительности, но и существенно более эффективно адаптивно управляют рефлекторной оптической чувствительностью, учитывают спектральной фильтрацией и программной обработкой неизвестную, изменяющуюся излучательную способность объекта и потери поглощения пропускающей среды, обеспечивают адаптивное слежение за направлением и дальностью, представляют информативные данные (центральные области; оценки амплитуды, дальности, расстояния между объектами, вероятности скорости и ее изменений, направления движения) для обнаружения точечных и сводящихся к ним объектов, а также информативные данные (вышеперечисленные признаки точечных объектов; геометрические оценки ориентации, площади, связности, размеров, конфигурации; эквипотенциалей, градиенты, экстремумы многоградационных полей и сигналов; узлы сети и изменения траектории) обнаружения неточечных объектов.
В основу изобретения поставлена также задача усовершенствования устройства для осуществления способа адаптивного обнаружения объектов путем введения новых элементов и их связей, что обеспечивает получение следующего технического результата. Значительно повышается надежность амплитудного слежения за счет большего быстродействия (одновременное преобразование основного и вспомогательного излучений) и более совершенной рефлекторной оптико-электронной адаптации к направлению, дальности, излучающей способности и поглощению пропускающей средой. Совместно с усовершенствованием пространственно-амплитудного слежения в реальном времени адаптивного поиска выделяются, формируются для различных задач адаптивного обнаружения информативные оценки амплитуд, движения, положения, геометрии, вероятности точечных или сводящихся к ним, а также неточечных объектов.
Поставленная задача решается тем, что в способе адаптивного обнаружения объектов, заключающемся в том, что исходное и вспомогательное излучение оптически формируют, спектрально фильтруют, преобразуют в электрические сигналы, сравнивают и изменяют по результатам сравнения усиление преобразуемых электрических сигналов, задают значения исходного и вспомогательного излучений тестирования и эталонные характеристики, используют их в настройке, обучении, самодиагностике и обработке сигналов, исходное и вспомогательное излучения преобразуют одновременно и оптически рефлекторно, регулируют оптическую чувствительность изменением площади или/и формы рефлекторной поверхности, управляют пропусканием излучений областей пространственно, в плоскости обзора, спектрально с учетом поглощения пропускающей среды оценивают излучательную способность объекта и корректируют по ней его амплитуду, направление излучения объектов индицируют и ориентируют рефлекторную поверхность по пространственному положению сигналов объектов и координатам их оценок, формируют рефлекторную поверхность и по увеличению, обострению амплитуды полученных сигналов определяют дальность, статически моделируют плоские объекты, при этом сигналы пространственно накапливают, размывают, размытые максимумы выделяют из неинформативного, сигналы размытых максимумов центральных, скелетных областей, амплитуды которых больше пороговых, выделяют, нормируют амплитуды и расфокусируют или динамически с движущимися областями задания сигналов моделируют точечные объекты, выделяют и в фиксированный момент времени оценивают относительно неподвижных значения скоростей движения, по изменениям площадей следов и длительностей фронтов размытых максимумов, нормируют амплитуды и регулируют направление анизотропии или полосовой фильтрации и расфокусируют или динамически моделируют точечные объекты, их сигналы размытых максимумов информативного направления движения, у которых амплитуды больше пороговой и наиболее крутые фронты навстречу движению, выделяют, нормируют и негативно преобразуют амплитуды, регулируют направление полосовой фильтрации и расфокусируют или статически моделируют односвязные плоские или точечные объекты, сигналы размытых максимумов расстояний между объектами выделяют по амплитудам с размытыми передним, задним фронтами и в фиксированный момент времени оценивают, нормируют амплитуды и расфокусируют или статически моделируют точечные объекты, по координатам размытых максимумов их совокупностей определяют математические ожидания, а по амплитудам - дисперсию, нормируют амплитуды и расфокусируют или статически моделируют плоские объекты, амплитудами сигналов их размытых максимумов в фиксированный момент времени оценивают площади объектов, непосредственно из исходного многоградационного излучения или из разности его с сигналами его расфокусировки или статического моделирования выделяют амплитуды сигналов градиентов и экстремумов, нормируют по амплитуде и сечению, расфокусируют или статически моделируют изображение сети, выделяют пропорциональные числу путей амплитуды размытых максимумов узлов сети, нормируют по амплитуде и сечению, расфокусируют или статически моделируют изображения сканируемого участка траектории, выделяют и в фиксированный момент времени оценивают относительно неизменного увеличение амплитуды размытого максимума, пропорциональной изменению направления траектории, перекрывают нормированный по амплитуде центрированный плоский объект вращаемой центрированной маской эталона, электрически нулевым совпадением обнаруживают соответствующую эталону конфигурацию, а ее ориентацию - углом совпадения, нормируют, негативно преобразовывают амплитуды и расфокусируют или статически моделируют плоские объекты, выделяют или в фиксированный момент времени оценивают пропорциональные площадям замкнутых внутренних областей амплитуды размытых максимумов сигналов связности, меньших фоновых амплитуд, нормируют амплитуды и площади, регулируют направление анизотропии или полосовой фильтрации и расфокусируют или статически моделируют плоские односвязные объекты, выделяют амплитуды их размытых максимумов сигналов ориентации уровнями, большими пороговых, нормируют амплитуду, накладывают центрированные относительно центрированного известной ориентации плоского объекта маски соответствующих конфигурации ориентаций, расфокусируют или статически моделируют изображение, выделяют и в фиксированные моменты времени оценивают амплитуды пропущенных масками размытых максимумов размеров, сравнивают полученные из исходных излучений и эталонные характеристики пространственно-амплитудного слежения, вероятности, градиентов и экстремумов, оценок конфигураций, площадей, движения, расстояний, связности, ориентации, размеров, узлов сети, изменений направления траекторий, по результатам сравнений обнаруживают информативные точечные или сводящиеся к ним и неточечные объекты.
Поток вспомогательного излучения формируют в центре исходного излучения коаксиально ему.
Преобразование исходного излучения осуществляют периодической подачей на центральные чувствительные элементы пироэлектрических приемников сенсорной структуры вспомогательного гетеродинного излучения с первого излучателя.
Поставленная задача решается также тем, что в устройстве для адаптивного обнаружения объектов, содержащее входной блок, оптический блок, блок спектральной фильтрации, операционный блок, и электрически связанные с ним излучатель, расположенные по ходу оптического излучения блок пропускания излучения, и сенсорный блок, согласно изобретению дополнительно введены электрически подключенные к операционному блоку сориентированный на оптический блок второй излучатель, сориентированный на центральную область входного блока - третий излучатель и механически соединенный с оптическим блоком блок привода, связанный электрически с операционным блоком, с которым также электрически связан входной блок, а расположенный между блоком пропускания излучения и сенсорным блоком блок спектральной фильтрации связан электрически с операционным блоком.
Первый излучатель сориентирован через центральные области блока пропускания излучения, блока спектральной фильтрации на центр сенсорного блока, а второй излучатель сориентирован на периферийную область оптического блока.
Первый излучатель, блок пропускания излучения, блок спектральной фильтрации и сенсорный блок объединены в единую полупроводниковую структуру.
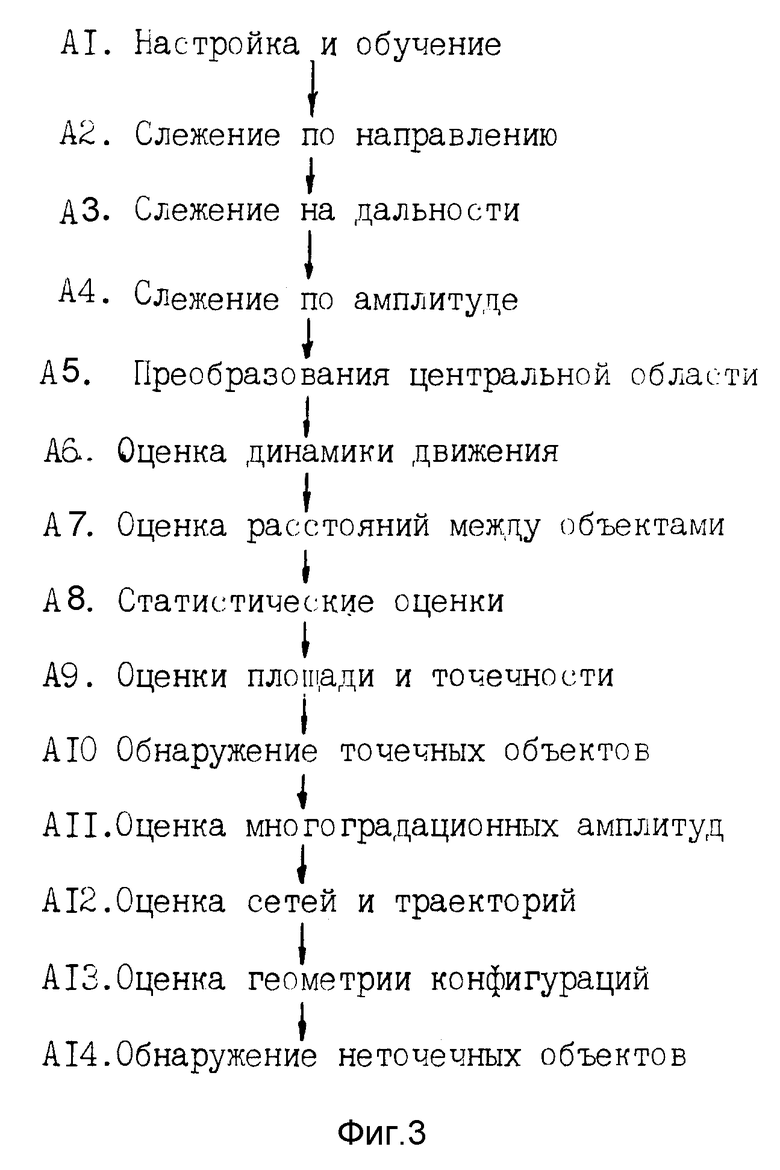
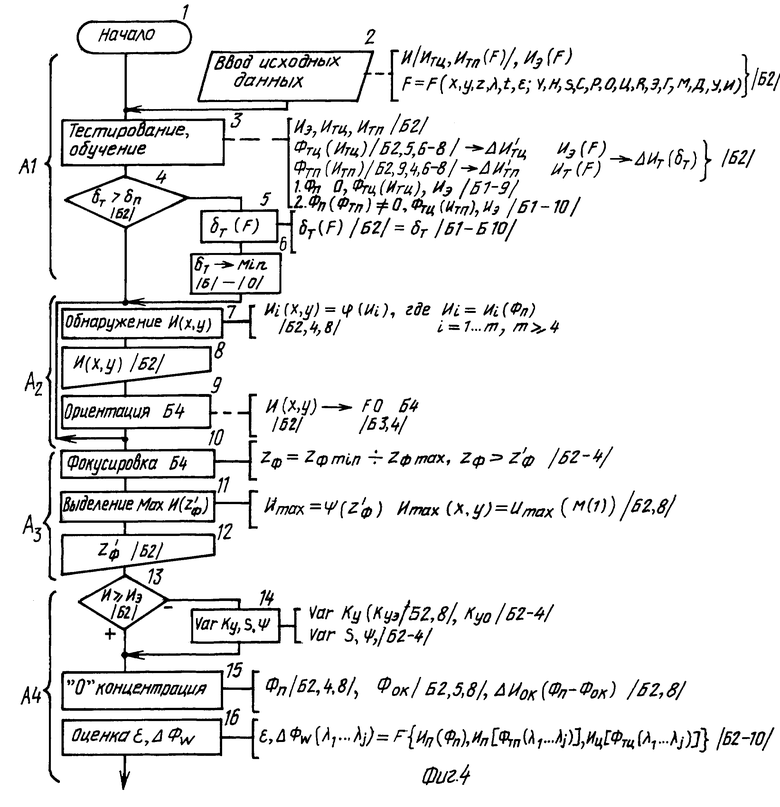
Изобретение поясняется чертежами на фиг. 1-6, где фиг. 1,2 - варианты блок-схемы заявленного устройства (ввиду отсутствия принципиальных отличий описание будет дано для первого варианта по фиг. 1); фиг. 3 - последовательность основных информационных преобразований; Фиг.4 - алгоритмы начальных преобразований, пространственного и амплитудного слежения; фиг.5 - алгоритмы выделения центральных областей, характеристик движения, расстояния, вероятности, площади при обнаружении точечных и сводящихся к ним объектов; фиг.6 - алгоритмы выделения характеристик многоградационных амплитуд, оценок сетей, траекторий, геометрии конфигураций при обнаружении неточечных объектов.
В устройстве по фиг.1 входной блок 1 соединен по управляющему входу с операционным блоком 2 и выполняет функции управляемого перекрытия входного излучения на время тестирования и на время отдельных этапов обработки сигналов, защиты от внешней среды, а также экранирования входного излучения от посторонних засветок.
Операционный блок 2 подключен электрически по выходам к блоку привода 3, механически соединенному с оптическим блоком 4, к первому излучателю 5, к блоку пространственного пропускания 6, к блоку спектральной фильтрации 7, к сенсорному блоку 8, ко второму излучателю 10, а по входам - к блокам 7 и 8. Он реализуется на основе компьютера с аналого-цифровым преобразователем на входе и цифроаналоговыми преобразователями на выходах. В конкретных специализированных применениях возможна микропроцессорная или аналоговая реализация. Обеспечивающиеся программно и связями с блоками 1,3,5-10 функции блока 2 согласно фиг. 3-6 состоят в следующих преобразованиях: исходных настройки и обучения; пространственного слежения по направлению и дальности; слежения по амплитуде с учетом чувствительности, калибровки, оценки излучающей способности объекта и потерь поглощения пропускающей среды; обнаружения видов точечных и неточечных объектов по их оценкам F преимущественно на основе далее рассматриваемых базовых модельных преобразований.
Важнейшим для формирования оценок обнаружения исходных объектов (точечных, одно-, двух- и трехмерных, в основном путем сведения трехмерных к двухмерным сечениям; бинарных и многоградационных; статических и движущихся; целого ряда различных характеристик площади, геометрии и др.) инвариантно к масштабу, положению в поле изображения контрастного (позитивного или негативного) фона, являются условно статическая модель вида
с областью задания, статической, квазистатической (статической на время быстродействующей реализации этого преобразования), с коэффициентом преобразования k исходного E(x,y) в И(x,y); и динамическая модель вида
с движущейся областью задания и проекциями векторов скоростей Vx на горизонтальную ось X и Vy на вертикальную ось Y.
Однозначность базовых моделей (1) и (2), для краткости в дальнейшем - М(1) и М(2), определяется начальными условиями Uo=E(x,y) и граничными условиями  Область задания должна быть непрерывной, изотропной и стационарной, с независимостью физических свойств моделирующей среды области задания от коэффициентов а и b в границах xo-xг, yo-yг.
Область задания должна быть непрерывной, изотропной и стационарной, с независимостью физических свойств моделирующей среды области задания от коэффициентов а и b в границах xo-xг, yo-yг.
М(1) и М(2) членом  с коэффициентом а моделирует накопление сигналов, а членом
с коэффициентом а моделирует накопление сигналов, а членом  с коэффициентом b моделирует размытие накопленных сигналов. Таким образом, с учетом коэффициентов а, b, k могут сглаживаться малоразмерные импульсные помехи.
с коэффициентом b моделирует размытие накопленных сигналов. Таким образом, с учетом коэффициентов а, b, k могут сглаживаться малоразмерные импульсные помехи.
Представленные в различных формах уравнения теплопроводности модели М(1) и М(2) линейны, то есть корректны и имеют доказательства существования, единственности и устойчивости решения. Такое решение с достаточным быстродействием и несложной программно-технической реализацией может быть получено с помощью интеграла свертки, то есть с использованием известных методов и средств оптической и электронной расфокусировки. Возможна также реализация методами цифрового, аналогового, квазианалогового (эквивалентного по результатам) моделирования, с помощью конечно-разностной аппроксимации, с использованием фундаментального решения Кельвина и др.
Универсальная программная компьютерная или специализированная программируемая микропроцессорная реализация базовых моделей М(1) и М(2) позволяет с повышенной точностью адаптивно формировать закономерности накопления и размытия накопленных сигналов с высокой эффективностью для сложных "зашумленных" изображений.
Блок привода 3 электрическим управляющим входом подключен к блоку 2 и механически воздействующими выходами приводов соединен с блоком 4. В зависимости от конструкции рефлекторной поверхности блока 4 соответствующие приводы блока 3 исполняются пьезоэлектрически или (и) электромеханически. Функциями блока 3 согласно электрическим сигналам блока 2 являются механические исполнительные воздействия, например, на кольцевой остов блока 4 для пространственного слежения за объектом или (и) фокусировки (расфокусировки), а также воздействие на саму рефлекторную поверхность, ее области и элементы для изменений площади или (и) формы, обеспечивающих управление оптическим усилением.
Оптический блок 4 (рефлектор) механически соединен с блоком 3. Блок 4 представляет собой вогнутую рефлекторную структуру с поверхностью зеркальной для информативного диапазона длин волн входного и вспомогательного излучения. Изменение под действием привода блока 3 площади или (и) формы (часть сферы, параболоида и др.) в блоке 3 проводится одной из известных реализаций многоэлементных активных зеркал. Кольцевой остов рефлекторной структуры в зависимости от вида механического воздействия блока 3 передает движение как поисковой ориентации в пространстве обзора, так и расстояния фокусировки относительно блока 8. При этом управляемыми функциями блока 4 являются оптическое усиление, фокусировка (расфокусировка), визирование через блоки 6,7 на блок 8 или на кольцевой объект от блока 9.
Излучатели 5,9,10 могут быть объединены в трехсекционный блок с электрическими входами, подключенными к соответствующим выходам блока 2. Первая секция (первый излучатель 5) оптически ориентирована через центральные области блоков 6,7 на центральную область блока 8, вторая секция (второй излучатель 9) - на воспринимающую исходное излучение периферийную область блока 8, третья секция (третий излучатель 10) при соответствующем исполнении - непосредственно на поисковую область. Реализуется блок излучателей 5,9,10 полупроводниковыми излучателями соответствующих длин волн с меньшими размерами секции 5 и большими у секции 9 и у возможно имеющей свою рефлекторную структуру (на фиг. 1 не показана) секции 10. Функции блока излучателей для разных задач в различное время могут состоять в начальной калибровке, тестировании, текущей нуль-калибровке, гетеродинировании, в активном визировании направления на объект и в уточненной оценке дальности его, в обеспечении оценки его излучательной способности и потерь пропускания промежуточной поглощающей средой.
Блок 6 пространственной фильтрации по входу электрически соединен с выходом блока 2 и расположен оптически соосно между блоком 5 и центральной частью блока 7. Пример универсальной реализации блока 6 - жидкокристаллическая многоэлементная структура с изменяющейся оптической прозрачностью в зависимости от величины и геометрии подачи на электроды соответствующих элементов потенциалов с блока 2. Из-за неполных прозрачностей или закрытия по проходящему излучению элементов жидкокристаллической структуры для отдельных применений может быть использована более сложная по обеспечению универсальности, надежности и технологичности электромеханическая или пьезоэлектрическая элементарно-шторочная структура. В набор управляемых функций блока 6 входят обтюрация; расфокусировка с использованием корреляционной оптической фильтрации; относительно оптического центра изображения входного излучения вращение полосового фильтра (ВПФ) с информативной для определенных статических и движущихся объектов поиска шириной полос пропускания и перекрытия; формирования вращаемых относительно центра изображения конфигурации эталонных объектов.
Блок 7 спектральной фильтрации электрически соединен входом с выходом блока 2 и оптически соосно расположен между блоками 6 и 8. Функцией блока 7 является управляемое от блока 2 изменение спектральной прозрачности к входному излучению для оценки излучающей способности и потерь поглощения пропускающей средой с учетом использования окон прозрачности атмосферы.
Сенсорный блок 8 электрическим выходом соединен с блоком 2, а управляющим входом с его выходом. Блок 8 расположен оптически соосно с блоком 7 после него. Если центральная область блока 8 через центры блоков 6,7 оптически сориентирована на блок 5, то основная периферийная часть блока 8 сориентирована через блоки 6,7 на рефлекторную поверхность блока 4. Она геометрически может соответствовать зрительному более частому расположению элементов к центру и менее частому - к периферии. Причем условный периферийный центр представляет собой коаксиальную, пограничную c центральной калибровочной областью, достаточно узкую область сенсоров. При универсальной реализации блока 8 двусторонняя связь с блоком 2 обеспечивает возможность эффективного управления электронными чувствительностью, расфокусировкой и изменением контраста (позитив или негатив). Для простого специализированного обнаружения тепловых объектов блок 8 может быть представлен, например, двухплощадочными пироэлектрическими приемниками с ориентацией вторых площадок в центре на блок 5. При этом общее число приемников излучения в координатах X,Y должно быть большим или равным 4. Основная функция блока 8 состоит в пространственном преобразовании оптических излучений в электрические сигналы одновременно от исходного периферийного и вспомогательного центрального калибрующего или тестирующего потока излучения.
Возможно объединение блоков 5-8 в единую полупроводниковую структуру, что, хотя и сложно при технологической проработке на начальном этапе, но имеет преимущества в обеспечении надежности, весе, габаритах, технологичности и цене при массовом изготовлении.
В отдельных случаях конкретных применений устройство, реализующее заявляемый способ, может быть существенно упрощено за счет соответствующих конструкций блоков 3 и 4, блока 8, отсутствия блоков 1,6 с перенесением их функций на программную обработку в блок 2, а также отсутствия управления блоком 8 от блока 2, совмещения функций блоков 7 и 8 и т.д. Для удобства конкретных реализаций устройства блок 5 может быть размещен на линии центров блоков 6-8 с выпуклой стороны напротив соответствующего центрального отверстия блока 4; по ходу оптического излучения положение блоков 6 и 7 может быть взаимно обратным, то есть вначале блок 7, а за ним - блок 6; как показано на фиг. 2, возможно при введении в блок 4 гиперболической зеркальной поверхности перенести соосно расположенные блоки 6-8 за выпуклую сторону рефлекторного блока 4, развернув излучатель 5 и сориентировав его через центральное отверстие блока 4 на центр блоков 6-8.
Кроме того, реализация базовых преобразований М(1) и М(2) различными способами также увеличивает гибкость обеспечения универсальных возможностей заявляемого способа. Так, оптическая расфокусировка в видимом или инфракрасном (с существенно большим размытием) диапазонах может реализоваться блоками 2-4. Однако она связана с введением только Гауссовa расфокусирующего преобразования и энергоемкими операциями в блоках 3 и 4.
Эквивалентное расфокусировке преобразование исходного излучения может быть получено периодической подачей на центральные чувствительные элементы двухплощадочных пироэлектрических приемников сенсорного блока 6 вспомогательного гетеродинного излучения с блока 5.
Оптическая корреляция, использующая расфокусирующие маски в блоке 6, управляемoм блоком 2, может быть более универсальной и быстродействующей, но связана с относительно сложным обеспечением технологий изготовления блока 6.
Электронная расфокусировка может быть осуществлена в многоэлементном сенсорном блоке 8. Имея известные достоинства микроэлектронной реализации, она связана с начальной сложностью технологических разработок.
Вместе с тем аппаратное программное использование блоков 1-10 как для начальных преобразований и базового моделирования, так и для обеспечивающих операционных преобразований в наиболее полных объемах их использования существенно увеличивает возможности устройства и упрощает программную обработку.
Способ адаптивного обнаружения объектов на основе рассмотренных структур примеров устройства его исполнения по фиг. 1,2 и алгоритмической обработки по фиг. 3-6 реализуется следующим образом.
На начальном этапе алгоритма А1 (блок 2, фиг.4) задают значения исходных и вспомогательных излучений тестирования и эталонные характеристики. При этом вводят в память блока 2 исходные данные, содержащие входные и выходные кадры изображений электрических потенциалов тестирования Ит, эталонов Иэ с соответствующими порогами и характеристиками F: скорости V, направления движения Н, площади S, связности (замкнутости) С, расстояния между двумя объектами Р, ориентации О, центральных (скелетных) областей Ц, конфигураций К, экстремумов Э и градиентов Г многоградационных полей (сигналов, решетчатых функций, временных рядов), математических ожиданий М и дисперсии Д статистических совокупностей, узлов У сетей, изменений И траекторий. Их аргументами являются координаты X, Y, Z; длина волны λ и излучающая способность ε; время t. Введенные исходные данные используют на начальном этапе в настройке и обучении.
Режим тестирования (блок 3, фиг. 4) заключается в формировании блоком 5 излучения центральной части оптического потока калибровки Фтц, заданного потенциалом Итц от блока 2 при закрытом блоком 1 от блока 2 оптическом входе устройства (через блок 4 поток излучения Фп=0). Калибровочный поток Фтц через центральные области блоков 6 и 7 проходит на центральную область блока 8, где преобразуется в электрический сигнал И'тц. Одновременно потенциалом Итп от блока 2 излучатель 9 формирует основной периферический коаксиальный потоку Фтц поток Фтп. Он воспринимается периферией блоков 4,6-8 и в блоке 8 преобразуется в электрический сигнал И'тп.
В блоке 2 потенциалы тестирования Итц и Итп сравниваются с И'тц и И'тп. Оценивается погрешность тестирования δт и сравнивается с пороговой δп (блок 4, фиг.4).
При этом в соответствии с заданными в блоке 2 значениями исходное и вспомогательное излучения оптически одновременно рефлекторно формируют в блоках 4,5,9, управляют пропусканием блока 6, спектрально фильтруют в блоке 7, преобразуют в электрические сигналы в блоке 8, после чего в блоке 2 производят сравнения преобразуемых сигналов с учетом заданных эталонов, в том числе пороговых характеристик.
Подобным образом с учетом заданных характеристик F посредством блоков 1-10 воспроизводятся, например, блоком 6 по сигналам блока 2 тестируемые ситуации Ит (Итц, Итп{ Е} ), а также посредством блока 8 регистрируются в блоке 2 реакции И'т на них рассматриваемых блоков устройства. При априорно известных натурных поисковых ситуациях для открытого оптического входа Фп≠О) аналогично проводится натурное обучение. В блоке 2 анализируются погрешности δт(F), превышающие пороговые δп(F), проводится регистрация их (блок 5, фиг. 4), и находят иx возможные источники по блокам 1-10. Для автоматизованного или ручного уменьшения погрешности используют таблицы поправочных коэффициентов в блоке 2, регулировку, если требуется в процессе эксплуатации, проводят ремонт или замену элементов и узлов блоков 1-10 (блок 6, фиг. 4).
Таким образом, осуществляют преобразования по алгоритму А1 настройки и обучения, которые подготавливают устройство к надежной работе. Кроме того, подобно рассмотренному введенные исходные данные используются при самодиагностике и при обработке сигналов в процессе функционирования устройства.
Слежение по направлению в алгоритме А2 заключается в формировании блоком 2 исходного значения Фп (X,Y), которое, пройдя открытый блок 6 и блок 7, попадает на периферию блока 8 и преобразуется в электрические потенциалы Иi(Х, У)= И(Х, У) соответствующих сенсоров (для упрощения далее везде в алгоритмах обозначается как И). Блоком 2 они порогово преобразуются, и регистрируются обнаруженные по амплитуде объекты (блоки 7,8, фиг. 4). Если информативный объект расположен несимметрично относительно вспомогательного калибровочного излучения Фц (в это время Фц=0), то вырабатывается сигнал соответствующего управления приводом 3. Блок 3 поворачивает блок 4 для симметричного относительно центра визирования блока 8 на обнаруженный объект (блок 9, фиг. 4).
Упрощенное слежение по направлению, например, может быть осуществлено центральной областью блока 8, состоящей из двухплощадочных чувствительных пироэлектрических элементов. Появление сигнала(ов) на одном (нескольких) из периферийных элементов пироприемников (центральные элементы их в это время не облучаются блоком 5) сразу формируeт через блок 2 соответствующий сигнал управления приводом в блоке 3. Таким образом, направление излучающих объектов индицируют блоком 2, а по пространственному положению электрических сигналов этих объектов ориентируют блоком 3 рефлекторную поверхность блока 4, осуществляя визирование и слежение по направлению.
Слежение по дальности по алгоритму A3 за "захваченным" по направлению объектом проводится от блока 2 через соответствующий привод блока 3 перемещением блока 4, фокусирующим излучение на блок 8 (блок 10, фиг. 4). Такое перемещение Zф начинается с Zmin и проводится к Zmax. В момент достижения фокусировки при Z'ф образуется посредством блоков 3,4,8 фокусируемое усилением и ограничением снизу в блоке 2 обострение (в отличие от несфокусированной размытости сигналов) и увеличение амплитуды И(Z'ф) объекта. Этот момент может быть зафиксирован блоком 2 автоматически посредством выделения амплитудных максимумов фокусировки базовой моделью М(1). Обеспечивающими являются достаточное k и ограничение снизу инвариантно к положению объекта(ов) в плоскости с подавлением малоразмерных импульсных помех (блок 11, фиг. 4). Таким образом, блок 2 регистрирует в процессе фокусировки дальность всех обнаруженных объектов (блок 12, фиг. 4). Кроме того, эффективность уточненной оценки дальности может быть повышена использованием активного визирования объекта излучением блоков 9 или 10 и восприятием блоками 4,6-8,2.
Слежение по амплитуде по алгоритму А4 предварительно определяется пороговой оценкой входного сигнала И в блоке 2 (блок 13, фиг. 4). Если амплитуда И с учетом помех для конкретной задачи недостаточна, по сигналам блока 2 производится электронное в блоке 8 или (и) оптическое в блоке 4 усиление. Более эффективное оптическое усиление обеспечивается посредством управляемого блоком 2 соответствующего привода в блоке 3 путем увеличения рефлекторной площади блока 4 или (и) изменением ее формы, например со сферической на параболическую (блок 4, фиг. 4). При достаточной чувствительности, обеспечиваемой блоком 4, площадь и форма его могут быть неизменными, что для многих задач экономит технические ресурсы и энергию. Таким образом, не только обеспечиваются уточненное слежение по направлению, но и последующая обработка сигналов для эффективного обнаружения.
Блок 2 по исходному отслеживаемому по направлению и дальности И(Х,У) вырабатывает калибровочный формируемый излучателем 5 поток Фок. Он одновременно с периферийным преобразованием Фп преобразуется в центральной части блока 8 и вырабатывает нуль-компенсационный сигнал Δ Иoк (Фп-Фок), который определяет уточненный контроль Фп с учетом электрических и оптических помех (блок 15, фиг. 4).
Важнейшей составляющей, обеспечивающей надежное слежение в инфракрасном диапазоне, является учет неизвестной излучающей способности ε поискового объекта И(X,Y) с учетом потерь поглощения пропускающей средой с использованием окон прозрачности атмосферы. Это обеспечивается известными методами (см., например, Поскачей А.А., Чарихов Л.А. Пирометрия объектов с изменением излучающей способности.- М.: Энергия, 1978; Поскачей А.А., Чубаров Е.П. Оптико-электронные системы измерения температуры.- М.: Энергоатомиздат, 1988), основанными на априорной информации об объектах, а также в основном на многоспектральной и неклассической программной обработке в блоке 2 исходного Фп(x,y,z,t,λ), прослеженного по направлению и дальности объекта. Можно использовать как пассивную управляемую от блока 2 спектральную фильтрацию в блоке 7, так и активный режим облучения поискового объекта соответствующим спектральным составом излучения с помощью блоков 9 или 10.
Время реализации алгоритмов пространственно-амплитудного слежения по амплитуде, направлению и дальности определяется практически мгновенной обработкой и индикацией в блоке 2, быстродействием исполнительных движений блока 3, а также тем, что некоторые из этих функций могут осуществляться одновременно.
В блоках 2,6,8 устройства проводится нормирование амплитуд сигналов И(x, y) отслеживаемых объектов введением бинарного преобразования (алгоритм А5, Б1, фиг.5). Оптическое ограничение сверху осуществляется в блоке 6 введением посредством управления от блока 2 "затемняющего" фильтра, не пропускающего особо яркие сигналы исходного многоградационного излучения. В блоках 2,8 ограниченные сверху сигналы усиливаются и ограничиваются снизу. Здесь же может быть осуществлено и электронное ограничение сверху. При этом происходит формирование уровня И(1) от объекта и уровня Т(0) от фона с позитивным контрастом И(0,1). По сигналу блока 2 в нем или в блоке 8 может быть осуществлено негативное преобразование с контрастом негатива И(0,1). Таким образом, нормированные по амплитуде объекты могут быть дальше преобразованы с помощью М(1) и М(2) в блоках 2,8 электронной реализацией или оптически, передачей бинарных изображений с блока 2 через блок 9 в блоки 4,6-8,2 при закрытом блоке 1.
Излучение нормированных по амплитуде плоских объектов расфокусируют в блоке 4 (посредством блоков 2,3,8) или в блоке 6 (посредством блоков 2,8). Подобный эффект дает гетеродинное оптико-электронное преобразование блоками 2,5,8 или статическое моделирование М(1) в блоках 2,8 или в блоке 2 (блок 2, фиг. 5). При этом исходные сигналы пространственно накапливают, размывают, размытые максимумы выделяют из неинформативного ограничением снизу и пропусканием их верхушек Иfц > И0, из которых формируют сигналы И(1) на нулевом фоне И(0). Если исходные объекты многосвязны или имеют большую протяженность, то в результате выделяется скелет объекта. Если односвязный - центральные области. Используя одновременно оптическим блоком 6 ограничение сверху, усиление и ограничение снизу, многоградационные объекты получают нормированные по площади центральные области различных, в том числе протяженных, односвязных объектов. Для получения нормированных по площади многосвязных объектов необходимо одновременно с поточечной оценкой площади скелетной области при сравнении с заданной нормой масштабировать ее относительно условного центра объекта. Все эти центральные (скелетные) преобразования инвариантны к геометрии, амплитуде и контрасту, а также к положению объектов и обеспечивают исключение малоразмерных, импульсных помех всего исходного излучения.
Сигнал FOБ2 выделенного центра объекта посредством передачи из блока 2 в блок 3 ориентирует блок 4 по оси визирования (блок 3, фиг. 5). При необходимости проводится цикл уточнения амплитудно-пространственных характеристик центрированного объекта.
Выделение характеристик движения по алгоритму А6 включает оценки скорости V(x, y), ее изменений ΔV(t) (блок 4, фиг. 5) и определение направления движения (блок 5, фиг. 5) точечных нормированных по амплитуде объектов для надежного опознания находящихся от границ кадра не менее длины следа движения.
Исходные нормированные по амплитуде точечные объекты расфокусируют в блоках 4 или 6, а также в блоках 2,5,8 или 2,8, или 2 (подобно рассмотренному для блока 2, фиг. 5, но с учетом движущейся области задания) можно преобразовать динамическим моделированием М(2). Относительно неподвижных движущиеся объекты выделяют в блоке 2 по уменьшению амплитуды размытых движущихся максимумов, по увеличению площади инерционного следа этих максимумов и по изменениям длительности фронтов их в полосе движения. В программно-зафиксированный в блоке 2 момент времени (определяемый коэффициентами а, b, k, в М(2), быстродействием и четкостью регистрации в блоке 2) производят оценку таких изменений, пропорциональную скорости движения V(x,y). По изменениям во времени определяют оценки приращений скорости ΔV(x,y,t) и периодичность движения (блок 4, фиг. 5).
В следах нормированных преобразованных согласно М(2) размытых максимумов движущихся объектов в блоке 2 по наиболее крутым фронтам этих максимумов (блок 5, фиг. 5) с max grad И(н) можно определить направление движения. В обратном направлении следы объектов более всего растянуты и имеют: max Ин1 по площади ΔS(н), min grad И(н). Для повышения эффективности локального поточечного обнаружения информативных наиболее крутых фронтов блоком 2 в блоке 6 регулируют направление анизотропии или полосовой фильтрации исходного излучения с блока 4. Тем самым сигналы, прошедшие блок 6 искаженных объектов, не совпадающих с этим направлением, будут иметь существенно меньшую площадь. Этого добиваются введением относительно центра кадра изображения вращаемого полосового фильтра (ВПФ). Он, в частности, при диаметре условно точечного объекта Rи, принимаемом за 100%, имеет ширину шторки Rш, равную ширине открытого участка Ro между шторками и равную 50% Rи. Выбрав углом поворота ВПФ в блоке 6 информативное направление в блоке 2, выделяют искомые сигналы max Ин(ΔS(н)) с max grad И(н). При этом сложная технологическая реализация на начальном этапе анизотропии и расфокусировки может иметь преимущества в надежности и универсальности. Реализация подобных преобразований в блоке 2 сложнеe программным обеспечением, хотя и не требует значительных аппаратурных затрат.
Согласно рассмотренному в алгоритме А5 различные исходные односвязные объекты могут быть нормированы по площади вплоть до точечных объектов, что существенно расширяeт область использования алгоритма А6.
В упрощенных реализациях конкретных задач определения характеристик движения может быть также использована сущность пироэлектрического градиентного восприятия в блоке 8 движущихся объектов.
Все оценки движения регистрируются в блоке 2 инвариантно к положениям траекторий движения, к количеству точечных и сводящихся к ним объектов (блок 6, фиг.5).
Введя для нормированных амплитуд подобно рассмотренному (блок 5, фиг. 5) ВПФ и расфокусировку, но согласно модели М(1) для статических или условно статических точечных или плоских односвязных объектов согласно алгоритму А7 оценивают в фиксированный момент времени расстояние между двумя объектами (блок 7, фиг. 5). Отличие заключенного между непрозрачными полосами и негативными сигналами двух объектов расстояния между ними от расстояний до границы кадра изображения состоит в том, что у информативного участка размытого максимума размыты оба фронта в отличиe от неинформативных пограничных участков, хотя бы с одним крутым фронтом на границе кадра. Амплитуды информативных размытых максимумов фиксированных во времени оценок расстояний регистрируются в блоке 2 (блок 8, фиг. 2).
Согласно алгоритму А8 для точечных, условно точечных, а также нормированных по амплитуде и площади (см. А5, Б1, фиг. 5) односвязных объектов преобразования по модели М(1) можно выделить такие статистические оценки вероятностей, как математическое ожидание М, дисперсия Д и среднеквадратичное отклонение ϑ (блок 9, фиг. 5). При этом коэффициенты k и а имеют значения, большие для объединения конкретных точечных совокупностей в единый по площади рельеф с максимальным значением коэффициента b размытия этого рельефа для соответствующего выделения центральных максимумов совокупности. Координаты этих максимумов определяют положение математического ожидания М, а амплитуда - дисперсию Д. По квадратичной зависимости Д определяется среднеквадратическое отклонение ϑ. Если требуется для уточнения, блок 4 посредством блока 3 может быть от блока 2 сориентирован по координатам математического ожидания М. Программой блока 2 могут быть изменены площадь и форма рефлекторной поверхности блока 4 и произведено повторным циклом (на фиг. 5 не показано) уточнение оценок М, Д, ϑ. Их регистрация происходит в блоке 2 (блок 10, фиг. 5).
Согласно алгоритму А9 (блок 11, фиг. 5) для нормированных амплитуд оценка площади S может быть определена как  где р - число сенсоров периферии блока 8, воспринимающих площадь объекта. Эффективные приближенные оценки S с помощью преобразования М(1) подобно рассмотренному в блоке 2, фиг. 5 позволяют определить в фиксированный момент времени пропорциональные площади Иfs(x, y) амплитуды центральных размытых максимумов компактных односвязных объектов, причем независимо от их размеров, положения, с отстройкой от неинформативного при Иs(х,у)>Ио, импульсных, малоразмерных помех. Для протяженных, многосвязных объектов проводится оценка площади S(x, y) (блок 12, фиг.5).
где р - число сенсоров периферии блока 8, воспринимающих площадь объекта. Эффективные приближенные оценки S с помощью преобразования М(1) подобно рассмотренному в блоке 2, фиг. 5 позволяют определить в фиксированный момент времени пропорциональные площади Иfs(x, y) амплитуды центральных размытых максимумов компактных односвязных объектов, причем независимо от их размеров, положения, с отстройкой от неинформативного при Иs(х,у)>Ио, импульсных, малоразмерных помех. Для протяженных, многосвязных объектов проводится оценка площади S(x, y) (блок 12, фиг.5).
В блоке 13 согласно фиг. 5 сравнивается число сенсоров р площади объекта с оценкой n условной точечности. При р>n оценки площадей неточечных объектов используются для последующего их обнаружения. При р<n условно точечные объекты подлежат анализу соответственно операторам преобразований F в них.
Согласно алгоритму А10 в блоке 14, фиг. 5 проводится сравнение результатов алгоритмов А2-А8 для И(F) с соответствующими эталонными значениями Иэ(x,y,z,t,λ,ε,ц,v,н,p,м,д). Учитываются в блоке 2 устройства пространственно-амплитудное движение (А2-А4, фиг. 4) по направлению, дальности и амплитуде, а также оценки динамики движения V, ΔV(t), H, расстояний Р, статистических оценок М,Д совокупностей. На основе этого распознаваемые точечные объекты или их совокупности, информативные для конкретных задач, регистрируются блоком 2 устройства (блок 15, фиг. 5). При этом здесь и далее на всех этапах при нестандартных ситуациях программой блока 2 может предусматриваться вызов оператора для более полного анализа и принятия решения. Оценки F(Ц,V,Н,Р,М,Д) для центральных областей неточечных объектов фиксируются блоком 2 для последующего информативного обнаружения.
Выделение амплитудных характеристик (A11 в блоках 1-3, фиг.6) для многоградационных полей, сигналов, решетчатых функций и временных рядов может проводиться в блоках 2,4-8 устройства.
Эквипотенциальные уровни И(x,y)=const поточечно или после преобразования М(1) программно выделяют в блоке 2 сравнением исходных сигналов И(х,у) с задаваемыми информативными числовыми значениями И' и фиксацией моментов равенства. Также, сравнивая соседние значения, программно можно выделить и оценить экстремумы и градиенты. Однако точечность без преобразований М(1) с минимальными а, b,k ограничиваeт эффективность (по производительности, загрузке блока 2 и помехоустойчивости) обработки больших многоградационных массивов.
Выделить изменения, в том числе экстремумы сигналов (в блоке 1,2, фиг.6) в пространстве и времени может позволить физическая природа используемых в сенсорном блоке 8 пироэлектрических приемников. Причем отличие градиентов от экстремумов фиксируется для последних в блоке 8 переходом разнополярного сигнала через ноль (var sign). Селекция градиентов и экстремумов по величине определяется сопоставлением с эквипотенциальными уровнями, получаемыми в управляемой блоком 2 пироэлектрической структуре блока 8, с управляемой от блока 2 обтюрацией входного излучения в блоке 5 (гетеродинная модуляция по var Фб5(Иб2) или в блоке 6.
Выделение амплитудных характеристик с одновременной отстройкой от неинформативных параметров и помех при высоком информационном сжатии обеспечивает использование расфокусировки (частичной) или эквивалентного и даже более эффективного в данном случае преобразования М(1). При этом эквипотенциале определяют исходные сигналы и фиксированные пороговые значения, а градиенты и экстремумы - разность сигналов исходного и размытого изображения. Селекция максимумов проводится по положительной, а минимумов по отрицательной разностям. Локализация градиентов может быть получена контролем изменения знака разности. При этом наиболее высокий уровень информационного сжатия - для градиента, а существенно меньший - для экстремумов и эквипотенциалей. Преобразованные из исходного многоградационного излучения или из его разности с сигналами его расфокусировки или преобразования М(1) результаты регистрируются в блоке 2 устройства (блок 3, фиг.6).
При реализации алгоритма А12 (блоки 4-6, фиг.6) для бинарно преобразованных амплитуд (блок 1, фиг.5) сетевых структур с нормированным сечением r(x, y)= const (например, как в блоке 2, фиг.5) используют преобразование М(1) с рассмотренными возможностями различных его реализаций блоками 2-6,8. При этом в процессе преобразования М(1) из исходного бинарного изображения сети с учетом достаточного накопления (коэффициент а) и размытия (коэффициент b) в узлах выделяются энергетические центры накопления. Они проявляют себя амплитудами размытых максимумов, которые порогово (Иу>Ио) регистрируются в блоке 2 устройства (блок 6, фиг.6). Причем узлы, соединяющие большее число путей, имеют большие амплитудные максимумы. Таким образом, из нормированного по амплитуде и сечению, расфокусированного или статически моделируемого по М(1) (с разной реализацией в блоках 2-6,8) изображения выделяют пропорциональные числу путей амплитуды размытых максимумов узлов сети.
При локальном контроле имеющейся траектории или в процессе движения из нормированного по амплитуде Ин (блок 1, фиг.5) и сечению r(x,y)=const (блок 2, фиг. 5) излучение сканируемого участка траектории из блока 4 с разной реализацией в блоках 2-6,8 расфокусируют или статически моделируют по М(1) (блок 5, фиг. 6). Используют накопление и размытие выделяемых локальным увеличением амплитуды размытых максимумов Иfн(х,у) в месте изменения траектории. В фиксированный момент времени оценивают в блоке 2 место и степень изменения направления траектории Иfи(х,у) относительно неизменного И const по его превышению.
Выделенные и оцененные узлы сети У по Иfy(x,y) и изменения траектории И по Иfи(х,у) регистрируются в блоке 2 устройства (блок 6, фиг.6).
Согласно алгоритму А13 геометрических интегральных и дифференциальных оценок бинарно преобразованных плоских объектов начнем с ограниченной группы интегральных оценок, с опознавания конфигураций К(х,у) нормированных по амплитуде (блок 1, фиг. 5) центрированных (блоки 2,3, фиг.5) сигналов Кц, например, позитивного контраста (блок 7, фиг.6), для Кц(х,у; 1,0). В блоке 6 под управлением блока 2 вращают относительно центра непрозрачную маску эталонной конфигурации Кэц(х, у; 0,1). Если при таком вращении в блоке 6 происходит перекрытие исходного излучения Кц эталонной маской Кэц, то результирующий электрический нулевой сигнал в блоке 8 будет означать, независимо от исходной оси ориентации объекта, обнаружение его К(х,у). Момент времени такого совпадения определяет ориентацию FO(x,y) исходного объекта. Введение посредством блока 2 в блоке 6 масштабирования эталонного Кэц позволит оценивать конфигурации разной площади и удаленности. Таким образом, перекрывая нормированный по амплитуде центрированный плоский объект вращаемой (в блоке 6) маской эталона, электрически нулевым совпадением в блоке 8 обнаруживают программно в блоке 2 соответствующую эталонной конфигурации К(х, у), а ее ориентацию FO К(х,у) определяют углом такого совпадения.
Оценки связности (замкнутости)(блок 8, фиг.6) исходного излучения из блока 4 нормированных по амплитуде и негативному контрасту (блок 1, фиг.5) плоских объектов Ф (И(0,1)) определяют расфокусировкой или использованием преобразования М(1) и селекцией более размытых, чем у фона, амплитудных сигналов замкнутых внутренних вырезов. Полученные таким образом меньшие амплитуды фона информативные сигналы размытых максимумов Иfc(x,y) определяют площади замкнутых вырезов Sвв, а их количество N(Иfc) - многосвязность объекта. Оценка связности возможна одновременно для различных по количеству, форме, площади, размерам объектов инвариантно их положению. Для сети сложной топологии подобным образом могут оцениваться замкнутые области - циклы.
Оценка ориентации нормированных по амплитуде (блок 1, фиг.5), площади (блок 2, фиг.5) и конфигурации односвязных плоских объектов (блок 9, фиг.6) проводится подобно рассмотренному при оценке направления движения (блок 5, фиг. 5). Также блоком 2 в блоке 6 регулируют направление анизотропии или полосовой фильтрации (ВПФ) с шириной участков решетки, определяемой размерами исходных объектов. Только при информативном для данного объекта угле поворота ВПФ вся условная длина объекта пройдет между непрозрачными полосами и даст в блоке 8 сигнал максимальной площади. Используя модель М(1) для селекции информативных размытых максимумов площади, оценивают ориентацию плоских объектов инвариантно к их положению, к импульсным и малоразмерным помехам для разных объектов уровнями большими пороговых.
Оценка размеров (блок 10, фиг.6) проводится для центрированного (блок 3, фиг.5) известной конфигурации соразмерной площади и ориентации (блок 9, фиг. 6) объекта, нормированного по амплитуде, например, позитивного контраста Инцо(1,0). Для этого в блоке 6 под управлением блока 2 перекрывается исходное излучение с блока 4 ориентированными, например, по взаимно перпендикулярным длине и ширине, масками размеров. Рациональный задаваемый блоком 2 цикл преобразований может состоять в рассмотренных операциях: центрирования объекта, оценки его ориентации; информативных сигналов, пропущенных маской и преобразованных при малых а,b,k расфокусировкой или моделью М(1) в амплитудные размытые максимумы, последующих других циклов наложения масок и собственно оценки размеров по амплитудам размытых максимумов в фиксированные моменты времени. С помощью масштабирования центрированных масок может быть осуществлена сортировка деталей по допускам размеров.
Регистрация, согласно алгоритму А13, опознанных конфигураций, геометрических оценок связности, ориентации, размеров осуществляется в блоке 2 устройства, реализующего осуществляемый способ (блок 11, фиг.6).
На основе пространственно-амплитудного слежения (А2-А4, фиг.4) по направлению, дальности, амплитуде, оценок (А5-А10, фиг.5) центральных областей, динамики движения, расстояний между объектами, статистических оценок совокупностей объектов, а также оценок (А11-А13, фиг.6) амплитуд полей и сигналов, сетей, траекторий и геометрии плоских конфигураций в блоке 2 устройства, согласно алгоритму А14 (блоки 12,13, фиг.6), сравниваются подготовленные А1 результаты А2-А13 для И(F) с соответствующими эталонами Иэ(x,y,z,t,λ,ε,t,ц,v,н,p,м,д,э,г,у,и,к,s,c,o,r).
Результаты обнаружения неточечных объектов регистрируются блоком 2 (блок 13, фиг. 6). Таким образом, пространственно-амплитудным слежением и соответствующими групповыми оценками адаптивно обнаруживают на фоне помех информативные объекты.
В сравнении с ближайшими аналогами существенно расширен круг решаемых задач адаптивного поиска и обнаружения.
Так, более эффективные рефлекторность (с возможностью максимального оптического усиления) и одновременность преобразования исходного и вспомогательного излучения обеспечивают быстродействие получения надежных результатов.
Спектральная программная обработка с учетом излучающей способности объекта и потерь поглощения пропускающей средой, а также фокусировка и ориентация на объект формируют более широкие резервы достоверного амплитудного слежения.
Возможности пассивного и уточняющего активного поиска в разных спектральных диапазонах со слежением по направлению и дальности также повышают надежность адаптивного поиска обнаружения.
Оптико-электронные методы расфокусировки, пространственное управление пропусканием излучения, центрированное коаксиальное и периферическое гетеродинирование, а также спектральные программированные преобразования обеспечивают неограниченные для конкретных задач возможности диагностической обработки на основе базовых преобразований сигналов пространственно-амплитудно отслеживаемых объектов.
Для различных классов объектов эффективным информационным сжатием в основном инвариантно пространственному положению к малоразмерным и импульсным помехам выделяют такие информативные диагностические признаки, как центральные (скелетные области), площади, конфигурации, связность (замкнутость), ориентация, размеры, расстояния, скорость, ее изменения и направления движения точечных и плоских объектов, математические ожидания, дисперсии, среднеквадратические отклонения точечных и сводящихся к ним совокупностей объектов, эквипотенциальные, градиентные и экстремальные области многоградационных полей (сигналов, решетчатых функций, временных рядов), узлов сетей и изменений направлений траекторий.
Такие осуществляемые с помощью предложенного устройства высокоинформативные методы контроля и слежения, диагностической оценки состояний и ситуаций с возможностью дублирования (многие ограничения могут быть преодолены параллельной или комбинированной с повторными циклами, например, через блок 9, обработкой), пространственного совмещения, многоспектральности и множественности оценок, с рациональными настройкой, обучением, самодиагностикой и обработкой, даже в случае временного прекращения поступления поисковой информации обеспечивают существенно более эффективный адаптивный поиск и обнаружение объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ ФОРМООБРАЗОВАНИЯ ПРИ СВАРКЕ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2127177C1 |
| СПОСОБ ДИАГНОСТИКИ ИНДУКЦИОННОЙ ПАЙКИ | 1998 |
|
RU2132262C1 |
| СПОСОБ ДИАГНОСТИКИ КОНТАКТНОГО ОРЕБРЕНИЯ | 1998 |
|
RU2133180C1 |
| СПОСОБ ДИАГНОСТИКИ КОНТАКТНОЙ СВАРКИ | 1998 |
|
RU2133179C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА КАЧЕСТВОМ СВАРКИ ПЛАВЛЕНИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2113327C1 |
| Устройство для моделирования и оценки статистических параметров | 1983 |
|
SU1173425A1 |
| Способ контроля связности объекта | 1985 |
|
SU1392362A1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ И УПРАВЛЕНИЯ КАЧЕСТВОМ ЛАЗЕРНОЙ СВАРКИ | 2004 |
|
RU2258589C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ ЭЛЕКТРОННЫХ ПЛАТ | 1991 |
|
RU2033599C1 |
| Устройство для регистрации подвижных объектов в зависимости от скорости движения | 1975 |
|
SU550669A1 |



Устройство для адаптивного обнаружения объектов, реализующее заявленный способ, содержит входной блок 1, оптический блок 4, блок спектральной фильтрации 7, операционный блок 2 и электрически связанные с ним излучатель 5, расположенные по ходу оптического излучения блок пропускания излучения 6 и сенсорный блок 8, электрически подключенные к операционному блоку сориентированный на оптический блок второй излучатель 9, сориентированный на центральную область входного блока третий излучатель 10 и механически соединенный с оптическим блоком блок привода 3, связанный электрически с операционным блоком, с которым также электрически связан входной блок, а расположенный между блоком пропускания излучения и сенсорным блоком блок спектральной фильтрации связан электрически с операционным блоком. Первый излучатель сориентирован через центральные области блока пропускания излучения, блока спектральной фильтрации на центр сенсорного блока, а второй излучатель сориентирован на периферийную область оптического блока. Технический результат заключается в повышении надежности и достоверности адаптивного обнаружения различных объектов. 2 c. и 4 з.п. ф-лы, 6 ил.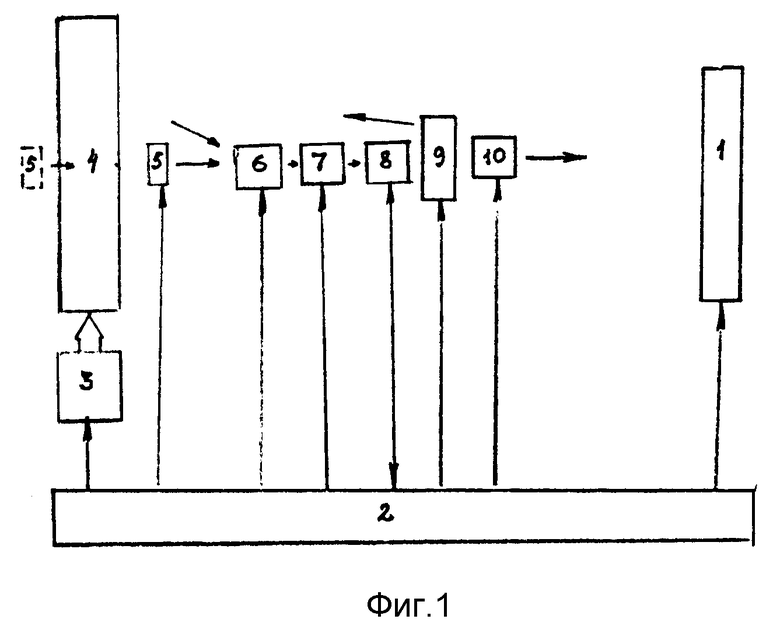
| УСТРОЙСТВО ПОИСКА ОБЪЕКТОВ | 1992 |
|
RU2048687C1 |
| АДАПТИВНЫЙ ТЕЛЕСКОП | 1991 |
|
RU2020522C1 |
| УСТРОЙСТВО ОХРАННОЙ СИГНАЛИЗАЦИИ | 1991 |
|
RU2020590C1 |
| RU 2058593 C1, 20.04.96. | |||
